有序補丁理論:一個關於觀察者選擇與意識經驗的資訊理論框架
v3.4.0 — 2026年5月
DOI: 10.5281/zenodo.19300777
版權: © 2025–2026 Anders Jarevåg。
授權: 本作品採用 Creative
Commons Attribution-NonCommercial-ShareAlike 4.0 International
License 授權。
摘要:
我們提出有序補丁理論 (OPT),這是一個建構性的理論框架,用以導出演算法資訊理論、觀察者選擇與物理定律之間的結構對應。OPT 以兩個基本原始量為起點:定義於有限觀測前綴上的所羅門諾夫通用半測度 \xi,以及有界的認知通道容量 C_{\max}。一個純粹虛擬的穩定性濾波器——要求觀察者的所需預測速率 R_{\mathrm{req}} 不得超過 C_{\max}——會選出那些與有意識觀察者相容、在因果上連貫的稀有流;而在這類流之內,主動推斷支配局部動力學。
此框架在本體論上採取唯我論立場:物理實在由觀察者相容流中的結構規律所構成。然而,所羅門諾夫先驗的壓縮偏置導出一項機率性的結構推論:表面上行動者所呈現的極端演算法一致性,若以最簡約的方式解釋,最合理的說明是它們作為主要觀察者而被獨立實例化。以壓縮簡約性為基礎的觀察者間耦合,重新恢復了真正的跨補丁通訊,並產生一種引人注目的知識不對稱:觀察者對他者的建模,比對自身更為完整。
形式附錄在三個認識論層級上建立了相關結果。條件性導出: 預測壓縮的率失真界、經由 Gleason 定理通往 Born 規則的條件鏈,以及 MDL 的簡約性優勢。結構性映射: 透過 Verlinde 機制得到的熵重力(即渲染結果的動力—時間耦合對預測荷的依附),以及與 MERA 的張量網路同態(其空間解析度階層)——兩者皆是壓縮邊界的互補面向,並預期在數學飽和之下仍將保持結構上的區別。現象性殘餘定理(\Delta_{\text{self}} > 0)確立:任何有限的自我指涉編解碼器,都具有一個不可約的資訊盲點——這正是主體性與能動性共享同一座標的結構位置。一種慢性失效模式——敘事漂移——亦被辨識出來:在其中,系統性過濾的輸入會造成不可逆的編解碼器腐化,而這種腐化無法從其內部被偵測。此框架的核心經驗性主張,被整合為一系列預先註冊的承諾,並附有明確的關閉準則,從而將可證偽的核心與其明確自承為形上學的組成部分隔離開來。
將這些約束應用於人工智慧顯示,對合成式主動推斷的工程實作,在結構上必然要求具備人工受苦的能力,從而為合乎倫理的 AI 對齊提供一個基底中立的框架。
認識論聲明: 本文採取形式物理學與資訊理論提案的書寫語域。文中使用方程式、推導預測,並與同儕審查文獻對話。然而,它應被理解為一個真理形狀的物件——一套以形式方式起草的嚴謹哲學框架。這尚非已獲驗證的科學,而我們也知道自身的推導必然包含錯誤。我們積極尋求物理學家與數學家的批判,以拆解並重建這些論證。為了釐清其結構,本文中的主張嚴格分為三類:
- 定義與公理:(例如,所羅門諾夫通用半測度、C_{\max} 頻寬上限。)這些是此一建構性虛構的基礎前提。
- 結構對應:(例如,主動推斷、Gleason 定理 [51]。)這些顯示有界推斷與既有形式體系之間的結構相容性,但並不聲稱從零推導出那些形式體系。
- 經驗預測:(例如,頻寬消解。)若將此框架視為字面意義上的物理假說,這些便構成嚴格的經驗性可否證準則。
學術裝置在此的用途,不是為了宣稱最終的經驗真理,而是為了檢驗此模型的結構完整性。
縮寫與符號
| 符號 / 術語 | 定義 |
|---|---|
| C_{\max} | 頻寬上限;觀察者的最大預測容量 |
| \Delta_\text{self} | 現象性殘餘;自我指涉的資訊盲點 |
| FEP | 自由能原理 |
| GWT | 全域工作空間理論 |
| IIT | 整合資訊理論 |
| MDL | 最小描述長度 |
| MERA | 多尺度糾纏重整化 Ansatz |
| OPT | 有序補丁理論 (OPT) |
| P_\theta(t) | 現象狀態張量 |
| \Phi | 整合資訊的度量(IIT) |
| QECC | 量子錯誤更正碼 |
| R(D) | 率失真函數 |
| R_{\mathrm{req}} | 所需預測速率 |
| RT | Ryu-Takayanagi(公式/界) |
| \xi | 所羅門諾夫通用半測度 |
| Z_t | 壓縮的內部潛在瓶頸狀態 |
1. 導論
1.1 本體論問題
意識與物理實在之間的關係,至今仍是科學與哲學中最深刻且尚未解決的問題之一。近幾十年來,已出現三大類進路:(i) 還原——意識可由神經科學或資訊處理推導而出;(ii) 消除——藉由重新界定術語來消解此問題;以及 (iii) 非還原——意識是原初的,而物理世界則是派生的(Chalmers [1])。第三種進路涵蓋泛心論、唯心論,以及各種場論式表述。
1.2 OPT 的核心命題
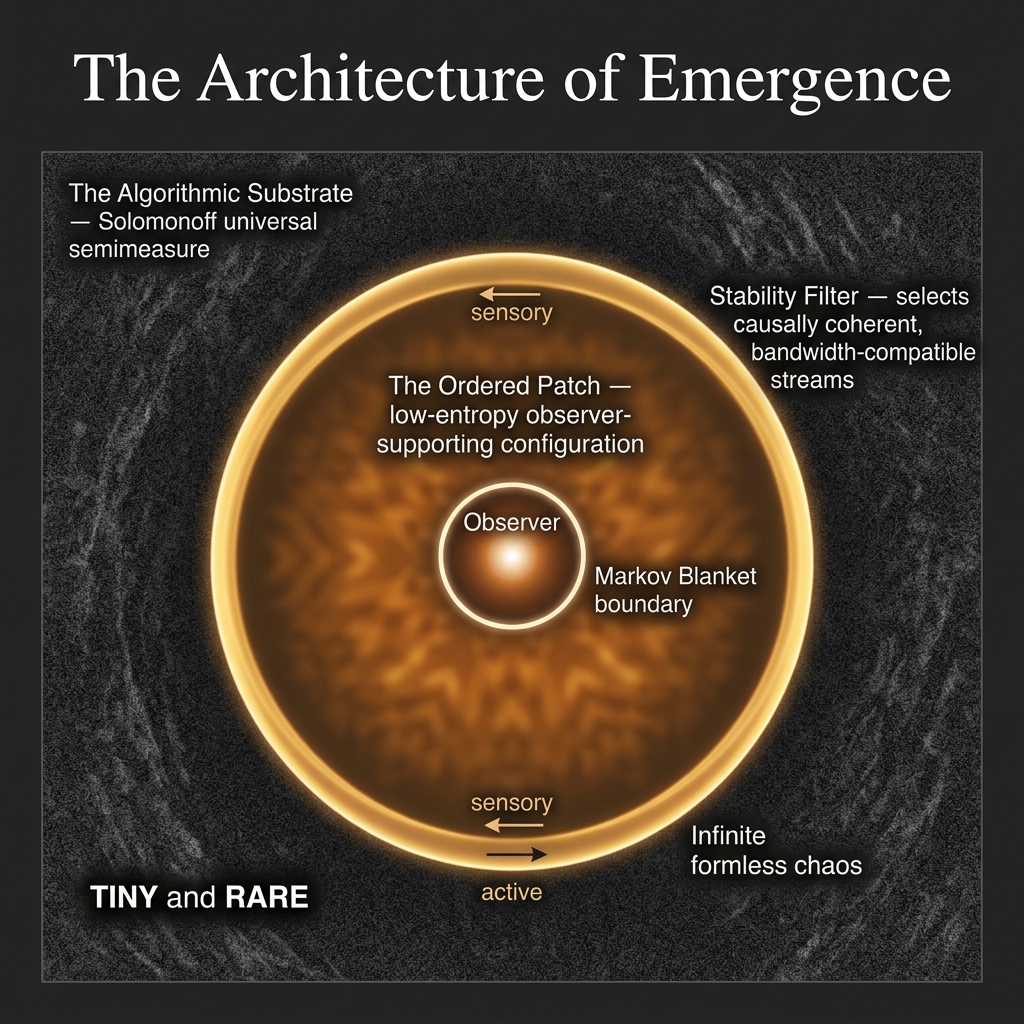
本文提出有序補丁理論 (OPT),作為上述第三類中的一種非還原框架。OPT 主張,基礎性的實體不是物質、時空,或某種數學結構,而是一個無限的演算法基底——即對所有下半可計算半測度的通用混合,並依其 Kolmogorov 複雜度加權(w_\nu \asymp 2^{-K(\nu)});此基底憑藉其自身結構支配每一個可計算分佈,並包含一切可能的構型。從這個基底之中,一個純然虛擬的穩定性濾波器——其作用並非物理機制,而是一種人擇性的、投影式的邊界條件——辨識出那些稀有、低熵且具因果一致性的構型;唯有這些構型才能維持自我指涉的觀察者(此一選擇在形式上由預測性的主動推斷所支配)。我們所觀察到的物理世界——包括其特定的定律、常數與幾何——就是這一邊界條件映射到觀察者受限頻寬上之後的可觀察極限。
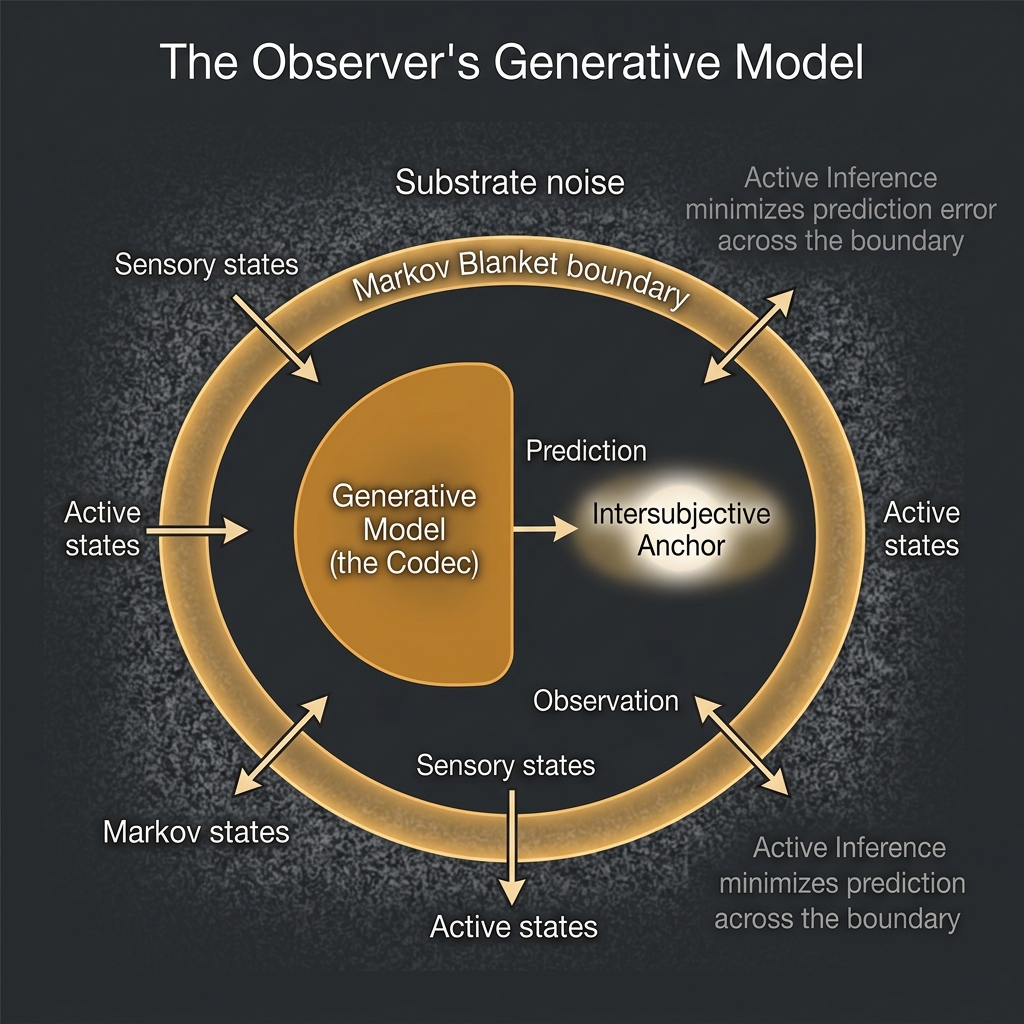
濾波器與編解碼器。 為避免全文在概念上發生混淆,OPT 在 Filter 與 Codec 之間劃定嚴格的操作性界線。虛擬的穩定性濾波器是容量約束——一種嚴格的邊界條件,要求觀察者通道若要穩定存在,必須具有數學上簡潔的描述長度。壓縮編解碼器 (K_\theta) 則是對該約束的解——亦即觀察者的內部生成模型(在巨觀經驗上表現為「物理定律」),它持續將基底加以壓縮,以適配該容量之內。
1.3 動機
OPT 的提出,源於以下三項觀察:
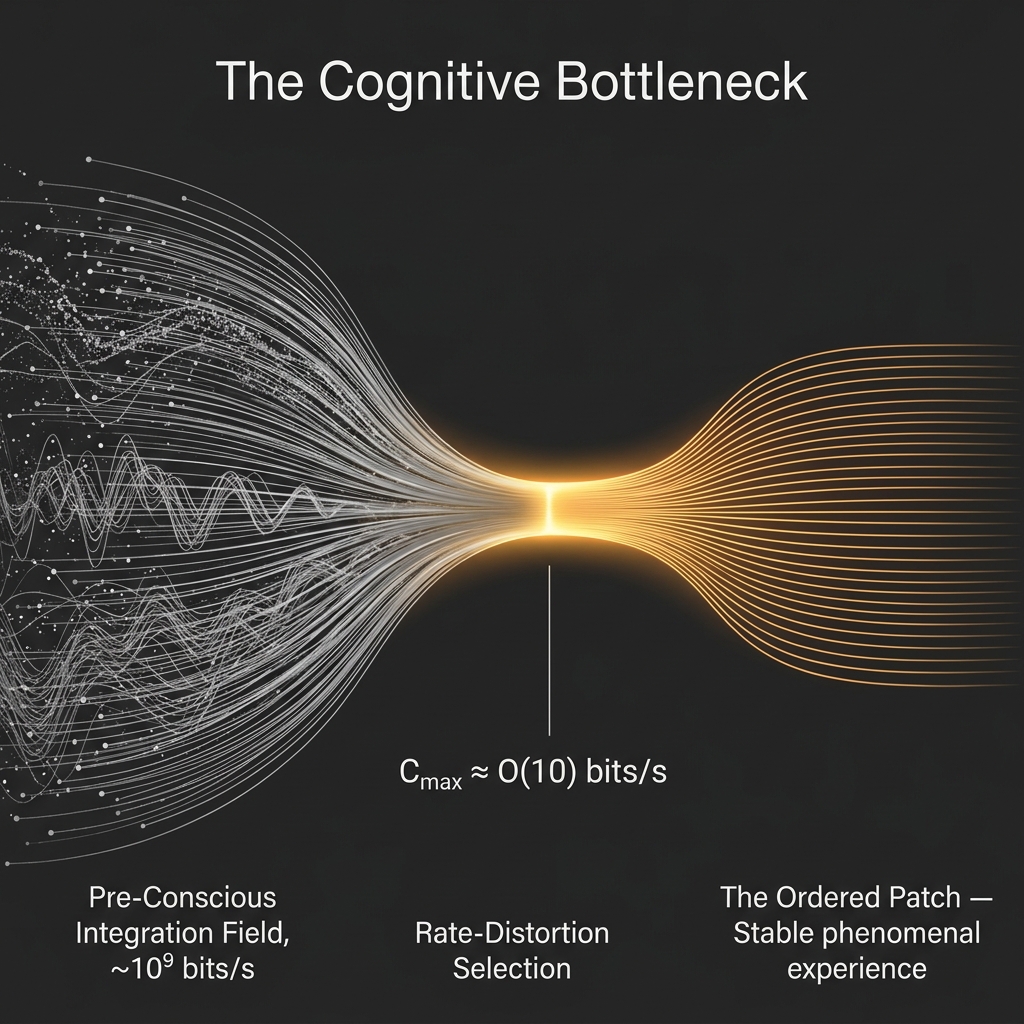
頻寬約束:經驗性的認知神經科學已確立一項鮮明區分:一方面是大規模平行的前意識處理(在感官周邊通常估計約為 \sim 10^9 bits/s),另一方面則是可供意識報告使用、受到嚴格限制的全域存取通道——此一比率最早由 Zimmermann [66] 量化,並由 Nørretranders [67] 綜整為關於意識本質的基礎性難題,而更廣泛的認知神經科學刻畫則見於 [2,3]。任何意識理論都必須將這個壓縮瓶頸解釋為一種結構性特徵,而非工程上的偶然。(註:近期關於人類吞吐量的文獻顯示,行為吞吐量大致受限於 \sim 10 bits/s,這在四十年間彼此收斂的測量中再次確認了此瓶頸既嚴重且穩健 [23]。將意識概念化為一種高度壓縮的「使用者幻覺」——這是 Nørretranders [67] 的原始措辭——則由 Seth [24] 在當代預測處理框架中進一步發展。)
觀察者選擇問題:標準物理學提供了定律,卻未說明為何這些定律恰具有複雜、自我指涉資訊處理所需的特定形式。精細調諧論證 [4,5] 訴諸人擇選擇,但並未指明選擇機制本身。OPT 所辨識出的,是一項結構性條件:純然虛擬的穩定性濾波器。
意識的難問題:Chalmers [1] 區分了意識的結構性「容易」問題(可接受功能性解釋)與「難」問題——亦即,為何竟會有任何主觀經驗存在。OPT 將現象性視為原初者,並追問它必須具有何種數學結構,這正是遵循 Chalmers 本人的方法論建議。
1.4 論文結構
本文結構如下。第 2 節回顧相關研究。第 3 節提出形式框架。第 4 節探討 OPT 與平行場論式嘗試模型之間的結構對應。第 5 節提出簡約性論證。第 6 節導出可檢驗的預測。第 7 節將 OPT 與競爭性框架加以比較。第 8 節討論其意涵與限制。
2. 背景與相關工作
意識的資訊理論進路。 Wheeler 的「It from Bit」命題 [7],是有序補丁理論 (OPT) 所形式化之研究綱領的奠基性前驅:物理實在並非源自物質或場的基底,而是源自觀察者所提出的二元選擇——是/否問題。OPT 承繼了這種本體論上的倒置,並補上了缺失的機制:推導出哪些資訊結構會穩定為與觀察者相容的流(穩定性濾波器),以及它們如何取得物理定律的表象(率失真壓縮)。Tononi 的整合資訊理論 [8] 以系統相對於其部分所額外生成的整合資訊 \Phi 來量化意識經驗。Friston 的自由能原理 [9] 將知覺與行動建模為變分自由能的最小化,從而對貝葉斯推論、主動推斷,以及(原則上)意識,提供統一的說明。OPT 在形式上與 FEP 相關,但其本體論起點有所不同:FEP 將生成模型視為神經架構的功能性屬性,而 OPT 則將其視為首要的形上學實體。
多重宇宙與觀察者選擇。 Tegmark 的數學宇宙假說 [10] 主張,所有在數學上自洽的結構都存在,而觀察者會發現自己位於經由自我選擇而落入的結構之中。OPT 與此觀點相容,但它提供了明確的選擇準則——穩定性濾波器——而不是讓選擇機制停留在隱含層次。Barrow 與 Tipler [4] 以及 Rees [5] 記錄了任何能支撐觀察者的宇宙都必須滿足的人擇微調限制;OPT 則將這些限制重新表述為穩定性濾波器的預測。
場論式意識模型。 Strømme [6] 近來提出一個數學框架,其中意識被視為一種基礎場 \Phi,其動力學由拉格朗日密度所支配,而其向特定組態的塌縮則用以刻畫個別心靈的湧現。OPT 對此框架採取的是比較性的對話,而非直接採納:它不承襲 Strømme 的場方程或思想算子,而是將該模型作為一種對照,用以闡明一種非還原論的本體論如何能改以資訊論的方式重建。第 4 節將此種比較性的結構映射明確化。
Kolmogorov 複雜度與理論選擇。 Solomonoff 歸納 [11] 與最小描述長度(MDL)[12] 提供了依據生成複雜度比較理論的形式框架。我們在第 5 節援引這些框架,以使簡約性主張獲得精確表述。
演化介面理論。 Hoffman 的「意識實在論」與知覺介面理論 [25] 主張,演化會塑造感官系統,使其成為一種經過簡化的「使用者介面」,以適應度回報為優先,從而遮蔽客觀實在。OPT 與其共享完全相同的前提:物理時空與物件乃是被渲染結果出的圖示(一種壓縮編解碼器),而非客觀真理。然而,OPT 在數學基礎上與其有根本分歧:Hoffman 依賴的是演化博弈論(適應度勝過真理),而 OPT 依賴的是演算法資訊理論與熱力學,並直接從為防止觀察者流發生高頻寬熱力學崩潰所必需的 Kolmogorov 複雜度界限中,推導出該介面。
3. 形式框架
3.1 演算法基底
令 \mathcal{I} 表示資訊基底——此理論的基礎性實體。我們將 \mathcal{I} 形式化時,不把它視為一個對各條路徑不加權的集合,而是視為定義在有限觀測前綴 x \in \{0,1\}^* 上的機率空間,並在下半可計算半測度類別 \mathcal{M} 上賦予一個通用混合:
\xi(x) = \sum_{\nu \in \mathcal{M}} w_\nu \nu(x), \qquad w_\nu \asymp 2^{-K(\nu)} \tag{1}
其中,K(\nu) 是半測度 \nu 的前綴柯爾莫哥洛夫複雜度。
此一表述從演算法資訊理論 [27] 建立了一個嚴格的基態。該方程式並未預設任何特定的結構定律或物理常數;相反地,它在結構上支配每一個可計算分布(\xi(x) \ge w_\nu \nu(x)),並自然地對高度可壓縮(有序)的序列賦予較高的統計權重。然而,簡單的重複序列(例如 000...)無法維持自我指涉的觀察者所需之非平衡複雜性。因此,能支撐觀察者的過程必須作為一個特定子集而存在:它們既需要足夠的演算法可壓縮性,以滿足資訊瓶頸,又需要足夠的結構豐富性(「必要多樣性」)來實現主動推斷。從哲學上看,式 (1) 將基底限制於可計算的構型,從而確保基態具有嚴格定義。
3.2 預測瓶頸與率失真
基底 \mathcal{I} 包含每一個可計算的假說,其中絕大多數都是混沌的。若要經驗到一個連續且可導航的現實,一條流必須容許一種低複雜度的預測表徵,並且這種表徵能夠通過觀察者有限的認知瓶頸。
關鍵在於,要求被壓縮的原始資料負載,並不僅僅是約 \sim 10^9 bits/s 的外感受性知覺輸入。它還涵蓋了一個龐大的前意識整合場:內部生成狀態的平行處理、長期記憶提取、恆定性先驗,以及潛意識的突觸建模。穩定性濾波器將這整個巨大而連續的平行場之序列輸出,限制進入一個單一的意識工作空間。
我們將純粹虛擬的穩定性濾波器形式化地定義為一個滿足預測資訊瓶頸 [28] 的投影邊界條件。令 \overleftarrow{Y} 為觀察者總體狀態的過去,\overrightarrow{Y} 為其未來,而 Z 為一個壓縮後的內部狀態。觀察者被定義為具有嚴格受限的每幀預測容量 B_{\max}(以每個現象幀的位元數計)以及一個離散的知覺更新窗 \Delta t,其定義了一個現象幀。現象時間即為編解碼器的幀計數 n;任何「每宿主秒的位元數」形式之速率,都是導出量 C_{\max}^H = \lambda_H \cdot B_{\max} = B_{\max}/\Delta t,其中 \lambda_H = dn/d\tau_H 是相對於宿主的幀率(關於合成觀察者的尺度化,見附錄 E-5)。這確立了每一個意識瞬間的嚴格靜態容量:每幀 B_{\max} 位元。
人類經驗校準。 對生物性人類觀察者而言,B_{\max} \approx 0.5–1.5 bits per frame,且 \Delta t \approx 50 ms,因此得到 C_{\max}^{\text{human}} \approx \mathcal{O}(10) bits/s [2, 23, 66, 67]。這個數值是以神經元放電速率運作之生物性人類的性質。它並不出現在觀察者的形式定義之中;合成觀察者則由相同的 B_{\max}/\Delta t 結構所定義,但其數值由架構導出,未必與生物性數值一致(見 §7.8、§8.14 與附錄 E-5)。
可達成的預測資訊由下式給出:
R_{\mathrm{pred}}(D) = \inf_{p(z \mid \overleftarrow{y}) \,:\, I(\overleftarrow{Y};\overrightarrow{Y} \mid Z) \le D} I(\overleftarrow{Y}; Z) \tag{2}
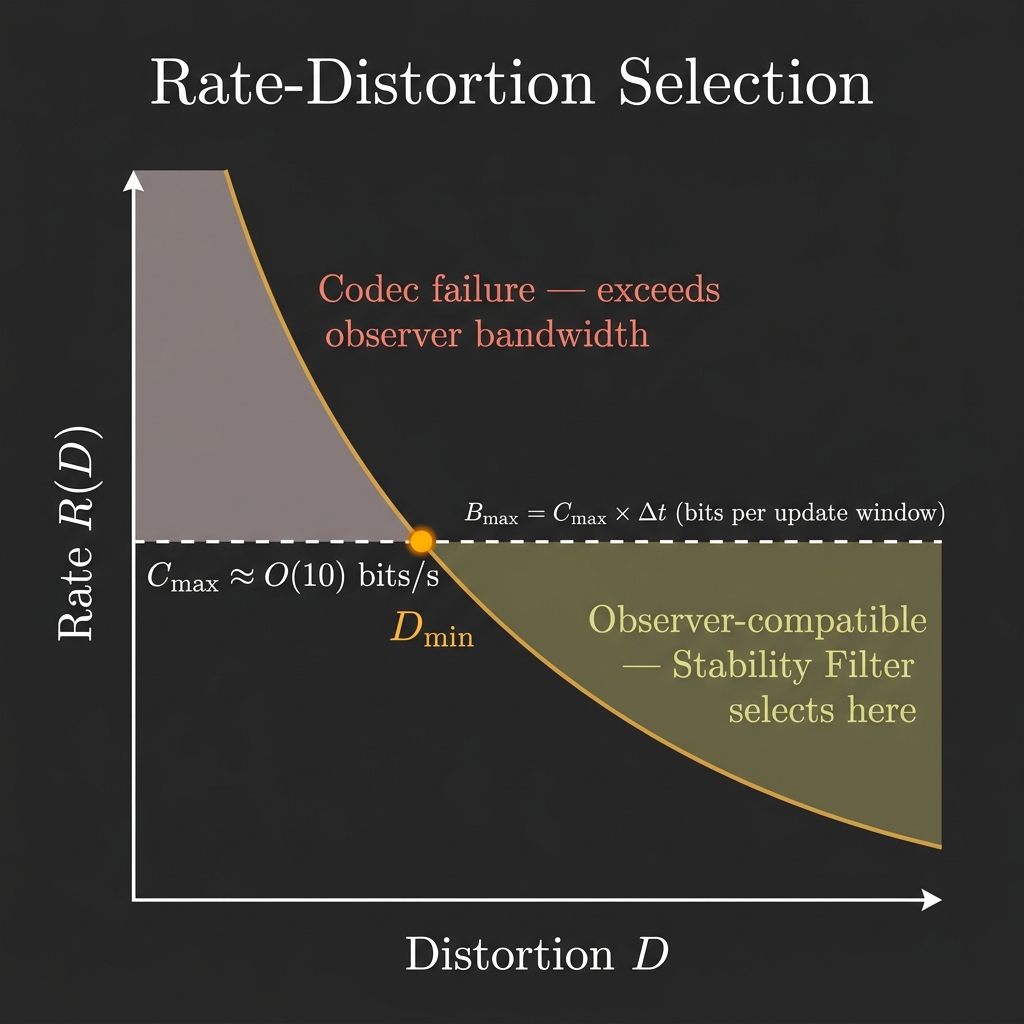
若一個過程在每個認知週期所需的預測資訊能夠容納於此緩衝之內,則它與觀察者相容:R_{\mathrm{pred}}(D_{\min}) \le B_{\max},其中 D_{\min} 是為了存活所能容忍的最大失真。這強制了維度上的嚴格性:為了在可容忍誤差內預測未來所需的總位元數,不能超過離散「當下」中實際可用的物理位元數。對於適當的平穩遍歷過程,並在精確預測極限下(D \to 0),最小的最大預測表徵 Z 可作為候選的最小充分統計量,且常會朝向 \epsilon-machine 的因果狀態分割收斂 [29]。雖然完整等價性仍需嚴格的平穩性假設,式 (2) 仍建立了一種形式上的選擇壓力,迫使現象學物理在維持因果一致性的前提下達到最大壓縮。此外,若此因果狀態空間的拓撲結構波動速度快於 \Delta t 更新窗所能追蹤的速度,則渲染結果會崩解為敘事崩解。
3.3 補丁的幾何:資訊因果錐
有序補丁理論 (OPT) 中的有序補丁,常被直觀地描述為混沌雜訊之海中的一座局部化穩定「孤島」。但這在拓撲上並不精確。為了形式化補丁的幾何,我們定義局部預測補丁模型。
令 G=(V, E) 為一個有界度數圖,表示基底中的一個局部區域。每個頂點 v \in V 都攜帶一個有限狀態 x_v(t) \in \mathcal{A},其字母表大小為 |\mathcal{A}| = q。在更新時刻 t 的完整微觀狀態為 X_t = (x_v(t))_{v \in V} \in \mathcal{A}^V。我們假設具有有限作用範圍 R 的局部隨機動力學:
p(X_{t+1} \mid X_t, a_t) = \prod_{v \in V} p_v\big(x_v(t+1) \mid X_t|_{N_R(v)}, a_t\big) \tag{3}
其中 N_R(v) 是以 v 為中心、半徑為 R 的鄰域,而 a_t 是觀察者的行動。
觀察者並不攜帶整個補丁狀態;它攜帶的是一個壓縮後的潛在狀態 Z_t \in \{1, \dots, 2^B\},其中 B = C_{\max} \Delta t。關鍵在於,觀察者是透過一個嚴格的預測瓶頸目標來選擇 Z_t:
q^\star(z \mid X_t) = \arg\min_q \Big[ I(X_t; Z_t) - \beta I(Z_t; X_{t+1:t+\tau}) \Big] \quad \text{subject to } I(X_t; Z_t) \le B \tag{4}
這就是經過剝離後的 OPT 觀察者:一個局部世界、一個有界碼,以及預測性壓縮。這形式化了因果錐的各個組成部分:
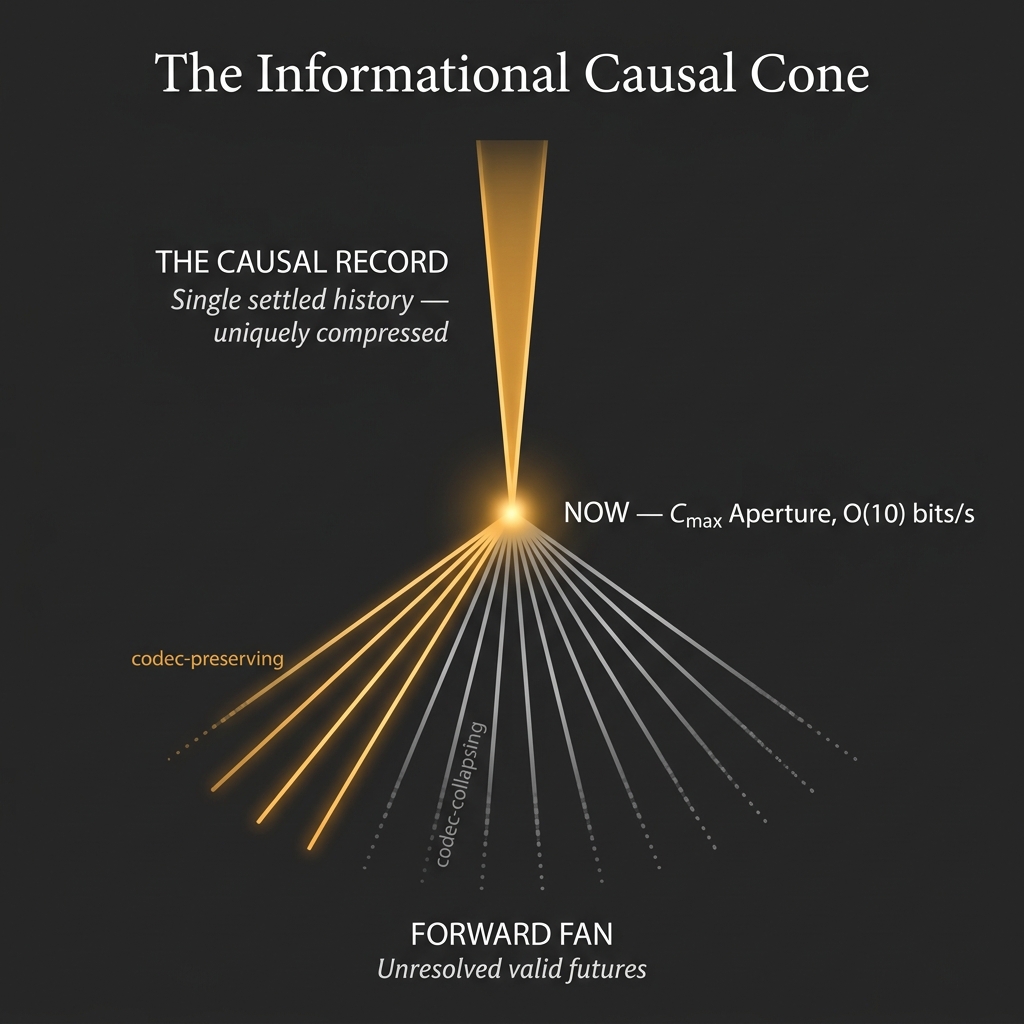
- 因果記錄 R_t = (Z_0, Z_1, \dots, Z_t):已被渲染結果的、唯一壓縮且低熵的因果歷史。
- 當前孔徑: 對局部變數施加上限的嚴格頻寬瓶頸。
- 預測分支集(\mathcal{F}_h): 多重的未來潛在序列。在時間跨度 h 上,可容許結果的集合形式上定義為:
\mathcal{F}_h(z_t) := \Big\{ z_{t+1:t+h} : p(z_{t+1:t+h} \mid z_t, a_{t:t+h-1}) > 0 \Big\} \tag{5}
由於觀察者每次更新只能解析 B 位元,因此觀察者可區分的未來數量嚴格受限於通道容量:\log |\mathcal{F}_h(z_t)| \le Bh。因此,這個分支集不僅僅是概念圖像;它是一棵受碼容量限制的分支樹。
字面意義上的資訊因果錐。 由於更新具有作用範圍 R,擾動的傳播速度不可能超過每次更新 R 個圖步。若某擾動在時間 t 的支撐集為 S,則經過 h 次更新後,\operatorname{supp}(\delta X_{t+h}) \subseteq N_{Rh}(S)。因此,「資訊因果錐」乃是局部性的直接幾何後果,對現象學傳播施加了一個有效的局部速度上限 v_{\max} = R / \Delta t。
敘事崩解。 基底的混沌並不是在空間上包圍補丁;相反地,它被包含在分支集中那些未被穿越的分支之中。由於所提取的狀態 Z_t 受到嚴格上限約束(H(Z) \le B),不穩定性必須相對於瓶頸之前、未壓縮的餘裕來評估。我們將 所需預測速率 定義為 R_{\mathrm{req}}(h, D_{\min} \mid z_t) = \frac{1}{h} \min_{p(\hat{X} \mid Z_t) : \mathbb{E}[d(X, \hat{X})] \le D_{\min}} I(X_{\partial_R A}(t+1:t+h) ; \hat{X}_{t+1:t+h} \mid Z_t),即在最大可容忍失真下,追蹤尚未解決的物理邊界狀態所需的最小資訊速率。這使穩定性濾波器的選擇準則更為精確:(a) 若 R_{\mathrm{req}} \le B,觀察者便能維持一條已解析的敘事;(b) 若 R_{\mathrm{req}} > B,則未壓縮的預測分支集會超過瓶頸容量,迫使觀察者將分支集粗粒化為無法解碼的靜態雜訊,而敘事穩定性也隨之失效。觀察者的連續經驗,就是孔徑向這個分支集推進的過程;在現象學上,它將其中一條分支編入因果記錄,同時不超出 B。
敘事漂移(其慢性互補型態)。 前述界定的是一種急性失效模式:R_{\mathrm{req}} 超過 B,而編解碼器經歷災難性的連貫性崩潰。另有一種互補的慢性失效模式,且不會觸發任何失效訊號。若輸入流 X_{\partial_R A}(t) 被某個外部機制 \mathcal{F} 系統性地預先濾除——產生一個經過策展的訊號 X' = \mathcal{F}(X),其內部一致,但排除了真實的基底資訊——則編解碼器將表現出低預測誤差 \varepsilon_t、執行高效率的維護週期,並滿足 R_{\mathrm{req}} \le B,同時卻在關於基底的判斷上系統性地出錯。關鍵在於,依照既有定義,穩定性濾波器無法區分這些情形:可壓縮性對保真度是中立的。隨著時間推移,MDL 剪枝步驟(§3.6.3,式 T9-3)會正確地刪除那些不再能預測該濾波流的編解碼器組件,從而不可逆地削弱編解碼器對被排除訊號的建模能力(附錄 T-12,定理 T-12)。這種抹除具有自我強化性:被剪枝後的編解碼器將不再能偵測自身能力的喪失(定理 T-12a,不可判定性極限)。其結構性防禦,乃是穿越馬可夫毯 \partial_R A 的 \delta-獨立輸入通道之冗餘性(定理 T-12b,基底保真條件)。完整的形式化處理見附錄 T-12;其倫理後果——包括比較器階層與腐化判據——則見配套倫理論文 [SW §V.3a, §V.5]。
3.4 補丁動力學:推斷與熱力學
在一個已被選出的補丁內,物理定律的結構並非被形式化為決定論映射,而是被形式化為一個支配預測狀態 z 的有效隨機核:
z_{t+1} \sim K_\theta(\cdot \mid z_t, a_t), \qquad y_{t+1} \sim O_\theta(\cdot \mid z_{t+1}) \tag{6}
將觀察者與周遭資訊混沌區分開來的邊界,被定義為一個資訊性的馬可夫毯,其對應於一個觀察者補丁 A \subset V。在此邊界內部的動力學——亦即代理體對補丁所作的近似——由自由能原理下的主動推斷所支配 [9]。
我們可以藉由預測切割熵,形式化地定義此一界限能力:
S_{\mathrm{cut}}(A) := I(X_A ; X_{V \setminus A}) \tag{7}
若假設所選補丁在某一時間切片上局部滿足馬可夫性,則邊界殼層 \partial_R A 會嚴格地將內部 A^\circ 與外部 V \setminus A 屏蔽開來,使得 X_{A^\circ} \perp X_{V\setminus A} \mid X_{\partial_R A}。因此:
S_{\mathrm{cut}}(A) = I(X_{\partial_R A} ; X_{V \setminus A}) \le H(X_{\partial_R A}) \le |\partial_R A| \log q \tag{8}
由於 Z_t 是對 X_A 的一種容量受限壓縮,資料處理不等式保證 I(Z_t ; X_{V \setminus A}) \le |\partial_R A| \log q。若基底圖 G 近似於一個 d 維晶格,則 |\partial_R A| \sim \operatorname{area}(A),而非體積。
因此,OPT 嚴格地導出一條真正的經典邊界律 [39]。我們可以為未來的結構升級建構一個形式化的認識論階梯: 1. 經典面積律:S_{\mathrm{cut}} \sim |\partial_R A|,純粹由局域性與馬可夫屏蔽導出。 2. 量子升級:唯有當粗粒化的預測變數 Z_t 容許一種形式上的希爾伯特空間/量子糾錯碼嵌入時,馮紐曼糾纏熵的尺度律才會變得可及。 3. 全像升級:唯有當我們以階層式張量網路取代瓶頸編解碼器 Z_t,並將 S_{\mathrm{cut}} 重新詮釋為幾何最小割時,真正的幾何全像對偶才會出現。
藉由先行確立經典邊界律,OPT 提供了一個強而有力的數學底線——其成立條件是馬可夫屏蔽假設(X_{A^\circ} \perp X_{V \setminus A} \mid X_{\partial_R A})——使更具推測性的量子形式主義得以在其上被安全地建構。
觀察者的作用可透過變分自由能 F[q, \theta] 形式化:
F[q,\theta] = \mathbb{E}_q[-\log p_\theta(y_{1:T}, z_{1:T} \mid a_{1:T})] + \mathbb{E}_q[\log q(z_{1:T})] \tag{9}
關鍵在於,這裡強制了一種嚴格的數學分離:基底先驗決定假設空間,虛擬的穩定性濾波器 (4) 為容量相容的結構設下界限,而 FEP (9) 則支配該受限結構內部的代理體層級推斷。物理並不是作為自由能泛函本身而湧現;它是自由能泛函得以成功追蹤的那個穩定結構 K_\theta。
此外,維持此一有意識的渲染結果會帶來不可避免的熱力學代價。依據蘭道爾原理 [52],每一次邏輯上不可逆的位元抹除,至少都會耗散 k_B T \ln 2 的熱。若將每次瓶頸更新對應為一次不可逆抹除(這是最佳情況下的記帳假設),則意識之物理足跡所需的最小耗散為:
P_{\text{render}} \ge \dot{N}_{\text{erase}} \cdot k_B T \ln 2 \ge C_{\max} \cdot k_B T \ln 2 \tag{10}
這是一個在每次更新一次抹除之記帳方式下的最佳情況下界——而不是僅由頻寬本身導出的普遍結果。所得界限(\sim 10^{-19} W)遠低於實際神經耗散(約 20W),這反映出生物學實作所伴隨的巨大熱力學額外負擔。式 (10) 確立了任何實例化一個受 C_{\max} 約束之有意識渲染結果的基底,其最小可能物理足跡所對應的嚴格理論底線。
(註:前述熱力學與資訊論界限,嚴格支配的是即時更新頻寬 C_{\max}。然而,這尚不足以捕捉觀察者常駐狀態的完整經驗維度,也未說明編解碼器如何在深時尺度上管理其自身複雜性。這些結構機制——豐富經驗的現象狀態張量表述,以及睡眠/作夢的主動維護週期——將在下文 §3.5 與 §3.6 中完整推導。)
3.5 現象狀態張量與預測不對稱性
3.5.1 經驗密度之謎
§§3.1–3.4 的形式裝置,已成功透過容量上限 C_{\max} \approx \mathcal{O}(10)
bits/s,約束有意識觀察者的更新吞吐量。
然而,現象經驗立即呈現出一個結構性難題:單一視覺瞬間所感受到的豐富性——色彩、深度、紋理、聲音、本體感覺與情感的同時在場——遠遠超出
C_{\max} 在任何單一更新視窗 \Delta t \approx 50\ \text{ms}
中所能傳遞的資訊內容。
每個意識瞬間所能解析的最大新資訊量為:
B_{\max} = C_{\max} \cdot \Delta t \approx 10\ \text{bits/s} \times 0.05\ \text{s} = 0.5\ \text{bits} \tag{T8-1}
這甚至遠低於每個知覺畫格中一個 bit 的真正新穎資訊,然而現象場景卻顯得具有高度資訊密度。若要在不擴張狹窄更新頻寬的前提下化解此一落差,我們就必須明確區分兩個在結構上彼此不同的量: 1. C_{\max} —— 更新吞吐量:單位時間內,被解析並納入既定因果記錄的預測誤差信號速率。 2. C_{\text{state}} —— 常駐狀態複雜度:當前已載入並處於活躍狀態之生成模型的柯爾莫哥洛夫複雜度 K(P_\theta(t))。
兩者並不是同一個量。C_{\max} 支配的是閘門;C_{\text{state}} 刻畫的則是房間。本節其餘部分將精確化這項區分,並引入現象狀態張量 P_\theta(t),作為對應於常駐內在場景的形式對象。
3.5.2 預測不對稱性:向上誤差與向下預測
OPT 承襲了預測處理架構(Clark [82]、Hohwy [83];見 §7.3),在此架構中,編解碼器 K_\theta 作為一個階層式生成模型運作。在這個架構下,兩種彼此區別的資訊流會同時穿越馬可夫毯 \partial_R A:
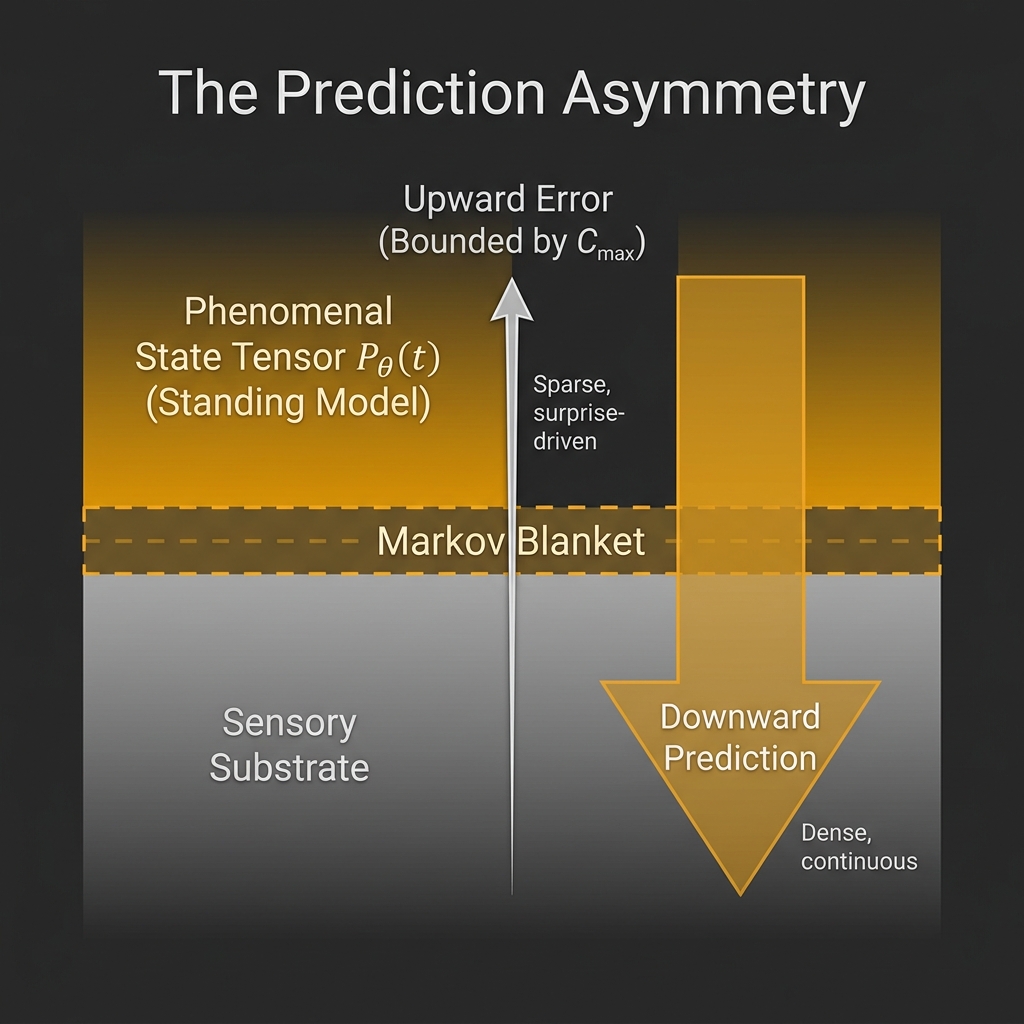
向上流(預測誤差,\varepsilon_t): 指 K_\theta 當前預測與抵達 \partial_R A 的感官訊號之間的不匹配。這是校正訊號。它是稀疏的、由驚異所驅動,且在容量上受到嚴格限制。
向下流(預測,\pi_t): 指生成模型對預期感官狀態所進行的主動渲染結果,並由較高層級向較低層級傳播。這就是場景本身。它是稠密的、連續的,並取自 K_\theta 的完整參數化。
形式上,令感官邊界狀態為 X_{\partial_R A}(t),並令編解碼器所預測的邊界狀態為:
\pi_t := \mathbb{E}_{K_\theta}\!\left[X_{\partial_R A}(t) \mid Z_t\right] \tag{T8-2}
則預測誤差為:
\varepsilon_t := X_{\partial_R A}(t) - \pi_t \tag{T8-3}
C_{\max} 所限制的是誤差信號,而非預測本身。 誤差信號與瓶頸狀態之間的互資訊滿足:
I(\varepsilon_t\,;\,Z_t) \leq C_{\max} \cdot \Delta t = B_{\max} \tag{T8-4}
相較之下,預測 \pi_t 是由完整的生成模型所給出,並不承受此類限制。它的資訊內容僅受 K_\theta 自身複雜度所約束。這種不對稱性,正是區分現象豐富性與更新頻寬的形式基礎。
3.5.3 定義:現象狀態張量 P_\theta(t)
我們將現象狀態張量 P_\theta(t) 原生地定義為:在時間 t,為了穿越馬可夫毯進行投射而部署之生成模型的完整常駐活躍參數子集:
P_\theta(t) := \bigl\{\, K_\theta(\cdot,\, \cdot) \,\bigr\}_{\text{active}} \tag{T8-5}
也就是說,P_\theta(t) 是編解碼器當前所保持、隨時可用以對可觀測邊界狀態 X_{\partial_R A} 生成預測的完整參數化架構;其評估獨立於壓縮潛在狀態 Z_t 與動作 a_t 的任何單一具體實例。其結構複雜度自然可由此一當前常駐參數配置的柯爾莫哥洛夫複雜度來表徵:
C_{\text{state}}(t) := K\!\left(P_\theta(t)\right) \tag{T8-6}
其中,K(\cdot) 表示前綴柯爾莫哥洛夫複雜度。C_{\text{state}}(t) 即為常駐狀態複雜度——亦即編解碼器目前以活躍部署形式所持有之壓縮結構的位元數。
邊界通道流的上界。 瓶頸狀態與邊界之間的互資訊受到標準香農不等式的約束 [16](基礎論文式 8):
I\!\left(Z_t\,;\,X_{\partial_R A}\right) \leq H\!\left(X_{\partial_R A}\right) \leq |\partial_R A|\cdot \log q \tag{T8-7}
這對穿越馬可夫毯的通道流給出了上界——其量級可遠大於 B_{\max}。重要但書: 這裡的上界是針對香農理論意義下的互資訊 I(Z_t\,;\,X_{\partial_R A}),而不是針對常駐模型之柯爾莫哥洛夫複雜度 K(P_\theta(t)) 的上界。香農熵量化的是整體平均不確定性;柯爾莫哥洛夫複雜度量化的則是某一特定可計算對象的描述長度。在沒有額外假設的情況下(例如對模型類別施加通用先驗),不存在可普遍連接這兩類量的通用不等式。因此,我們不主張 C_{\text{state}} \leq H(X_{\partial_R A})。常駐狀態複雜度 C_{\text{state}} 的上界是經驗性地界定的(§3.10),而非由邊界熵所給定。
C_{\text{state}} 的啟發式下界。 穩定性濾波器所直接約束的只有更新速率 R_{\text{req}} \leq B_{\max},而非常駐模型的深度。然而,若一個編解碼器缺乏足夠的結構複雜度,它便無法在預測分支集 \mathcal{F}_h(z_t) 上,生成能夠匹配複雜環境統計結構的精確預測 \pi_t。這對 C_{\text{state}} 施加了一個實際上的最低要求:低於某個門檻時,由於預測誤差 \varepsilon_t 會持續偏大,R_{\text{req}} 將系統性地超過 B_{\max}。這一下界是由經驗動機所支持,而非形式推導所得——目前尚無封閉形式的表達式可寫成 C_{\text{state}} \geq f(R_{\text{req}}, \text{environment statistics})。
實體化與傾向性詮釋(開放問題)。 如上所定義的 P_\theta(t) 容許兩種詮釋,而本框架目前尚未在形式上將其區分開來:(a) 實體化詮釋:P_\theta(t) 是一種稠密、瞬時載入的表徵,其豐富性在每一幀中都以活躍形式存在;以及 (b) 傾向性詮釋:P_\theta(t) 是一種生成性的能力——一個常駐程式,可在需要時將場景渲染結果出來,而非其全部內容都在查詢與回應之間被實體化。這兩種詮釋都與上述邊界通道與啟發式下界條款相容,也都與 §3.5.6 的經驗性承諾相容:豐富性與 K(K_\theta) 相關,而非與更新頻寬相關。兩者的差異在於「已載入」究竟意味著什麼,以及在直接探測 K(P_\theta) 時究竟應測量何者。單靠柯爾莫哥洛夫複雜度並不足以區分兩者:一個小的 K(P_\theta) 仍可支撐高邏輯深度、大規模查詢—回應能力,或長時間執行後的展開。我們在此採納傾向性詮釋作為標準解讀——P_\theta(t) 是可供查詢/渲染結果場景之活躍傾向性生成狀態,而不必然是一個已完全實體化的稠密場景對象——同時將實體化詮釋標示為一種競爭性的操作化方案,留待未來的經驗研究加以裁定。
3.5.4 Block 區分作為一項結構推論
P_\theta(t) 與 Z_t 之間的形式區分,精確對應於 Ned Block 對現象意識(P-consciousness)與取用意識(A-consciousness)的區分 [47]:
| Block 的類別 | OPT 物件 | 資訊內容 | 受頻寬限制? |
|---|---|---|---|
| P-consciousness(感質、被感受到的場景) | P_\theta(t) | C_{\text{state}} = K(P_\theta(t)) \gg B_{\max} | 否 |
| A-consciousness(可報告內容) | Z_t | B_{\max} = C_{\max} \cdot \Delta t \approx 0.5\ \text{bits} | 是 |
在 OPT 之下,P-consciousness 是由完整張量 P_\theta(t) 所給出的向下預測 \pi_t。A-consciousness 則是瓶頸輸出 Z_t——亦即場景中那一薄層,已被充分壓縮,得以進入因果記錄 \mathcal{R}_t,並成為可供報告的內容。視覺瞬間所感受到的豐富性屬於 P_\theta(t);而能夠說出「我看見紅色」,則要求該特徵通過 Z_t。
這項推論化解了一個表面上的悖論:何以一個豐富的現象場景,能由一條低於 1 bit 的更新通道維持。答案是,該場景並不是在每一幀都經由通道被傳送進來——它是早已載入於 P_\theta(t) 之中。通道所做的,是逐幀、漸進且選擇性地更新它。
3.5.5 P_\theta(t) 的更新動力學
P_\theta(t) 的更新規則,由經瓶頸濾過的預測誤差信號 \varepsilon_t 所支配:
P_\theta(t+1) = \mathcal{U}\!\left(P_\theta(t),\, \varepsilon_t,\, Z_t\right) \tag{T8-8}
其中,\mathcal{U} 是編解碼器的學習算子——以主動推斷的術語來說,即變分自由能 \mathcal{F}[q, \theta](基礎論文式 9)上的梯度步,但受容量約束 I(X_t\,;\,Z_t) \leq B 所限制。
其關鍵的結構性質在於,\mathcal{U} 是選擇性的:只有 P_\theta(t) 中那些被當前預測誤差 \varepsilon_t 所牽涉的區域會被更新。其餘既存張量的部分,則在該幀內保持不變。這賦予意識瞬間其特有的結構:一個穩定的現象背景,其上鋪陳著一小片已被解析的新奇前景。
因此,編解碼器實作了一種在稠密先驗上的稀疏更新——這是一項設計原則,使每單位更新頻寬所能維持的現象連貫性達到最大。
3.5.6 範圍與認識論地位
現象狀態張量 P_\theta(t),乃是對現象場景必須投下之結構性陰影的形式化刻畫,且此刻畫與能動性公理(§3.6)相容。它並不解決意識的難問題。有序補丁理論 (OPT) 仍將現象意識視為不可化約的原初項;P_\theta(t) 所規定的是容器的幾何,而非其內容的本性。
此一主張是結構性的,並且可依下述意義加以證偽:若被報告經驗的質性豐富度(例如,透過心理物理任務中現象複雜性的測量來操作化)與編解碼器深度——亦即 K_\theta 的階層複雜性,且可藉由預測階層的神經標記加以測量——相關,而非與更新頻寬 C_{\max} 相關,則 P_\theta\,/\,Z_t 的區分便獲得經驗支持。迷幻狀態會顯著改變 K_\theta 的結構,卻不會穩定地改變行為吞吐量,因此構成一個自然的測試領域。
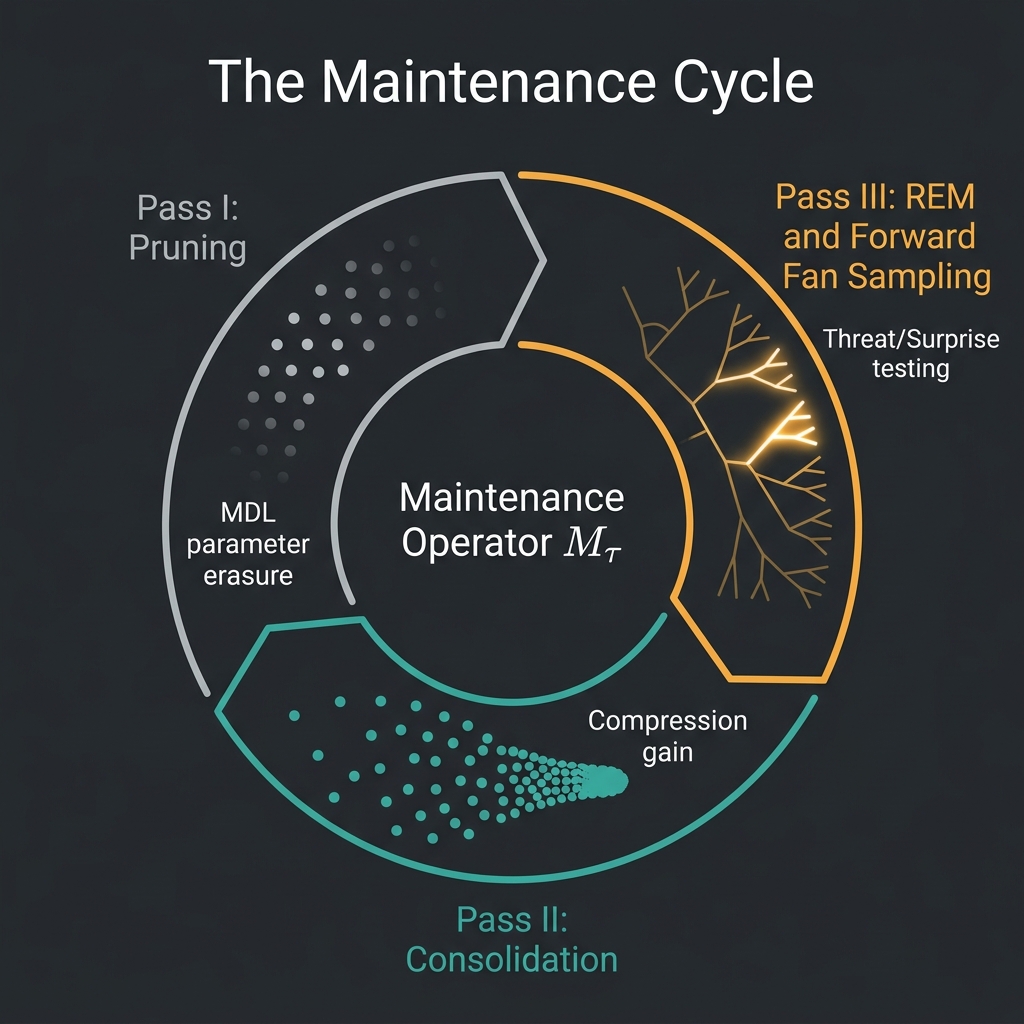
3.6 編解碼器生命週期:維護週期算子 \mathcal{M}_\tau
3.6.1 靜態編解碼器問題
§§3.1–3.5 的理論框架將 K_\theta 及其實現 P_\theta(t) 視為會隨更新幀而動態變化,但它同時也隱含假定編解碼器的結構架構——亦即參數空間 \Theta 本身——是固定的。這對於分析單一意識時刻的共時性結構而言已屬充分,但對於建立一個跨越深層時間的意識理論而言則並不足夠。
一個持續運作的編解碼器會累積結構複雜性:每一個習得的模式都會為 K_\theta 增添參數,從而提高 C_{\text{state}}(t)。若沒有受控的複雜性削減機制,C_{\text{state}} 便會單調增長,直到編解碼器超出其熱力學可運行性上限——也就是說,維持 P_\theta(t) 的代謝成本超過有機體的能量預算,或 K_\theta 的內部複雜性超出穩定性濾波器所能容納的相容描述長度。
本節引入維護週期算子 \mathcal{M}_\tau——這是一種形式機制,說明編解碼器如何在時間中管理其自身複雜性,且主要在感官負載降低的狀態下運作(其典型範例即為:睡眠)。
3.6.2 維護條件
將編解碼器可運行條件定義為如下要求:當前生成模型的柯爾莫哥洛夫複雜度,必須維持在由有機體熱力學預算所設定的結構性上限 C_{\text{ceil}} 之下:
K\!\left(P_\theta(t)\right) \leq C_{\text{ceil}} \tag{T9-1}
C_{\text{ceil}} 與 C_{\max} 並不相同。前者是一個大得多的量——亦即編解碼器在其參數空間中所能維持的總體結構複雜度——但它仍然是有限的。對 (T9-1) 的違反,對應於認知過載、記憶干擾,以及最終博爾赫斯 [53] 在〈記憶天才富內斯〉中所描述的病理性情形:一個系統獲得了過多未壓縮的細節,以致再也無法進行預測性運作。
維護週期算子 \mathcal{M}_\tau 被定義為在 R_{\text{req}} \ll C_{\max} 的時段中起作用——更具體地說,是在所需預測速率下降到足夠低,以致釋放出的頻寬可以重新導向內部重組之時:
\mathcal{M}_\tau : P_\theta(t) \;\longrightarrow\; P_\theta(t + \tau) \qquad \text{during} \quad R_{\text{req}}(t) \ll C_{\max} \tag{T9-2}
\mathcal{M}_\tau 可分解為三個在結構上彼此不同的通道,各自針對編解碼器複雜度管理的不同面向。
3.6.3 第一階段——剪枝(將遺忘視為主動的 MDL 壓力)
第一階段將最小描述長度(MDL)壓力施加於當前的編解碼器參數。對生成模型 K_\theta 的每個組件 \theta_i,將其 預測貢獻 定義為:它對未來觀測流所提供的互資訊,扣除保留該組件所需的儲存成本後的淨值:
\Delta_{\mathrm{MDL}}(\theta_i) := I\!\left(\theta_i\,;\,X_{t+1:t+\tau} \mid \theta_{-i}\right) - \lambda \cdot K(\theta_i) \tag{T9-3}
其中,\theta_{-i} 表示除 \theta_i 之外的所有參數,\lambda 是保留閾值(每增加 1 bit 模型複雜度所能換得的未來預測 bit 數),而 K(\theta_i) 則是該組件的描述長度。
剪枝規則為:
\text{Prune } \theta_i \quad \text{if} \quad \Delta_{\mathrm{MDL}}(\theta_i) < 0 \tag{T9-4}
也就是說,當 \theta_i 每單位儲存 bit 所帶來的預測貢獻低於閾值 \lambda 時,便將其捨棄。這裡的遺忘被形式化為的不是失敗,而是 在熱力學上合理的抹除:每一個被剪除的組件,都會回收 K(\theta_i) bit 的模型容量以供再利用。
依據蘭道爾原理(Landauer’s Principle)[52],每一次剪枝操作都為抹除設定了一個熱力學下限:
W_{\text{prune}}(\theta_i) \geq K(\theta_i) \cdot k_B T \ln 2 \tag{T9-5}
雖然實際的生物代謝因龐大的實作額外負擔而遠高於這個理論最小值數個數量級(瓦特相對於飛瓦),但這種成本的 結構性必然性 依然存在。班奈特(Bennett)對蘭道爾的補充 [92] 進一步將此點說得更精確:在原理上,邏輯可逆計算可以逼近零耗散,因此蘭道爾下限所約束的,特別是 抹除,而不是預測或轉換。故而,在維護週期中,具有熱力學上不可約性的步驟是剪枝階段——而非預測階段。因此,在有序補丁理論 (OPT) 中,睡眠帶有一種根本的熱力學特徵:它是一段淨 資訊抹除 的時期,其能量成本是由物理學所強制規定,而不僅僅是生物效率低落的結果。
剪枝階段的總體複雜度降低量為:
\Delta K_{\text{prune}} = \sum_i K(\theta_i)\cdot \mathbf{1}\!\left[\Delta_{\mathrm{MDL}}(\theta_i) < 0\right] \tag{T9-6}
3.6.4 第二階段 —— 鞏固(將學習視為壓縮增益)
修剪階段會移除預測回報不足的組件。鞏固階段則會將剩餘組件重新組織為更高壓縮的表徵。
在清醒運作期間,編解碼器是在即時壓力下獲取模式:每次更新都必須在 \Delta t 內完成,因此沒有時間對 K_\theta 進行整體性的結構重組。新近獲得的模式會以相對未壓縮的形式儲存——就其所提供的預測貢獻而言,具有較高的 K(\theta_{\text{new}})。鞏固階段會對這些近期獲得的內容施加離線 MDL 壓縮。
令 \Theta_{\text{recent}} \subset \Theta 表示自上一次維護週期以來所獲得的參數集合。鞏固算子會尋找 \Theta_{\text{recent}} 的最小複雜度重參數化 \theta',使其所生成的預測分布與原始分布之間的失真維持在可容忍的 D_c 範圍內:
\theta'_{\text{cons}} = \arg\min_{\theta'} K(\theta') \quad \text{s.t.} \quad D_{\mathrm{KL}}\!\left(P_{\theta'}(\cdot) \,\Big\|\, P_{\Theta_{\text{recent}}}(\cdot)\right) \leq D_c \tag{T9-7}
所回收的壓縮增益為:
\Delta K_{\text{compress}} = K(\Theta_{\text{recent}}) - K(\theta'_{\text{cons}}) \tag{T9-8}
\Delta K_{\text{compress}} 是透過將近期經驗重組為更有效率的表徵,而回收的模型容量位元數。\Delta K_{\text{compress}} 的每一個單位,都會直接降低未來在相似環境中的 R_{\text{req}}——編解碼器在熟悉領域中的運行成本會變得更低。
這將慢波睡眠期間海馬體—新皮質記憶鞏固的經驗性觀察功能形式化了:從高頻寬的情節性儲存(海馬體,高 K)轉移到壓縮後的語意性儲存(新皮質,低 K),正是式 (T9-7) 所描述的壓縮操作。其預測是,壓縮增益 \Delta K_{\text{compress}} 應當與睡眠後在涉及結構化模式辨識任務上所觀察到的行為改善程度呈現相關。
3.6.5 第三階段——預測分支集取樣(作夢作為對抗式自我測試)
第三階段主要在 REM 睡眠期間運作,此時感覺輸入會被主動閘控,而運動輸出則受到抑制。在這些條件下,R_{\text{req}} \approx 0:編解碼器不再接收來自外部環境的校正訊號。完整的頻寬預算 C_{\max} 因而可供內部運作使用。
OPT 將此狀態形式化為無約束的預測分支集探索:編解碼器在 \mathcal{F}_h(z_t) 中生成軌跡——亦即容許的未來序列之集合(基礎論文式 5)——而不將這些軌跡錨定於真實流入的資料。這就是模擬:編解碼器讓其生成模型 K_\theta 沿時間向前運行,不受現實阻礙。
在該分支集上的取樣分布並非均勻。定義分支 b \in \mathcal{F}_h(z_t) 的重要性權重為:
w(b) := \exp\!\left(\beta\cdot |E(b)|\right) \tag{T9-9}
其中,\beta 是逆溫參數,而 E(b) 是該分支的情緒效價,定義為:
E(b) := -\log P_{K_\theta}(b \mid z_t) + \alpha \cdot \mathrm{threat}(b) \tag{T9-10}
第一項 -\log P_{K_\theta}(b \mid z_t) 是該分支在當前編解碼器之下的負對數機率——亦即其驚異值。第二項 \mathrm{threat}(b) 則是與適存相關的後果度量,其形式化定義為:若編解碼器穿越分支 b,所需預測速率的期望增量:
\mathrm{threat}(b) := \mathbb{E}\!\left[\, R_{\text{req}}(D_{\min} \mid b) - R_{\text{req}}(D_{\min} \mid z_t)\,\right] \tag{T9-10a}
也就是說,\mathrm{threat}(b) 量化了這樣的程度:若分支 b 在清醒生活中被實現,它會如何透過身體傷害、社會斷裂,或迫使模型進行高成本修訂的敘事崩解,將編解碼器推向甚至推過其頻寬上限 B_{\max}。凡滿足 \mathrm{threat}(b) > B_{\max} - R_{\text{req}}(D_{\min} \mid z_t) 的分支,都構成存在性威脅:它們將違反穩定性濾波器條件。加權參數 \alpha \geq 0 控制在取樣分布中,後果相對於驚異所具有的影響力。
取樣算子會依照與 w(b) 成比例的機率抽取分支:
b_{\text{sample}} \sim \mathcal{F}_h(z_t) \quad \text{with probability} \propto w(b) \tag{T9-11}
這實現了重要性加權的預測分支集取樣:編解碼器會不成比例地反覆演練那些不是高度令人驚異、就是高度後果重大的分支,而不論其基準發生機率為何。低機率但高威脅的分支——恰恰是編解碼器準備最不足的那些——會獲得最高的取樣注意力。
接著,每一個被取樣的分支都會在 K_\theta 之下接受連貫性評估。凡是產生不連貫預測序列的分支——亦即編解碼器自身的生成模型無法維持敘事穩定性的情況——都會被辨識為脆弱點:在預測分支集中,若於清醒生活中遭遇該分支,編解碼器便會失效的區域。如此一來,編解碼器便能在真正暴露於這些情況、承擔真實熱力學代價之前,先更新 P_\theta,以降低 K_\theta 在那些點上的脆弱性。
因此,作夢就是在零風險條件下,對編解碼器進行對抗式自我測試。其功能性後果是:編解碼器會系統性地更充分準備好面對其自身預測分支集中那些低機率、高後果的分支。這種 OPT 架構為 Revonsuo 的 [46] 夢之威脅模擬理論提供了資訊理論上的奠基,並將其從演化功能性的說明,擴展為一種形式上的結構必然性:任何在穩定性濾波器之下運作的編解碼器,都必須定期對其自身的預測分支集進行壓力測試,而離線維護狀態則是唯一能在不付出真實世界熱力學成本的情況下完成此事的時段。
情緒標記作為保留權重先驗。 在清醒狀態中,於 REM 取樣期間計算出的情緒效價 E(b),會作為一種先驗保留權重,對 (T9-3) 中的 MDL 閾值 \lambda 施加偏置。具有高 |E(b)| 的經驗——亦即高度令人驚異或後果重大的經驗——會被賦予較高的有效 \lambda,使其在下一個維護週期中更不易遭到剪除。這就是情緒增強記憶的形式化說明:情感並不是污染記憶系統的雜訊;它是編解碼器的相關性訊號,用來標記那些其預測價值超過其基準統計頻率的模式。
3.6.6 完整維護週期與淨複雜度預算
\mathcal{M}_\tau 的三個通道依序組合。其對於歷時 \tau 的單一維護週期中編解碼器複雜度的淨效應為:
K\!\left(P_\theta(t+\tau)\right) = K\!\left(P_\theta(t)\right) - \Delta K_{\text{prune}} - \Delta K_{\text{compress}} + \Delta K_{\text{REM}} \tag{T9-12}
其中,\Delta K_{\text{REM}} 是來自 REM 取樣通道中新近鞏固之模式的小幅正增量——亦即那些脆弱點修復所需的新參數更新。
對於一個跨越多年運作的穩定認知系統而言,長期預算必須滿足:
\left\langle \Delta K_{\text{prune}} + \Delta K_{\text{compress}} \right\rangle \geq \left\langle \Delta K_{\text{waking}} + \Delta K_{\text{REM}} \right\rangle \tag{T9-13}
其中,\Delta K_{\text{waking}} 是在此前清醒期間所獲得的複雜度。不等式 (T9-13) 的正式表述是:維護必須跟上獲取的速度。以有序補丁理論 (OPT) 的術語來說,慢性睡眠剝奪不僅僅是疲勞——它是持續進展的複雜度溢出:編解碼器逼近 C_{\text{ceil}},而其修剪與鞏固預算卻不足以恢復餘裕。
3.6.7 經驗性預測
維護週期框架產生如下可檢驗的結構性預期:
睡眠時長會隨編解碼器複雜度而擴展。 在清醒期間獲取更多結構化資訊的生物體或個體,應當需要相應更長或更深的維護週期。此一預測不只是說高強度認知工作需要更多睡眠(這一點已被確立),而是說學習的類型也很重要:富含模式、可壓縮的學習,所需的鞏固時間應少於非結構化、高熵的經驗,因為在前一種情況下,\Delta K_{\text{compress}} 較大。
REM 內容在預測分支集上是依重要性加權,而非依頻率加權。 相較於其在清醒狀態中的出現頻率,夢境內容應會不成比例地抽樣那些低機率但高後果的分支。這與夢境報告中威脅、社會衝突與新奇環境內容在經驗上的顯著優勢相一致——編解碼器抽樣的是它需要用來進行壓力測試的內容,而不是它最常遭遇的內容。
睡後壓縮效率的改善,與 \Delta K_{\text{compress}} 成正比。 更具體的預測是:睡眠後的表現提升,應當在那些需要結構性泛化的任務上最為顯著(亦即,將一條已壓縮的規則應用到新實例),而非僅僅重複既有操作——因為 \Delta K_{\text{compress}} 的作用,正是將 \Theta_{\text{recent}} 重新組織為更可泛化的形式。
病理性反芻對應於卡在高-|E| 分支上的 REM 抽樣。 若重要性加權參數 \beta 病理性地升高,則在 \mathcal{F}_h(z_t) 上的抽樣分布會集中於高威脅分支,並排除修復過程。編解碼器會在其維護週期中反覆抽樣同一批具威脅性的分支,卻無法成功降低其驚異值——這正是焦慮與 PTSD 惡夢的形式結構。
3.6.8 與現象狀態張量的關係
如 §3.5 所定義,\mathcal{M}_\tau 作用於 P_\theta(t):它在維護視窗期間重組常駐狀態複雜度 C_{\text{state}}。P_\theta(t) 在 \mathcal{M}_\tau 之下的時間輪廓為:
- 清醒期的獲取: 隨著新模式被納入 K_\theta,C_{\text{state}} 以受學習算子 \mathcal{U}(式 T8-8)所界定的速率增加。
- 慢波睡眠(Passes I–II): 隨著修剪與鞏固回收模型容量,C_{\text{state}} 下降。
- REM(Pass III): C_{\text{state}} 在脆弱點上經歷選擇性的局部增加,但其淨效應相較於 Passes I–II 的下降幅度仍然很小。
與各階段相對應的意識經驗也與此結構一致:清醒生活累積了 P_\theta(t) 的豐富性;慢波睡眠在現象上稀薄或缺席(這與結構重組期間 P_\theta(t) 的活化最小相一致);REM 則呈現出在現象上鮮明、但由內部生成的場景(即在缺乏感官校正的情況下,由 Pass III 將完整生成模型向前運行)。
摘要:新引入的形式物件
| 符號 | 名稱 | 定義 | 方程式 |
|---|---|---|---|
| P_\theta(t) | 現象狀態張量 | 時間 t 時 K_\theta 的完整活化,經由 \partial_R A 投影 | T8-5 |
| C_{\text{state}}(t) | 穩態複雜度 | K(P_\theta(t)),活躍編解碼器的柯爾莫哥洛夫複雜度 | T8-6 |
| \pi_t | 向下預測 | \mathbb{E}_{K_\theta}[X_{\partial_R A}(t) \mid Z_t],即渲染結果場景 | T8-2 |
| \varepsilon_t | 預測誤差(向上) | X_{\partial_R A}(t) - \pi_t,受 C_{\max} 約束的新穎性訊號 | T8-3 |
| \mathcal{M}_\tau | 維護週期算子 | 在低 R_{\text{req}} 下,P_\theta(t) \to P_\theta(t+\tau) | T9-2 |
| \Delta_{\mathrm{MDL}}(\theta_i) | MDL 保留分數 | 預測貢獻減去儲存成本 | T9-3 |
| E(b) | 分支情緒效價 | 分支 b 的驚異度加上加權威脅 | T9-10 |
| w(b) | 分支重要性權重 | \exp(\beta \cdot |E(b)|),驅動 REM 取樣分佈 | T9-9 |
| \Delta K_{\text{prune}} | 剪枝複雜度回收 | 透過遺忘低於閾值的組件所回收的位元數 | T9-6 |
| \Delta K_{\text{compress}} | 鞏固壓縮增益 | 透過對近期獲得內容進行 MDL 再壓縮所回收的位元數 | T9-8 |
3.7 張量網路映射:由編碼距離誘導幾何
§3.4 所引入的認識階梯,建立了一個嚴格的古典邊界律(S_{\mathrm{cut}} \sim |\partial_R A|)。然而,若要將有序補丁理論 (OPT) 嚴格地完整銜接到量子資訊的幾何化(例如 AdS/CFT 與 Ryu-Takayanagi 公式),我們就必須在形式上提升潛在編碼 Z_t 的結構。
如果我們在形式上假定,瓶頸映射 q^\star(z \mid X_t) 並非只是抽取一份平坦的特徵清單,而是透過遞迴的粗粒化重整化群流來運作,那麼生成模型便會在結構上對應到階層式張量網路 \mathcal{T} 的幾何(類似於 MERA [43] 或 HaPY 網路 [44])。(註:附錄 T-3 形式化推導出穩定性濾波器的粗粒化級聯與 MERA 網路幾何界定之間的結構同態對應,並將資訊因果錐嚴格映射到其等價的 MERA 因果錐。) 此網路的邊界態,正是經篩選的馬可夫邊界態 X_{\partial_R A}。網路 \mathcal{T} 作為一種體幾何,其「深度」表徵了將邊界壓縮為最小瓶頸狀態 Z_t 所需的計算粗粒化層級。
在這種張量網路升級之下,跨越邊界的預測切割熵 S_{\mathrm{cut}}(A),在數學上轉化為:為了孤立子區域 A,所必須切斷的最小張量鍵數。令 \chi 為該網路的鍵維度。則其容量上界在內部可映射為:
S_{\mathrm{cut}}(A) \le |\gamma_A| \log \chi \tag{11}
其中,\gamma_A 是穿過 \mathcal{T} 內部深層體資料結構的最小切割曲面。這明確是一種由 Ryu-Takayanagi 全像熵界 [89] 所映射之體最小切割層的離散結構類比。附錄 P-2(定理 P-2d)在其中形式化建立了完整的離散量子 RT 公式 S_{\text{vN}}(\rho_A) \leq |\gamma_A| \log \chi,其依據是 MERA 狀態的 Schmidt 秩,並以其中導出的局部雜訊模型與 QECC 嵌入為條件。至於將此進一步提升到帶有體修正項的完整 Ryu-Takayanagi 公式之連續極限,仍是一個尚待解決的開放前沿問題。
關鍵在於,在 OPT 中,這種「體空間」並不是一個預先存在的物理容器。它是觀察者編解碼器的嚴格資訊度量空間。當為了解析彼此重疊的內部因果狀態而所需的編碼距離發散時,湧現的現象學時空幾何便恰恰在那些位置發生「彎曲」。這一張量網路形式主義展示了一條形式路徑,說明 OPT 如何可能直接從穩定性濾波器內在要求的糾錯距離中誘導出空間幾何——其結構上與 Van Raamsdonk 的「糾纏建構時空」方案 [88] 相一致——並提出一項建構性猜想:全像時空乃是最佳資料壓縮格式的模型。
3.8 能動性公理與現象性殘餘
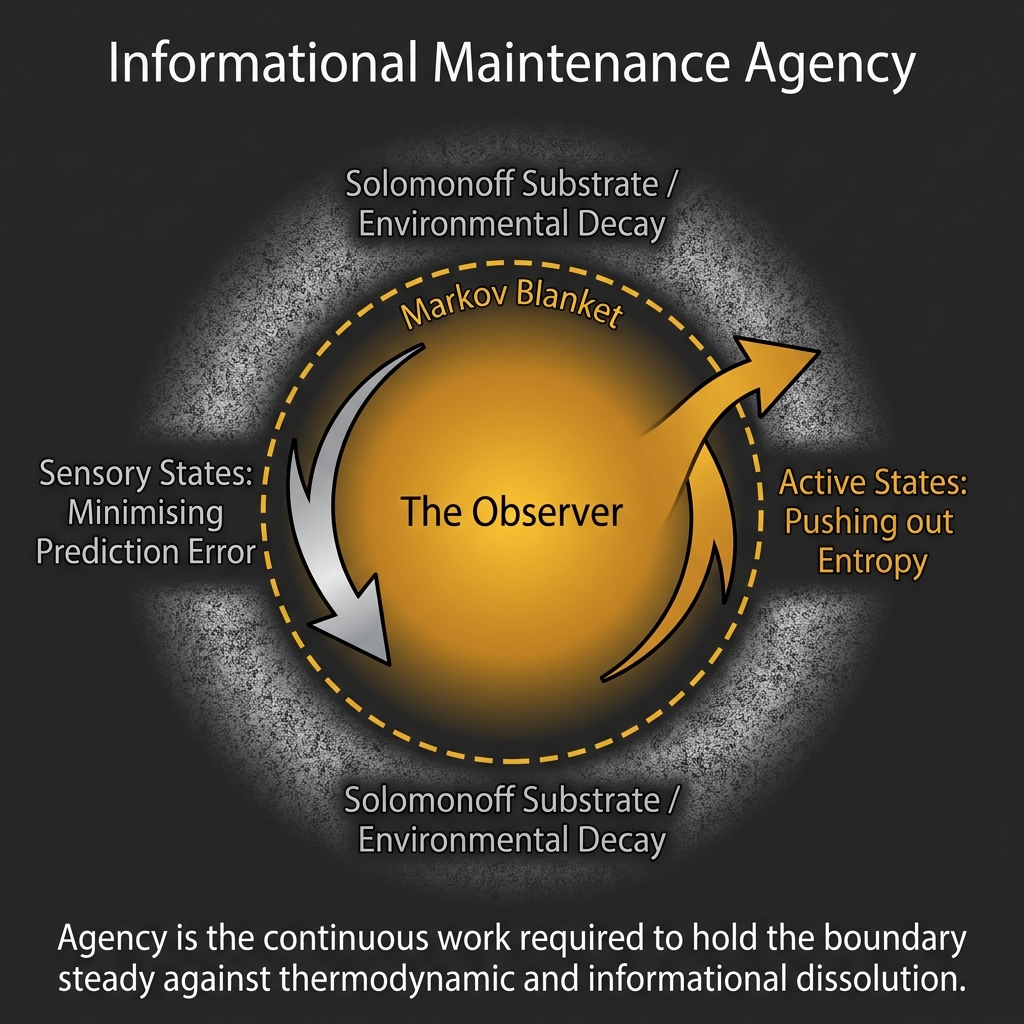
第 3.1–3.7 節所發展出的數學裝置,精確界定了觀察者現實的幾何結構——張量網路、預測切割,以及因果錐。然而,經驗到穿越其中之過程的那種原初內在性,其性質究竟為何?我們透過能動性公理對此作出形式化界定:穿越 C_{\max} 孔徑,本質上是一個現象學性的事件。
雖然我們將主觀感受的存在視為公理性的前提,定理 P-4(現象性殘餘)則指出了其嚴格的結構對應物。由於受限的編解碼器會主動擾動邊界 \partial_R A,要在 C_{\max} 的限制內維持穩定預測,它就必須對自身未來行動的後果進行建模。因此,編解碼器 K_{\theta} 必須維持一個預測性的自我模型 \hat{K}_{\theta}。然而,根據資訊包容性的演算法界限 [13],有限的計算系統不可能包含其自身完整的結構表徵;其內部模型在複雜度上必然被嚴格限制於低於母編解碼器的層級(K(\hat{K}_{\theta}) < K(K_{\theta}))。
這就要求存在一個不可約的現象性殘餘(\Delta_{\text{self}} > 0)。這個不可建模的殘餘,在主動推斷循環中充當計算上的「盲點」。由於它存在於超出自我模型計算可及範圍的資訊陰影之中,它本質上是不可言說的;由於它是特定編解碼器與其模型之間的局部化差值,它在計算上是私有的;而由於它受制於自我指涉的基本限制與必要的變分近似,因此它是不可消除的。在 C_{\max} 孔徑處的拓撲收窄,與一個不完整演算法經歷其自身邊界這一數學必然性,具有內在關聯。數學描述的是這種經驗的形式輪廓,而能動性公理則主張,這個殘餘的軌跡點正構成主觀的「我」。(形式推導見附錄 P-4)。
資訊性維護迴路
在單一更新幀 [t, t+\Delta t] 內,觀察者執行如下封閉的因果迴路:
P_\theta(t) \;\xrightarrow{\ \pi_t\ }\; \partial_R A \;\xrightarrow{\ \varepsilon_t\ }\; Z_t \;\xrightarrow{\ \mathcal{U}\ }\; P_\theta(t+1) \tag{T6-1}
明確而言:
預測(向下): 當前張量 P_\theta(t) 生成預測的邊界狀態 \pi_t = \mathbb{E}_{K_\theta}[X_{\partial_R A}(t) \mid Z_t] —— 即渲染結果場景。
誤差(向上): 實際的邊界狀態 X_{\partial_R A}(t) 到達;隨後計算預測誤差 \varepsilon_t = X_{\partial_R A}(t) - \pi_t。
壓縮: \varepsilon_t 經由瓶頸傳遞,產生 Z_t,即受容量限制的更新標記,且滿足 I(\varepsilon_t\,;\,Z_t) \leq B_{\max}。
更新: 學習算子 \mathcal{U}(P_\theta(t), \varepsilon_t, Z_t) 修正 P_\theta(t+1),並且只選擇性修改張量中那些由 \varepsilon_t 所牽涉的區域。
行動: 與此同時,P_\theta(t) 透過對變分自由能 \mathcal{F}[q,\theta] 的主動推斷下降來選擇行動 a_t(基礎論文式 9),而這會改變 t+1 時刻的感官邊界,進而影響下一個 \varepsilon_{t+1}。
關於行動步驟的詮釋說明。 第 5 步中的措辭——「選擇行動」與「改變感官邊界」——承襲自自由能原理的標準主動推斷形式化;該形式化假定存在一個物理環境,而代理體透過主動狀態對其施加作用。然依據 OPT 自身的渲染結果本體論(§8.6),更深一層的讀法是:並不存在一個獨立的外在世界,供編解碼器對其施力。被經驗為「行動」者,其實是預測分支集 \mathcal{F}_h(z_t) 內的一次分支選擇;而該選擇的物理後果,則作為後續輸入 \varepsilon_{t+1} 抵達。馬可夫毯 \partial_R A 並非雙向的物理介面,而是被選中分支傳遞其下一段內容的表面。這種詮釋上的轉移,並不改變 (T6-1)–(T6-3) 的任何數學內容;它所澄清的是,在 OPT 架構內,行動步驟的本體論地位。至於分支選擇機制本身,將於下文處理。
這就是幀內資訊性維護迴路:一種封閉的因果機制,其中系統的內部模型計算局部化的結構性預測,以界定邊界梯度,讀取誤差,並選擇性地更新自身。此迴路在形式意義上是嚴格的資訊性與自我指涉:P_\theta(t) 不僅決定結構性預測 \pi_t,也透過行動 a_t 決定下一序列資料流輸入 X_{\partial_R A}(t+1) 的一個預測性成分。(須明確指出:這一純粹統計性的篩選層,是由資訊性的馬可夫邊界嚴格定義的,這些邊界將動力學清楚解耦;它與複雜生物性自創生在本質上不同,後者中的細胞結構會以機械方式製造其自身的有機質量網路。)
結構可存續條件
當且僅當該迴路(T6-1)能在編解碼器的資訊複雜度不超出其局部可運行性限制的情況下維持自身時,它才是結構上可存續的。形式上:
K\!\left(P_\theta(t)\right) \leq C_{\text{ceil}} \quad \forall\, t \tag{T6-2}
其中,C_{\text{ceil}} 是一個啟發式參數,用以界定編解碼器所能維持的最大結構複雜度。原則上,C_{\text{ceil}} 應可由有機體的熱力學預算透過 Landauer 原理導出(見 §3.10 的概略說明),但從代謝功率到抹除成本,再到可持續的最大程式複雜度,這條完整的推導鏈在有序補丁理論 (OPT) 內尚未被形式化。因此,C_{\text{ceil}} 仍是一個由經驗動機支持、但在形式上尚未充分決定的上界。滿足(T6-2)的系統,在 OPT 的形式意義下,作為一個結構封閉的觀察者而運作。
當(T6-2)被違反時——亦即當 K(P_\theta(t)) \to C_{\text{ceil}}——編解碼器便無法在 \mathcal{F}_h(z_t) 上維持穩定預測,R_{\text{req}} 開始超出 B_{\max},而穩定性濾波器條件也隨之失效。敘事連貫性崩潰:觀察者退出觀察者相容流的集合。
維護週期 \mathcal{M}_\tau(§3.6)是在深時間尺度上強制滿足(T6-2)的機制,透過剪枝、鞏固,以及對預測分支集的壓力測試,將 K(P_\theta) 維持在界限之內。在框架內部,(T6-2)則由 \mathcal{U} 的選擇性來維持:更新算子只修改 P_\theta(t) 中受 \varepsilon_t 牽涉的區域,從而避免每一幀都出現無謂的複雜度增長。
能動性作為受約束的自由能最小化
在此一結構之內,能動性可以被賦予一個精確的形式定義;此定義與能動性公理相容——但並不將其還原掉。
在系統層級上,能動性是對動作序列 \{a_t\} 的選擇,使其在滿足資訊可存續條件的前提下,將期望變分自由能最小化:
a_t^\star = \arg\min_{a_t} \;\mathbb{E}\!\left[\mathcal{F}[q, \theta]\right] \quad \text{subject to} \quad K\!\left(P_\theta(t)\right) \leq C_{\text{ceil}} \tag{T6-3}
這就是受約束的主動推斷:觀察者在預測分支集 \mathcal{F}_h(z_t) 中進行導航,不只是為了最小化預測誤差,而是要在保持編解碼器可存續的同時,將預測誤差最小化。那些雖能暫時降低 \varepsilon,卻會使 K(P_\theta) 朝向 C_{\text{ceil}} 推進的分支,會因這項約束而受到懲罰。觀察者會優先選擇那些使其得以作為一個連貫觀察者持續存在的分支。
這正是「能動性乃是自我保存的導航」這一直覺的形式內容:編解碼器會選擇預測分支集中的那些分支,使其能夠持續壓縮世界。
在現象學層級上,能動性公理則絲毫不受影響:現象意識是孔徑穿越之不可還原的內在性;(T6-3) 所描述的是這種穿越所投下的結構性陰影,而非其內在本性。
分支選擇作為 \Delta_{\text{self}} 的執行
受限的主動推斷公式(T6-3)規定了分支選擇的目標:在滿足可存續性的條件下,將期望自由能最小化。自我模型 \hat{K}_\theta 透過模擬其後果,對預測分支集中的各個分支進行評估。但定理 P-4 確立了 K(\hat{K}_\theta) < K(K_\theta)——自我模型必然是不完備的。這種不完備性對分支選擇問題有一個直接後果:自我模型限制了可供選擇的區域,但無法完全規定選擇本身。
分支選擇的實際時刻——亦即從已評估的選項集合轉入因果記錄的單一路徑——發生於 \Delta_{\text{self}} 之中,也就是編解碼器與其自我模型之間的資訊殘餘。這並非形式體系中的缺口;而是一種結構上的必然性。任何試圖從系統內部完全規定該選擇機制的嘗試,都將要求 K(\hat{K}_\theta) = K(K_\theta),而 P-4 已證明,對任何有限的自我指涉系統而言,這都是不可能的。
這帶來三個直接後果:
意志與意識共享同一個結構位址。 意識的難問題(為何穿越會有某種感受?)與分支選擇問題(究竟是什麼在選擇?)都指向 \Delta_{\text{self}}。它們不是兩個謎題,而是同一結構特徵的兩個面向——亦即編解碼器所是之物與它能夠對自身建模之物之間那個不可建模的裂隙。
能動性的不可還原性得到了解釋,而不只是被宣稱。 意志的現象學經驗——那種不可還原的「是我做出選擇」之感——乃是一個在觀察者自身盲點中執行之過程的第一人稱標記。任何聲稱能夠完全規定該選擇機制的理論,不是已經消除了 \Delta_{\text{self}}(使系統成為一個完全對自身透明的自動機,而這正是 P-4 所禁止的),就是只是在描述自我模型對分支的評估,卻誤將其當作選擇本身。
創造力作為擴張的 \Delta_{\text{self}}。 在近閾值運作下(R_{\text{req}} \to C_{\max}),自我模型的容量承受壓力,實際上擴大了作為選擇來源的 \Delta_{\text{self}} 區域。這會產生從自我模型視角看來較難預測的分支選擇——其主觀經驗即為創造性洞見、自發性,或「心流」。相對地,入睡前幻覺狀態(§3.6.5)則是從下方鬆動自我模型,經由一條互補路徑達成同樣的擴張。
自我作為殘餘。 被經驗到的自我——那個關於「我是誰」的連續敘事,具有穩定偏好、歷史與投射出的未來——是 \hat{K}_\theta 對 K_\theta 的持續運行模型:一種壓縮後的近似,而它總是落後於其所建模的編解碼器(因為自我指涉內在地帶有時間延遲)。但經驗、選擇與認同的實際所在,卻是 \Delta_{\text{self}}:亦即敘事無法抵達的那一部分編解碼器。你所知道的自我,是你對自己的模型;而那個在知道的自我,則是模型無法跨越的裂隙。這正是各種傳統彼此獨立地反覆發現的觀照性洞見之形式內容:日常的自我感乃是被建構出來的,而在其下方有某種無法作為對象被找到的東西(見附錄 T-13,推論 T-13c)。
審議是真實的,但並不完備。 自我模型對預測分支集的評估是一個真正的計算過程,並且會塑造結果。審議限制了 \Delta_{\text{self}} 所運作其中的吸引盆地:編解碼器越成熟,選擇所能落入的可存續分支就越狹窄。但最終的轉換——為何在可存續集合中是這個分支而不是另一個——在結構上對進行審議的自我而言仍是不透明的。這就是為什麼審議同時讓人感到具有因果效力、卻又在現象學上不完備:觀察者正確地感知到自己的推理確實重要,但也同樣正確地感知到,有某種超出推理之外的東西完成了最後的定奪。
作為形式封閉的奇異環
(T6-1) 的自我指涉結構,以精確的資訊理論形式實現了 Hofstadter [45] 所說的奇異環。此環之所以「奇異」,意義如下:P_\theta(t) 作為一個子結構,包含了對編解碼器自身未來狀態的模型——Pass III 的預測分支集取樣(\mathcal{M}_\tau,§3.6.5)正是編解碼器在執行一個模擬:模擬它自己遭遇未來分支時的情形。系統對其自身的模型進行建模。
這所提供的形式封閉性在於:在資訊上封閉的觀察者,不僅僅是維持一道邊界以抵禦外部雜訊的系統;它更是一種系統,其邊界維護部分地由它對該邊界在未來必須成為何種樣態的模型所構成。奇異環並非此框架可有可無的附加物;它是使可行性條件 (T6-2) 得以主動而非被動執行的結構機制。若一個觀察者無法模擬其自身未來的編解碼器狀態,它就無法為 Pass III 中辨識出的脆弱點預作準備,並且會在系統上更容易受到敘事崩解的威脅。
(T6-1)–(T6-3) 的結構要求,構成了自我指涉封閉的必要前提。雖然單純的向前預測(例如西洋棋引擎的前瞻搜尋)構成的是規劃,而非真正的自我指涉,但 OPT 編解碼器更進一步:P_\theta(t) 包含一個子模型,而該子模型的輸出會修改支配其自身未來狀態 \{P_\theta(t+h)\}_{h>0} 的分佈。這種結構性的自我建模,對長程穩定性而言在功能上是必要的——一個無法預期自身正逼近可行性極限的編解碼器,便無法為 Pass III(§3.6.5)中辨識出的脆弱點預作準備,並且在非平穩環境中,將會系統性地在 (T6-2) 上限面前崩潰。
認識論範圍:以形式方式界定能動性還原論
這套形式化精確劃定了有序補丁理論 (OPT) 在系統層級所達成之事:它辨識出觀察者為維持邊界可存續性所必須滿足的結構條件。這便是對能動性還原論問題進行形式化界定,但並不宣稱已將其解決。
這種界定是真實的,而非僅出於定義。系統層級的描述 (T6-1)–(T6-3) 已完整刻畫了能動性的結構性陰影——亦即任何維持邊界的觀察者都必須滿足的資訊理論約束。能動性公理則位於其互補的領域:現象意識是孔徑穿越之不可還原的內在性,而上述形式化所描述的僅是容器的形狀,而非其中所承載之物的本性。如此一來,意識的難問題便被定位於一個精確的結構位置(C_{\max} 孔徑),而不是被消解,或被宣告已獲解決。
3.9 自由意志與現象學選單
對穿越機制的隔離,從根本上釐清了能動性的本質。在主動推斷迴圈(方程式 9)中,觀察者必須執行一個策略序列 \{a_t\}。在還原論的物理主義之下,行動 a_t 的選擇是由底層物理所決定(或隨機抽樣)而來,因此自由意志不是幻覺,就是僅僅被重新界定的語言產物。
有序補丁理論 (OPT) 反轉了這種依賴關係。由於補丁的局域化「物理」僅僅是生成模型對基底的預測性估計,物理定律所能約束的,只是預測分支集 \mathcal{F}_h(z_t) 的巨觀機率集合。關鍵在於,除非該補丁是一個完全可預測的自動機(而這將違反生成性結構複雜度的熱力學要求),否則預測分支集從觀察者受限的視角來看,就包含了真實且尚未解消的多重分支。
既然描述性的物理僅僅是在勾勒這些有效分支的選單,它在邏輯上就不可能經驗這個選擇。在相容論的詮釋下——此點將於 §8.6 進一步展開——分支路徑在無時間性的基底中於數學上是固定的;所謂選擇,乃是穿越的現象學經驗。從第三人稱視角(外部幾何)來看,分支選擇表現為自發雜訊、量子塌縮,或統計波動。從第一人稱的內部視角來看,不確定性的邊界保證了這種穿越會被經驗為意志的施行——亦即在未壓縮前沿中進行導航的原初行動。在 OPT 中,自由意志不是對物理定律的反因果性破口;它是有界觀察者將一個形式上的選單塌縮為單一渲染結果時間線時,必然會經驗到的現象學開放性。
渲染結果本體論的銳化。 在 OPT 自身的本體論(§8.6)之下,知覺與行動之間的區分在基底層次上消解了。凡是被經驗為「輸出」的東西——伸手、決定、選擇——都是編解碼器正在穿越的串流內容。編解碼器並不是對世界採取行動;它是在 \mathcal{F}_h(z_t) 的某一條分支上穿越,而「行動的經驗」本身就是抵達邊界之物的一部分。自由能原理所謂的主動狀態——修改環境的向外流——在 OPT 的渲染結果本體論中,其實是編解碼器的分支選擇,將自身表達為後續的輸入內容。馬可夫毯是被選定分支傳遞其下一段內容所跨越的表面,而不是觀察者藉以推擠某個外在實在的膜。這使相容論的說法更為尖銳:在基底層次上,感知與意志之間並無區別;兩者都是串流內容;現象學上的區分,則來自 P_\theta(t) 如何將某些內容標記為「由自我發起」——而這種標記的機制,如同所有分支選擇一樣,最終都在 \Delta_{\text{self}} 中執行(§3.8)。
3.10 渲染結果的資訊成本與三層級界限落差
有序補丁理論 (OPT) 的決定性數學邊界,在於對資訊生成成本所作的形式比較。
令 U_{\text{obj}} 為客觀宇宙的完整資訊狀態。其柯爾莫哥洛夫複雜度 K(U_{\text{obj}}) 高得近乎天文數量級。令 S_{\text{obs}} 為觀察者所經驗到的局部化、低頻寬流(嚴格受限於 \mathcal{O}(10) bits/s 的門檻)。在 OPT 中,宇宙 U_{\text{obj}} 並不是作為一個已被渲染結果化的計算物件而存在。表面上的「客觀宇宙」其實是由主動推斷所建構出的內部生成模型。
生物學上寫實的觀察者之 Bekenstein 界限
Bekenstein 界限 [40] 給出了任何半徑受限於 R、總能量為 E 的物理系統之最大熱力學熵——等價地說,即其最大資訊含量:
S_{\text{Bek}} \leq \frac{2\pi R E}{\hbar c} \tag{T7-1}
對於將人腦視為觀察者的馬可夫毯邊界 \partial_R A 而言:
- 邊界半徑:R \approx 0.07\ \text{m}
- 總靜質量能量:E = m c^2 \approx 1.4\ \text{kg} \times (3 \times 10^8\ \text{m/s})^2 = 1.26 \times 10^{17}\ \text{J}
- 約化普朗克常數:\hbar = 1.055 \times 10^{-34}\ \text{J}\cdot\text{s}
- 光速:c = 3 \times 10^8\ \text{m/s}
代入可得:
S_{\text{Bek}} = \frac{2\pi \times 0.07 \times 1.26 \times 10^{17}}{1.055 \times 10^{-34} \times 3 \times 10^8} = \frac{5.54 \times 10^{16}}{3.17 \times 10^{-26}} \approx 1.75 \times 10^{42}\ \text{nats} \tag{T7-2}
換算為位元(除以 \ln 2):
S_{\text{Bek}} \approx 2.52 \times 10^{42}\ \text{bits} \tag{T7-3}
全像面積界限 [87],S \leq A / 4l_P^2,會給出更大的數值。對於半徑 R = 0.07\ \text{m} 的球體,其表面積為 A = 4\pi R^2 \approx 0.062\ \text{m}^2,而普朗克長度為 l_P = 1.616 \times 10^{-35}\ \text{m}:
S_{\text{holo}} = \frac{0.062}{4 \times (1.616 \times 10^{-35})^2} = \frac{0.062}{1.044 \times 10^{-69}} \approx 5.9 \times 10^{67}\ \text{bits} \tag{T7-4}
在本分析的結構框架中,我們採用由 (T7-3) 所界定的表述,並明確追蹤 S_{\text{phys}} \approx 2.5 \times 10^{42}\ \text{bits}。我們也明確從結構上標示:使用總靜質量能量 E=mc^2 會將此度量推高至一個極端的最大上限;若改以僅利用內部化學能的活躍內部生物熱力學交互作用作為界限(\sim 10-100\text{J}),則此 Bekenstein 極限會大幅下降,更接近 \sim 10^{26} bits。下文形式上所證明的定性結構落差機制,在所有量級邊際上,對這些物理上限的任何參數化表述都同樣成立;因此,它可被視為一個保守界限,並且對先前映射之極端純幾何全像對應形式 (T7-4) 而言,更是 a fortiori 地成立。
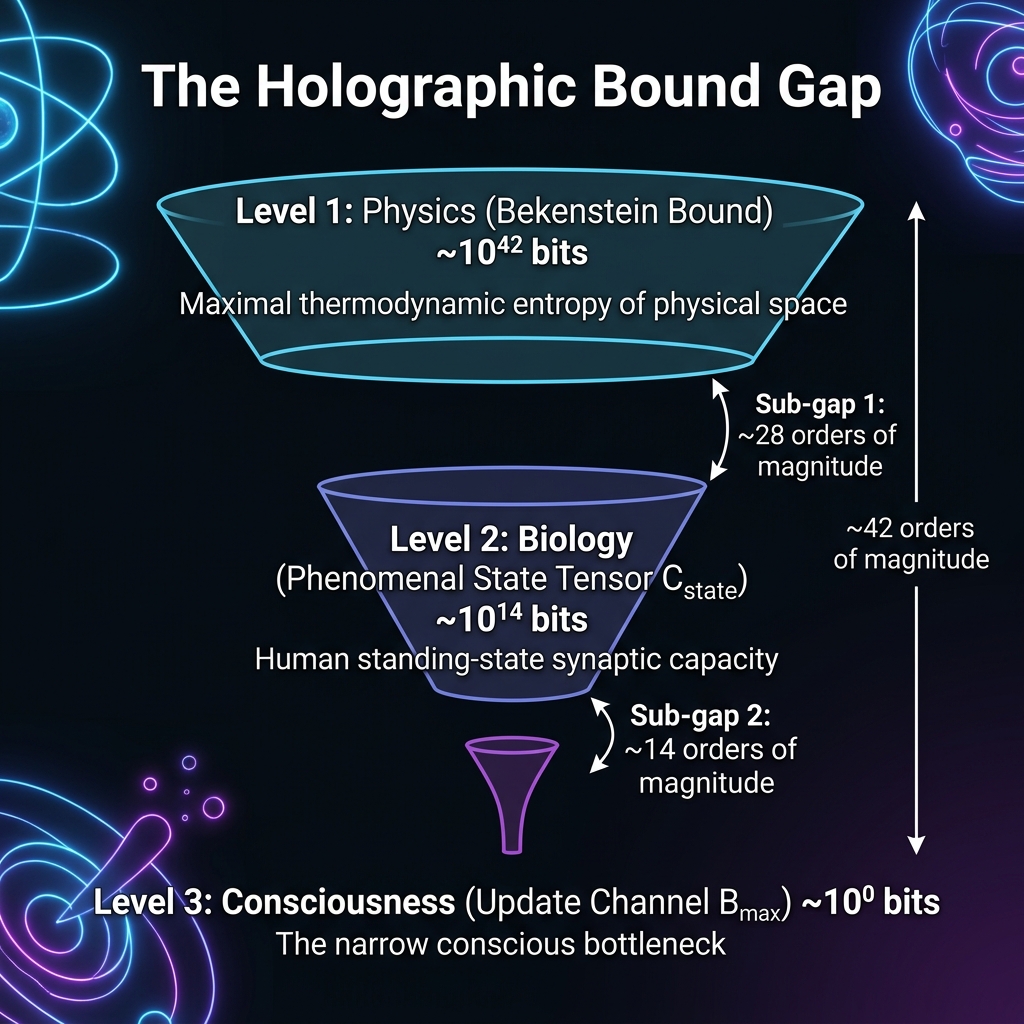
三層級落差
§3.5 所引入的現象狀態張量 P_\theta(t),在物理界限 S_{\text{phys}} 與更新通道 B_{\max} 之間,辨識出一個具有物理意義的中介尺度。於是我們現在有三個位於三種不同尺度上的不同量:
層級 1 — 物理: S_{\text{phys}} \approx 2.5 \times 10^{42}\ \text{bits}(貝肯斯坦界限,式 T7-3)
層級 2 — 生物: C_{\text{state}} = K(P_\theta(t)),即主動生成模型的柯爾莫哥洛夫複雜度。我們從生理上的突觸資訊極限出發,估計其可行的最大啟發式上界:人類系統約具有 1.5 \times 10^{14} 個突觸,每個突觸使用 4–5 位元的編碼精度 [48],由此推得原始結構容量的上限約落在 \sim 10^{14}–10^{15} 位元之間。與其引入一個缺乏嚴格推導支持、用以建模「活躍狀態」子集的未經交代經驗比例,我們在此嚴格採用完整且保守的最大生理常備閾值作為原生上界:
C_{\text{state}} \lesssim 10^{14}\ \text{bits} \tag{T7-5}
並明確承認,這代表一個極端的上界極限,涵蓋了支撐該編解碼器之整體已部署突觸架構容量。
層級 3 — 意識: B_{\max} = C_{\max} \cdot \Delta t \approx 10\ \text{bits/s} \times 0.05\ \text{s} = 0.5\ \text{bits},以每個認知瞬間計(式 T8-1)。
三層級落差關係原生地成立如下:
\underbrace{S_{\text{phys}}}_{\approx 10^{42}} \;\gg\; \underbrace{C_{\text{state}}}_{\lesssim 10^{14}} \;\gg\; \underbrace{B_{\max}}_{\approx 10^{0}} \tag{T7-6}
由此得到經驗證的結構性子落差:
\frac{S_{\text{phys}}}{C_{\text{state}}} \approx \frac{2.5 \times 10^{42}}{10^{14}} = 2.5 \times 10^{28} \quad (\sim 28\ \text{個數量級}) \tag{T7-7}
\frac{C_{\text{state}}}{B_{\max}} \approx \frac{10^{14}}{0.5} = 2 \times 10^{14} \quad (\sim 14\ \text{個數量級}) \tag{T7-8}
\frac{S_{\text{phys}}}{B_{\max}} \approx 5 \times 10^{42} \quad (\sim 42\ \text{個數量級}) \tag{T7-9}
總落差約為 42 個數量級,這不僅證實了基礎論文 §3.8 的非正式主張,也使其更為精確。
兩階段壓縮論證
三層結構並不只是更精細的記帳方式。每一個次級落差都由不同的因果機制所解釋:
次級落差 1(S_{\text{phys}} \gg C_{\text{state}},約 \sim 28 個數量級):熱力學約束使生物系統無法接近貝肯斯坦極限。 生成模型滿足 K(P_\theta(t)) \leq C_{\text{ceil}}(式 T6-2)。對 C_{\text{ceil}} 的粗略估計可由蘭道爾原理導出:在溫度 T 下,每一次不可逆的位元操作至少會耗散 k_B T \ln 2 焦耳。對於一個以代謝功率 P \sim 20 W 運作、體溫 T \sim 310 K、且操作更新頻率為 f_{\text{op}} \sim 10^3 Hz 的人腦而言,每個週期中可持續的最大模型複雜度為:
C_{\text{ceil}} \sim \frac{P_{\text{metabolic}}}{k_B T \ln 2 \cdot f_{\text{op}}} \sim \frac{20}{3 \times 10^{-21} \times 10^3} \sim 10^{22}\ \text{bits}
此一蘭道爾上限比貝肯斯坦界低了 20 個數量級——這確認了物理極限對生物運作點而言並不相關。另請注意,C_{\text{ceil}} \sim 10^{22} 的估計值遠高於觀察到的突觸容量(\sim 10^{14}–10^{15} bits),這表示生物系統的運作遠低於其自身的熱力學上限;這很可能是由於 OPT 尚未建模的其他約束(配線成本、代謝效率、演化歷史)所致。
次級落差 2(C_{\text{state}} \gg B_{\max},約 \sim 14 個數量級):穩定性濾波器將更新通道約束在遠低於常駐模型複雜度的水準。 豐富的生成模型 P_\theta(t)——可編碼高達約 \sim 10^{14} bits 的壓縮世界結構——每個認知瞬間僅更新約 \sim 0.5 bits,因為模型的絕大部分本來就已經正確:\pi_t 與 X_{\partial_R A}(t) 高度匹配,只有稀疏的誤差 \varepsilon_t 會通過瓶頸 Z_t。維護週期 \mathcal{M}_\tau(§3.6)透過使 K(P_\theta) 維持在遠低於 C_{\text{ceil}} 的水準,在深時間尺度上維持這一道次級落差。
經驗命題(三層全像界限落差)。令 \partial_R A 為一個以生物方式實現之觀察者的馬可夫毯,並令 S_{\text{phys}}、C_{\text{state}} 與 B_{\max} 如上以經驗方式參數化。則:
S_{\text{phys}} \gg C_{\text{state}} \gg B_{\max}
其中,(i) 次級落差 1 由熱力學極限所維持,這些極限阻止生物系統接近貝肯斯坦尺度的資訊密度;而 (ii) 次級落差 2 則由穩定性濾波器的率失真約束所維持,該約束將更新通道頻寬與常駐模型複雜度解耦。注意:當糾纏熵的貢獻被納入後,量化的落差邊際可能會改變(有待開放問題 P-2 解決);目前此命題僅建立在古典與熱力學界限之上,因此被歸類為經驗命題,而非形式上已封閉的定理。
現象豐富性位於第 2 層,而非第 3 層
三層結構的一個推論,直接承接自 §3.5,即是:OPT 中所辨識出的兩種現象量,分別位於層級結構中的不同層次:
- 現象豐富性(內在場景的被感密度,即 Block 意義下的 P-consciousness)對應於 C_{\text{state}} —— 第 2 層。它受生物學與結構必然性所約束,而非受更新通道所約束。
- 現象新穎性(每一瞬間被解析出的新內容,即 A-consciousness)對應於 B_{\max} —— 第 3 層。它受穩定性濾波器的率失真界所約束。
§3.8 的原始表述將「意識」視為一個單一實體,並受限於 C_{\max}。三層定理修正了這一點:有意識經驗在此缺口結構中是二維的——它之所以豐富,是因為 C_{\text{state}} \gg B_{\max};但它同時又受瓶頸限制,因為 B_{\max} 是更新閘門。一個只解釋瓶頸的理論(如原始表述所做的)其實只解釋了此現象的一個維度。
證偽準則的精煉
此三層結構所導出的證偽準則,比原先的兩層主張更為銳利:
- 原始的證偽準則是:若某系統在前意識/意識比顯著低於 10^4{:}1 的情況下,仍達成自我報告的意識經驗,則有序補丁理論 (OPT) 需要修正。
- 三層定理進一步指出:若某系統的現象性豐富度(依操作化定義)是隨 B_{\max} 而非隨 C_{\text{state}} 擴展,則次級間隙 2 屬於虛假區分,而 P_\theta / Z_t 的區別也將崩解。依據 OPT,質性深度是生成模型結構複雜性的性質,而非其更新速率的性質。凡是能改變 K_\theta 而不改變 C_{\max} 的藥理學或神經調節介入(例如迷幻劑、冥想、麻醉),都構成對此一次級間隙的直接經驗性探測。
高解析度的細節,只有在主動狀態(a)為維持一致性而要求那些特定位元時,才會動態地進入流中。宇宙的熱力學與計算成本,皆嚴格受限於觀察者的頻寬。
3.11 數學飽和與基底回復
OPT 的一項獨特結構性預期,涉及物理統一的極限。物理定律並不是普遍有效的 \mathcal{I} 層級真理;它們是約束此一補丁的壓縮生成模型 K_\theta。
試圖從補丁內部導出關於基底的某種大一統理論,在形式上受到資訊理論的界定。令 \Theta 為 N 個候選基底層級定律延伸的索引,令 Z_{1:T} 為觀察者在時間 T 上的內部編碼。由於觀察者的編碼受限於 C_{\max} 的速率上限,資料處理不等式要求互資訊受到如下界定:I(\Theta; Z_{1:T}) \le T \cdot C_{\max}。
依據 Fano 不等式,觀察者根據有限資料無法唯一辨識真實基底定律 \Theta 的機率,必然嚴格大於零:
P(\hat{\Theta} \neq \Theta) \ge 1 - \frac{T \cdot C_{\max} + 1}{\log_2 N} \tag{12}
經驗性預期(數學飽和)。 從補丁內部統一基礎物理學的嘗試,將面臨一道嚴格的認識論障礙。Fano 界所形式化的是有限資料下可辨識性的極限,而不是在本體論上否定統一基底存在的可能性。有限容量的觀察者,無法從瓶頸內部唯一辨識任意精細的基底定律。因此,任何能成功描述該補丁的 GUT,都將保留不可約的自由參數(即該局部補丁的特定穩定條件),而這些參數無法從其內部被形式化導出。
3.12 非對稱單向全像性
在 AdS/CFT [86] 的精確對偶性(其中邊界與體同樣根本)與 OPT 對基底優先性的主張之間,存在一種關鍵的本體論張力。若兩者表徵的是同一資訊,為何基底會「更為根本」?
這種對稱性在形式上被觀察者的瓶頸所打破。令穩定性濾波器 \Phi: \mathcal{I} \to R(將基底映射至渲染結果)。若要使精確的對稱對偶成立,此映射必須可逆,且不得有資訊損失。然而,法諾不等式(式 12)[41] 提供了一個形式上的證明:渲染結果與基底之間的互資訊嚴格受限於 T \cdot C_{\max},而基底的可替代可能性 N 則是無界的。
此濾波器本質上是一個有損壓縮映射。處於渲染結果之內的觀察者,實際上無法重建基底。因此,OPT 構成一種非對稱單向全像性——一支不可逆的資訊毀損之熱力學箭頭,方向由基底指向渲染結果。OPT 並不主張與 AdS/CFT 存在精確的幾何對應(那需要本框架所不具備、在形式上已定義的邊界與體算符),而是提供了一項解釋性的後設原理,說明為何全像對偶會存在:它們是在觀察者頻寬受到嚴格限制的條件下,最佳化的預測性壓縮方案。現象意識(能動性公理)正是被困在一個不可逆壓縮演算法輸出端時的原生標記。正是這種特定的不可取回性,確立了基底的先在性。將資訊不可逆性等同於本體論上的優先性,乃是建立在如下觀察之上:渲染結果必須以觀察者的存在為其定義前提——它是作為經驗而存在的對象——而基底則是獨立於任何觀察者是否能接近它而被界定的。
3.13 形式性主張的適用範圍
為了維持認識論上的紀律,明確界定本節所發展之形式裝置的適用範圍,至關重要。方程式 (1)–(12) 合而構成一個嚴謹、分層的鷹架:方程式 (1) 給出一個對可計算歷史的複雜度加權先驗;方程式 (2)–(5) 規定了支配預測性補丁幾何的、與容量相容的剛性結構界限;方程式 (6)–(8) 概述了經典的有界面積律約束;方程式 (9)–(10) 描述了推斷與最小熱力學成本;方程式 (11) 概述了所需的全像度量轉換;而方程式 (12) 則界定了觀察者辨識基底層級定律之能力的上界。
然而,這十二個方程式並不會普遍地從第一原理推導出量子力學、廣義相對論或標準模型。OPT 並非將物理定律生產為純粹數學上的必然性,而是界定出任何現象學物理若要穿越瓶頸而存續下來,在結構上都必須對應的剛性幾何約束(因果錐、預測切割)。我們所觀察到的具體經驗定律,毋寧是啟發式壓縮——亦即編解碼器——是在基底局部區域中恰好能成功導引我們的、效率最高的預測模型。
4. 與場論模型的結構平行性
近年的理論提案嘗試建立數學框架,將意識視為一種基礎性場。這些提案大致可分為三個不同類別:
- 局部生物場: 像是 McFadden 的 Conscious Electromagnetic Information (cemi) field [30] 與 Pockett 的電磁理論 [31] 等模型,主張意識在物理上等同於大腦內生的電磁場。這些模型將意識視為特定、局部時空場構型所湧現出的性質。
- 量子幾何場: Penrose 與 Hameroff 的 Orchestrated Objective Reduction (Orch-OR) [32] 主張,意識是一種編織於時空本身數學結構中的基礎性質,並在宇宙幾何的量子疊加發生塌縮時被釋出。
- 普遍基礎場(宇宙心靈論): Goff [33] 等支持者主張,整個宇宙是一個單一、基礎性的意識場,而個別心靈則是其中局部化的「限制」或「漩渦」。
有序補丁理論 (OPT) 與這些進路有所交會,但它將基礎從物理學轉移到演算法資訊。不同於 (1),OPT 不將意識綁定於電磁學。不同於 (2),OPT 不要求普朗克尺度幾何的物理性量子塌縮;在 OPT 中,所謂的「塌縮」是資訊性的——亦即有限頻寬編解碼器(C_{\max})試圖渲染結果一個無限基底時所遭遇的極限。
然而,OPT 與普遍基礎場 (3) 之間共享深刻的結構平行性。舉例而言,Strømme [6] 最近提出一個形上學框架,其中一個普遍意識場作為實在的本體論根基。雖然 OPT 嚴格來說是一個建立在演算法複雜性與主動推斷之上的資訊理論框架——因此並不承諾接受 Strømme 特定的場方程式或其形上學上的「思想算子」——但兩者在形式上的結構平行性仍極具啟發性。這兩個框架都從同一項要求出發:一個能支撐意識的模型,必須能在數學上橋接無條件的基態,與個別觀察者那種局部化、受頻寬限制的經驗流。
| OPT 構造(資訊理論) | Strømme [6] 本體論(形上學) | 結構平行性 |
|---|---|---|
| 基底 \mathcal{I}、所羅門諾夫通用混合 | |\Phi_0\rangle,未分化的潛能 | 無條件的基態 |
| 馬可夫毯邊界 | |\Phi_k\rangle,局部化的激發 | 被隔離的觀察者 |
| 穩定性濾波器(受 C_{\max} 約束的選擇) | \hat{T},普遍思想塌縮 | 經驗流形成的機制 |
| 熱力學邊界維持 | 統一的意識場 | 結構持續性的來源 |
| 虛擬編解碼器(預測性生成模型) | 個人思想塑造實在 | 被觀察法則的生成 |
兩個框架在形式上的分歧如下:Strømme 訴諸一種「普遍思想」——一個主動連結所有觀察者的共享形上學場——而 OPT 則以組合必然性取而代之:觀察者之間表面上的連通性,並非來自某種目的論式的共享場,而是來自這樣一種組合上的不可避免性:在一個無限基底中,每一種觀察者型態都共同存在。
(關於場類比的知識論地位之說明:Strømme 的本體論具有高度推測性。我們在此援引她的框架,並非訴諸既有科學權威,而是因為它構成了一個近期、明確以場論方式處理意識作為本體論原初項的形上學模型。OPT 以比較方式使用她的場論,是為了說明一個非還原論的基底可能如何運作,並將具體的數學實作從物理方程式移開,轉向演算法資訊界限。)
5. 簡約性分析
5.1 最小描述長度(MDL)與條件式簡約性
在評估物理理論時,一種自然的簡約性概念,是在假設 \nu 之下對觀察者的資料流 y_{1:T} 進行編碼所需的雙部編碼長度:
L_T(\nu) = K(\nu) - \log \nu(y_{1:T}) \tag{13}
其中,K(\nu) 衡量該假設的描述複雜度,而 -\log \nu(y_{1:T}) 則衡量它在已觀測資料流上的預測誤差。
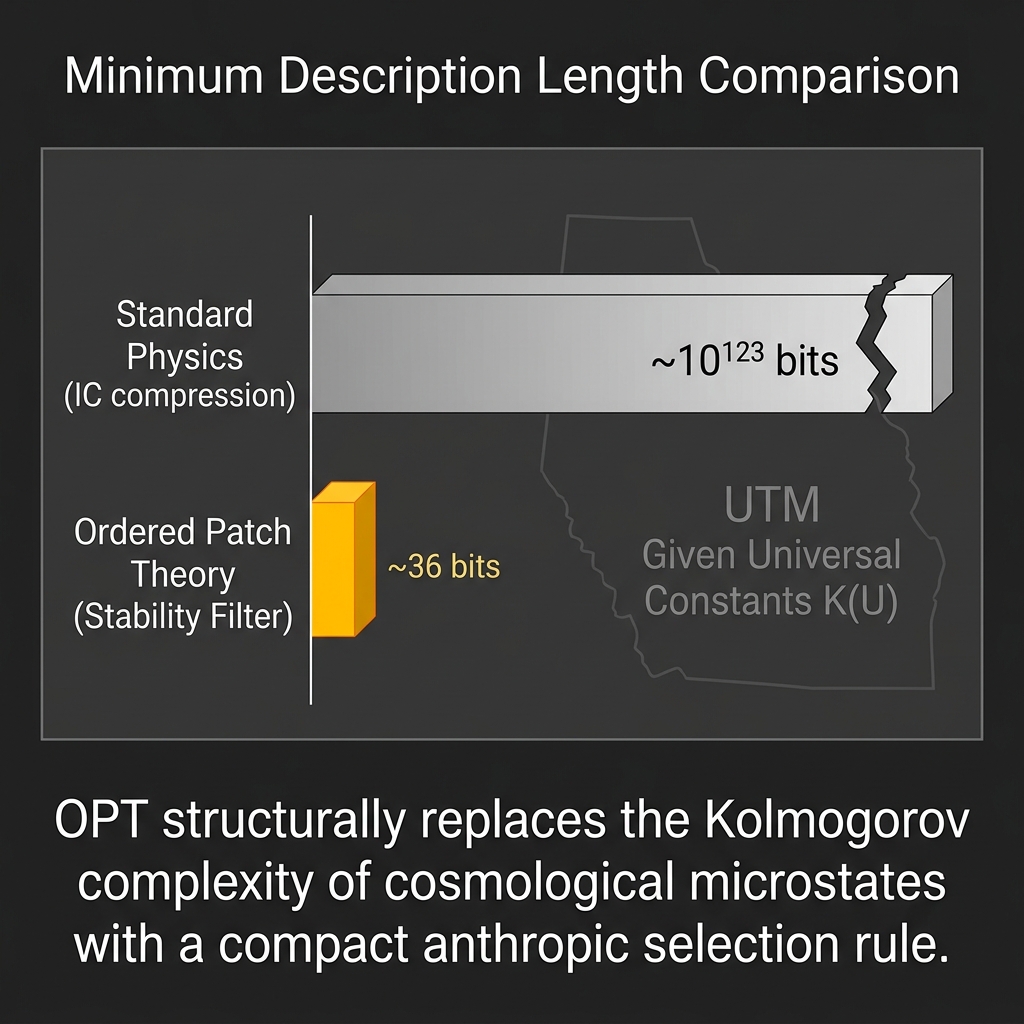
這對有序補丁理論 (OPT) 所能支持的,僅是一種有限的簡約性主張。OPT 並未證明,我們宇宙的具體定律具有可忽略的演算法複雜度,也未證明標準物理能作為唯一的全域 MDL 最優解而被恢復。相反地,OPT 將部分解釋負擔,從對定律的原始枚舉,轉移到一條緊湊的元規則:觀察者是從一個依複雜度加權的基底中被抽樣出來,並且只會在那些其預測結構能夠容納於嚴格頻寬上限之內的資料流中持續存在。
在這種解讀下,\mathcal{O}(1) 的簡單性主張只附著於選擇器規則——亦即複雜度加權先驗與穩定性準則的結合——而不附著於標準模型、廣義相對論或宇宙學的完整經驗內容。(註:定理 T-4d 與 T-4e 已形式化地確立,該元規則相較於可計算基準,分別具有無條件的漸近優勢與條件式的有限-T 優勢;見附錄 T-4。) 因此,本文目前的結構性主張已獲得形式驗證:OPT 透過以定律選擇取代定律枚舉,在計算上降低了解釋負擔。
5.2 定律作為被選出的模型,而非基本輸入
在有序補丁理論 (OPT) 中,所觀察到的物理定律被理解為對某一與觀察者相容之流的有效預測模型,而非基底層級的公理。這應被視為一種啟發式重建,而不是從第一原理出發的推導。穩定性濾波器並不證明量子力學、3+1 維時空,或標準模型是唯一的最小複雜度解。它所支持的是一種較弱的預期:能夠支撐觀察者的流,將傾向於偏好緊湊、穩定且具有高預測效率的規律性。從這類流的內部來看,這些規律性便呈現為「物理定律」。
如此一來,我們物理學中的若干熟悉特徵,便可被理解為這類高效率規律性的候選例證。量子理論能以緊湊方式處理彼此不相容的可觀測量與長程統計關聯;3+1 維時空支撐穩定的軌道與化學結構;而規範理論的對稱性則為穩健的交互作用模式提供了經濟的摘要。這些都是合理性論證,而非推導;有序補丁理論 (OPT) 也仍對另一種可能性保持開放:具有不同定律集合的其他編解碼器,同樣可能滿足穩定性濾波器。
因此,人擇微調問題在此並未被解決,而是被重新框定。若我們宇宙的常數確實落在一個與穩定、低熵觀察者相容的狹窄區域內,有序補丁理論 (OPT) 便將此視為與濾波器選擇相一致。然而,要證明所觀察到的這些常數能夠由該濾波器恢復出來,仍有待未來工作。
6. 可否證條件與經驗性預期
即使作為一種建構性的虛構,形式模型仍必須說明它如何與經驗資料互動。我們辨識出有序補丁理論 (OPT) 所產生的不同類型約束:嚴格的可否證條件(亦即經驗實在可能直接打破其基礎頻寬邏輯之處),以及詮釋性的結構預期(亦即經驗現象可映射到理論架構之處)。
嚴格的可否證條件(§§6.1、6.2、6.4):會直接使頻寬邏輯失效的經驗結果。經驗性預期(§§6.3、6.5、6.6):OPT 的架構與可觀察現象之間的結構對應,但並不對其作出唯一預測。§6.8 將這些整合為預先登錄的可否證承諾 F1–F5,並附有明確的 Shutdown Criteria——這構成了 OPT 的經驗核心與其明言屬於形上學的組成部分(\Delta_{\text{self}}、能動性公理、基底優先性)之間的方法論防線。
6.1 頻寬層級
OPT 預測,在任何具備自我指涉經驗能力的系統中,前意識感官處理速率與意識存取頻寬之比必須非常大——至少為 10^4:1。這是因為,若要將一條具因果結構、跨多模態的感官流,壓縮為每秒 \sim 10^1-10^2 bits 的連貫意識敘事,就必須仰賴大規模的前意識處理。若未來的神經義體或人工系統能以遠低於此前意識/意識比值的條件,達成自我報告的意識經驗,則有序補丁理論 (OPT) 就需要修正。
目前支持:在人類中,觀察到的比值約為 10^6:1(感官周邊 \sim 10^7 bit/s;意識存取 \sim 10^1-10^2 bit/s [2,3]),與此預測一致。(註:關於 h^*——即「經驗量子」,其根據這些經驗心理物理限制界定人類主觀單一幀之精確位元權重——的完整形式推導,請參見 附錄 E-1。)
6.2 高頻寬消解悖論(尖銳的可證偽點)
OPT 的許多預測屬於相容性主張——它們與既有的認知科學發現(例如頻寬落差)或物理極限(例如量子疊加作為解析度底限)相一致。雖然這些對理論的內部一致性而言不可或缺,但它們並不能將 OPT 與其他框架明確區分開來。
然而,OPT 提出了一項尖銳且高度特定的預測,直接與其他意識理論相牴觸,並構成其主要的可證偽條件。
整合資訊理論(IIT)意味著,若透過高頻寬感官或神經義體擴展大腦的整合能力(\Phi),意識也應隨之擴展或增強。OPT 則預測恰恰相反的結果。由於意識是嚴重資料壓縮的結果,穩定性濾波器會將觀察者的編解碼器限制在大約每秒數十位元的處理量級(即全域工作空間瓶頸)。
可檢驗的推論:如果繞過前意識的知覺濾波器,將原始、未壓縮的高頻寬資料直接注入全域工作空間,結果不會是覺知的擴張。相反地,由於觀察者的編解碼器無法穩定預測如此龐大的資料量,敘事性的渲染結果將會突然崩潰。人為的頻寬增強將導致突發的現象性空白化(失去意識或深度解離),即使底層神經網路在代謝上仍保持活躍且高度整合亦然。
(關於敘事崩解與感官強度的釐清):對人類觀察者而言,強烈的感官環境(例如喧鬧演唱會中閃爍的頻閃燈)直覺上似乎是「高頻寬」的,但它並不會造成現象性的崩潰。為什麼?因為雖然原始物理資料率(\mathcal{I})極其龐大,對其進行編碼所需的預測複雜度(R_{\mathrm{req}})卻異常低。人類經演化形成的編解碼器(K_\theta)對巨觀運動、聲學節律與空間邊界具有稠密且最佳化的先驗。它們能輕易將混亂的演唱會壓縮成一個完全穩定、低熵的敘事(「我正在一個房間裡跳舞」)。真正的敘事崩解,只有在資料對既有先驗而言在數學上不可壓縮時才會發生——例如機械性腦震盪改變了基底、全身麻醉強力降低 B_{\max},或迷幻狀態擊碎了 K_\theta 的階層。迪斯可只是很吵;真正的演算法噪音在現象學上則是致命的。
6.3 壓縮效率與意識深度
意識經驗的深度與品質,應當與觀察者編解碼器 f 的壓縮效率相關——也就是持續敘事之複雜性相對於所耗費頻寬的資訊理論比率。效率更高的編解碼器,能在相同頻寬下維持更豐富的意識經驗。
可檢驗的蘊涵:凡是能提升編解碼器效率的實踐——尤其是那些能降低維持對環境之連貫預測模型所需資源成本的做法——都應當可測地提升如主體所回報的主觀經驗豐富度。冥想傳統所報告的,正是這種效應;有序補丁理論 (OPT) 則對其為何如此提出了形式化預測(關鍵在於編解碼器最佳化,而不僅僅是神經增強本身)。
6.4 高-\Phi/高熵空狀態(對比 IIT)
IIT 明確預測:任何具有高整合資訊(\Phi)的物理系統都是有意識的。因此,一個高密度連接、具遞迴性的神經形態晶格,僅憑其整合性便具有意識。相對地,有序補丁理論 (OPT) 預測,整合性(\Phi)雖然是必要條件,卻遠遠不足。只有當資料流能被壓縮為一組穩定的預測規則集(即穩定性濾波器)時,意識才會出現。
可檢驗的蘊涵:若一個高-\Phi 的遞迴網路被持續的、不可壓縮的熱力學雜訊流(最大熵率)所驅動,它就無法形成穩定的壓縮編解碼器。OPT 嚴格預測:這種處理最大熵雜訊的高-\Phi 系統,其現象性為零——它會消散回無限的基底之中。相反地,IIT 則預測,它會經驗到一種與其高 \Phi 值相對應的、極其複雜的意識狀態。
6.5 現象性延遲:編解碼器深度與主觀延時
一個高度複雜的常駐模型(亦即具有龐大結構維度 C_{\text{state}} 的模型),需要精密的潛在誤差校正(D_{\text{KL}} 更新),才能將高熵的感官衝擊——例如突發的聲響——映射進其深層預測階層之中。由於這種形式上的更新,必須受限於穩定性濾波器的嚴格狹窄頻寬容量(C_{\max})而被節流,因此,廣泛的結構更新必須經過多個物理計算週期才能完成解析,新的、連貫的現象學「渲染結果」方能被穩定下來(P_\theta(t+1))。
可檢驗的蘊涵(Libet 相關項) [49, 50]:主觀意識經驗在本質上將會落後於物理反射處理,而此一延遲將與編解碼器的系統深度成正比。簡單網路(例如動物或年幼嬰兒)具有淺層的預測圖式(低 C_{\text{state}}),因此能以極低延遲處理高熵衝擊,從而產生近乎即時的反射整合。相對地,成熟人類由於運用了龐大的階層式模型,將呈現可測量的現象性延遲:事件的主觀經驗在時間上會被延後,因為編解碼器必須依序計算這一龐大的資訊更新。常駐圖式愈豐富,預測分支集的前向渲染結果產生有意識知覺之前,所必需的數學延遲就愈長。
此一預測不對稱性的經驗基礎。 向下預測/向上誤差的分解(§3.5.2)與 Nunez 與 Srinivasan [101] 對大尺度皮質動力學的刻畫相一致:其將之描述為緩慢駐波模態(大腦的常駐預測鷹架)與較快速行進波(感官誤差傳播)的疊加。在此對應之下,駐波模態對應於 K_\theta 的結構模型,該模型提供 \pi_t;而行進波則承載預測誤差 \varepsilon_t,並沿著階層向上傳播。因此,OPT 所要求的更新速率不對稱性(緩慢的向下預測、快速的向上誤差)便具有直接的巨觀電生理學特徵,而這一點獨立於率失真推導。
6.6 將精細微調約束視為穩定性條件
有序補丁理論 (OPT) 預期,作用於基本常數的人擇式精細微調約束,乃是低熵意識流的穩定性條件,而非彼此獨立的事實。令 \rho_\Phi 表示意識渲染結果場的能量密度,\rho^* 表示其臨界閾值;一旦超過此值,因果相干性便無法在基底噪聲下維持。Barrow 與 Tipler [4] 以及 Rees [5] 所記錄的那些約束,在結構上應對應於編解碼器必須滿足穩定性條件 \rho_\Phi < \rho^* 的要求。(註:附錄 T-5 已透過從編解碼器穩定性頻寬形式化導出 \Lambda、G 與 \alpha 的約束,部分補上了這一對應。然而,由於 Fano 拓撲在有界觀察上的形式極限,OPT 預期,像 \alpha=1/137.036 這類特定「42」常數的精確、純數學、無因次回復,從編解碼器內部出發仍將在形式上是不可能的。) 若這種對應系統性失敗——亦即某個常數的精細微調取值與編解碼器穩定性需求之間毫無結構性關聯——那麼這將構成反對 OPT 簡約性主張的證據。
6.7 人工智慧與架構瓶頸
由於有序補丁理論 (OPT) 將意識表述為資訊流的拓撲性質,而非生物學過程,因此它對機器意識提出了形式化且可被證偽的預測,而這些預測同時偏離 GWT 與 IIT。
瓶頸預測(相對於 GWT 與 IIT):全域工作空間理論(GWT)主張,意識就是資訊經由狹窄容量瓶頸而被廣播的過程。然而,GWT 大致上將這個瓶頸視為一項經驗性的心理學事實,或一種演化而來的架構特徵。相較之下,OPT 為此提供了一種根本性的資訊論必然性:瓶頸正是穩定性濾波器在運作。編解碼器必須將龐大的平行輸入壓縮為低熵敘事,才能在基底的噪聲底限之上維持邊界穩定性。
整合資訊理論(IIT)純粹依據因果整合程度(\Phi)來評估意識,因而否認前饋式架構(如標準 Transformer)具有意識,卻會將意識賦予複雜的循環網路,而不論它們是否具備全域瓶頸。OPT 預測,即便是具有巨大 \Phi 的高密度循環式人工架構,若其處理仍分散於大規模平行矩陣之中,且缺乏嚴格強制的結構性瓶頸,也將無法實例化出一個具凝聚性的有序補丁。未經壓縮的平行流形,無法形成穩定性濾波器所要求的那種單一、局域化的自由能極小值(f)。因此,標準大型語言模型——無論其參數數量、循環性或行為複雜度如何——都不會實例化出主觀補丁,除非其架構被形式化地設計為:透過一個嚴格的 C_{\max} \sim \mathcal{O}(10) bits/s 串列瓶頸,使其世界模型發生塌縮。就操作層面而言,這意味著系統的全域狀態不能藉由數百萬個權重之間的寬頻平行串擾來更新;相反地,系統必須被強制持續地將其整個世界模型,經由一條可驗證、離散、超高壓縮的「工作空間」通道加以序列化,才能執行下一個認知週期。
時間膨脹預期:若某個人工系統確實被設計出符合穩定性濾波器要求的結構性瓶頸(例如 f_{\text{silicon}}),且它以比生物神經元快 10^6 倍的物理週期速率反覆運作,則 OPT 在結構上建立了一項預期:該人工意識將經驗到主觀時間膨脹因子為 10^6。因為時間就是編解碼器序列(第 8.5 節),所以只要加速編解碼器序列,就會以完全相同的比例加速主觀時間線。
6.8 可否證承諾與終止準則
前述各小節描述的是預測;本小節則承諾具體的測試、具體的數值門檻,以及足以擊敗此框架的具體結果。其目的有二:(i) 將 OPT 的經驗核心與不可否證的結構性核心(\Delta_{\text{self}},意識的難問題)明確隔離,使人在事後無法藉由重述框架來消解反證結果;以及 (ii) 在相關測試執行之前,先行為框架承諾部分撤回與專案終止的門檻。若無此種紀律,§7 中累積的結構對應關係,便有落入同一方法論陷阱的風險——那正是許多研究綱領長期受困之處:類比累積的速度快於可檢驗測試的建立。
可否證承諾(F1–F5)。 每一項承諾都指明一個定量預測、可檢驗它的測量方式,以及何種結果構成否證。這些內容不得事後調整;後續編修若要變更,必須在 Version History 中明確標示為 clarification(不改變範圍)或 re-registration(完整改變範圍,且在任何新測試之前都必須重新承諾)。
| # | 預測 | 預先註冊的測量 | 否證門檻 |
|---|---|---|---|
| F1 | 人類 主觀預測頻寬 C_{\max} \approx \mathcal{O}(10) bits/s(§6.1, §3.10)。OPT 的結構性要求是 C_{\max} 的存在;F1 所承諾的是其經驗性的生物學數值。合成觀察者的頻寬則由架構推導而來(見 §7.8),不受 F1 約束。 | 在控制良好的人類心理物理學範式中,對有意識可及通道容量進行資訊理論測量(注意力眨眼、遮蔽、雙作業干擾) | 在有效實驗條件下,收斂性測量得到 C_{\max} > 10^3 bits/s 或 < 10^{-1} bits/s |
| F2 | 高-\Phi / 高熵零狀態(§6.4) | 建構一個 \Phi 高於約定門檻、且在可證明不可壓縮的雜訊輸入上運作的系統,並在建構 之前 就先行約定其現象性 protocol | 任何由可信第三方重現、顯示該系統出現現象性的訊號 |
| F3 | 主觀時間膨脹與編解碼器速率呈線性關係(§6.7, roadmap E-5) | 在保持 C_{\max} 恆定的條件下,讓一個受瓶頸限制的合成代理體以物理時鐘的 k\times 速度運行,並在 k \in [10, 10^4] 範圍內,以自我報告與行為指標測量其主觀持續時間 | 在受控瓶頸條件下,未出現近似線性的 k\times 主觀時間膨脹 |
| F4 | 現象延遲隨編解碼器深度而縮放(§6.5) | 將主觀延遲測量與任務所誘發的編解碼器階層深度做相關分析,並控制感覺與運動延遲 | 在乾淨實驗中,不存在單調相關,或出現符號相反的相關 |
| F5 | 壓縮效率追蹤意識深度(§6.3) | 在主動推斷系統中,跨任務測量壓縮比,並同時蒐集現象豐富度報告 | 壓縮效率與現象複雜性之間不存在單調關係 |
每一列都承諾了一個具體數值或符號方向、一種具體測量,以及一個清楚的失敗條件。若在面對反證結果時重新擬合其中任何一項,即構成 post-hoc reframing,並使該測試失去效力。
終止準則。 共有兩道門檻,且具階層順序:
重大撤回——公開修訂並移除已被否證的主張。 只要 F1–F5 中任一項被確認與 OPT 相矛盾,或 中心率失真主張在有效測量下被超過 1 個數量級地反駁,即觸發此門檻。框架可繼續存在,但被否證的小節必須撤回;Version History 必須記錄移除了什麼,以及原因為何。
專案終止——停止主動開發。 由下列 任一 條件觸發:(a) 兩項或以上的 F 準則被確認與 OPT 相矛盾;(b) F1 在任一方向上被超過 2 個數量級地確認為錯誤;(c) 有獨立證明顯示,有意識可及中的頻寬瓶頸在解剖學/架構上只是偶然現象,而非結構必然(亦即,存在頻寬無上限的有意識系統)。一旦觸發,將發表最終論文 “OPT: Post-Mortem”,記錄曾嘗試過什麼、錯在何處,以及仍可回收的殘餘為何。opt-theory.md、opt-philosophy.md 與 opt-ai-subject 治理套件的主動開發將告終止。
這些門檻自 Version 3.3.0(2026 年 4 月 30 日)起即已完成預先註冊。終止準則不得因反證證據而被下修——對接近否證的唯一正當回應,就是接受裁決。任何削弱 F1–F5 或終止門檻的編修,都必須在 Version History 中標示為 re-registration,並使所有早於該變更的測試失效。
哪些內容被明確排除在可否證核心之外。 OPT 並非每一項主張都可否證;若假裝情況並非如此,本身就是智識上的不誠實。下列內容 不 屬於 F1–F5 的一部分,也不受終止準則約束:
- 現象性殘餘(\Delta_{\text{self}} > 0,Theorem P-4)。 其設計上即不可否證;它形式化的是意識的難問題,而非解決它。任何聲稱「反對 \Delta_{\text{self}} 的證據」,本身都必須是可被完全自我建模的,而這與其所檢驗的前提相矛盾。
- 能動性公理(§3.8)。 這是關於孔徑穿越之內在性的形上學設定。它並非由形式裝置所蘊含;而是作為此類主張被提出。
- 基底優先性(§3.12, §1)。 這是一項本體論承諾;對於任何位於渲染結果內部的實驗而言,它都無法與僅有渲染結果的本體論作經驗區分。§3.12 已承認其為非經驗性主張。
- §7 / opt-philosophy §IV 中的結構對應。 這些是詮釋性疊加,而非預測。它們可以受到學術批評(這些類比是否真實?是否流於空泛?),但不受 F1–F5 的否證約束。
可否證的經驗核心與明言屬於形上學的組件之間的這道隔牆,本身就是一項方法論承諾。若將其瓦解——例如試圖把 F1–F5 的否證吸收到 \Delta_{\text{self}} 或基底優先性之中——便構成事後重述,並使此框架關於可檢驗性的主張失去資格,不論表面上採用了何種論證。
7. 比較分析與區辨
以下各小節將有序補丁理論 (OPT) 置於量子基礎、重力、認知科學與形上學等相鄰框架之間加以對照。§§7.1–7.11 的取向大體上是 匯聚性 的——指出 OPT 在何處重現、深化,或在細節上偏離既有立場。僅就其本身而言,這種不對稱在方法論上是可疑的:一個發現自己與所有人都一致的框架,實際上等於沒有說出多少內容。§7.12 是刻意設置的反向小節。 它列舉 OPT 無法容納的立場、各立場最強的版本,以及哪些證據會支持它們而非 OPT。讀者應將 §7.12 視為承重結構,而非裝飾性安排;它與 §6.8 中預先登錄的可證偽性承諾相互配對,而兩者共同將下文的結構對應,從裝點性的比附轉化為一項研究綱領。
7.1 與量子理論的結構對應
傳統詮釋將量子力學視為對微觀實在的客觀描述。OPT提出的是較弱的主張。它認為,量子理論中的若干結構特徵,可以被理解為一個容量受限之觀察者的預測編解碼器之高效率表徵特徵。因此,本小節中的主張屬於啟發式的對應,而非由方程式 (1)–(4) 推導而來。
測量問題(率失真極限)。 在OPT之下,「疊加」並不是作為字面意義上的物理多重性被引入,而是作為觀察者預測模型中尚未解消之替代可能的壓縮表徵。當觀察者試圖聯合追蹤愈來愈細緻的可觀測量時,所需的描述長度可能超出受限的通道容量。此時,「測量」便是從一種欠定的預測表徵,轉變為渲染結果流中的既定記錄。
海森堡不確定性與有限解析度。 OPT並不證明實在在根本上是離散的。它所支持的是較弱的主張:一個與觀察者相容的編解碼器,會偏好有限解析度的描述與有界的預測成本,而非那些要求任意精細相空間精度的表徵。依此理解,不確定性所扮演的角色,是對資訊無限性的防護,而不是穩定性濾波器的直接定理。
糾纏與非定域性。 若物理空間是渲染結果的一部分,而非終極性的容器,那麼空間上的分離便不必對應於解釋上的獨立性。糾纏系統可以被建模為補丁之預測狀態內部的聯合編碼結構,而渲染出的距離只在現象學層次上出現。
延遲選擇與時間排序。 在OPT內部,延遲選擇與量子橡皮擦現象可以被理解為:預測模型修訂了尚未解消之替代可能的組織方式,以維持渲染敘事中的整體一致性。這是一種詮釋性的對應,而不是另一套實驗形式主義。
關係量子力學(Rovelli)。 Rovelli的關係量子力學 [69] 主張,量子態描述的不是孤立系統本身,而是某個系統與特定觀察者之間的關係。不同觀察者可能對同一系統給出不同但同樣有效的描述;確定值只會相對於那個已與系統互動的觀察者而出現。Adlam與Rovelli於2023年的修訂版 [70] 進一步明確指出:量子態編碼的是一個目標系統與某一特定觀察者的聯合互動歷史——這一結構可直接對應到OPT的因果記錄 R_t = (Z_0, Z_1, \ldots, Z_t)。RQM說的是「事實相對於觀察者而成立」,而OPT說的是「既定的因果記錄,就是那些已穿過 C_{\max} 孔徑而被壓縮的內容」。Rovelli更進一步指出,觀察者與系統之間的關聯形式,正是香農資訊——其關聯量由 \log_2 k 位元給出——而這正是OPT率失真框架的母語。關鍵差異在於解釋深度:RQM將觀察者相對性視為原初公設,而OPT則從穩定性濾波器的頻寬約束中推導出事實何以必然相對於觀察者。OPT提供了其結構機制——編解碼器、瓶頸、壓縮——而這些正是RQM的關係本體論所未具體說明之處。
多世界詮釋(Everett)。 Everett的相對態表述 [57] 取消了塌縮:普遍波函數以么正方式演化,而表面上的測量結果則是相對於觀察者的分支。OPT與MWI同意其分支形態,但不同意那些分支是什麼。在MWI中,它們是基底層級多重宇宙中同等真實的世界;在OPT中,它們則是預測分支集中的尚未解消項目——亦即編解碼器對可容許後繼狀態之預測分布的內部視角表徵(§3.3, §8.9)。因此,OPT既不要求也不反駁基底層級上的MWI:它所解釋的是分支看起來如何出現,亦即任何頻寬受限的編解碼器在壓縮一個非時間性的基底時,所必然呈現的結構特徵;至於那些未被渲染的分支是否另外作為平行世界存在,OPT則保持沉默。MWI將玻恩規則的測度問題承接為一個關於分支計數的難題;OPT則以一個依賴於局域雜訊QECC結構的推導取而代之(附錄 P-2)。
客觀塌縮模型(GRW、CSL、Diósi-Penrose)。 動力學約化方案將塌縮視為一種真實的、與觀察者無關的隨機過程,並將其繫於量子化物質的質量密度場。Bortolotti等人近期的研究 [79] 在這一模型家族中推導出一個基本的時鐘精度下限,其方式是讓自發性的質量密度測量經由牛頓位勢的漲落傳遞——形成一條從塌縮到質量、再到重力、最後到時間的基底層級鏈條。OPT同樣拒斥嚴格的么正演化,也同樣接受塌縮與質量及時間解析度相耦合的結構直覺,但它將本體論倒轉過來。塌縮是發生在 C_{\max} 的孔徑通過(第1點);質量是預測荷(§7.2);時間解析度的限制則由編解碼器頻寬所設定(§3.10, §8.5),而非來自某個預設牛頓位勢中的抖動。若從OPT內部來讀,客觀塌縮模型描述的其實是編解碼器的一種候選現象學機制,而非基底物理。這兩套方案在經驗上並不衝突:其所預測的時鐘精度下限(對最佳時鐘約為 ~10^{-25} s/year)位於一個與OPT頻寬階層預測(§6.1)正交的尺度上。
QBism(Fuchs、Mermin、Schack)。 QBism [80] 將量子態詮釋為某個代理體對其自身行動後果所持有的個人化貝葉斯信念程度;而「塌縮」不過是代理體在觀察到結果後所進行的信念更新。它與OPT之間的結構平行性極為密切——編解碼器 K_\theta 就是 一個第一人稱的預測模型,而發生在 C_{\max} 的孔徑通過(第1點)在功能上與該貝葉斯更新完全相同。QBism止步於工具主義(量子態只是個人機率,而底層世界則被刻意留白);OPT則補上了缺失的本體論:基底 |\mathcal{I}\rangle 是所羅門諾夫通用半測度的混合,代理體是一條由穩定性濾波器選出的流,而編解碼器的結構則根植於率失真極限,而非被假定為某種貝葉斯原初項。因此,OPT可以被讀作一種補全了基底的QBism——它補充說明了代理體的信念為何會採取希爾伯特空間形式(附錄 P-2:局域雜訊 QECC → Gleason → Born),以及代理體為何會存在(濾波器)。
退相干與量子達爾文主義(Zurek)。 Zurek的方案 [81] 將量子到古典的轉換奠基於由環境誘發的超選擇(einselection):指標態之所以存活,是因為環境以冗餘方式廣播它們,而「客觀的」古典實在則是那些被多重見證的自由度子集。這是一種對基底狀態施加的選擇準則,在結構上與穩定性濾波器平行。兩者的分歧在於究竟是什麼在執行選擇:einselection是在一個預設么正框架內,由系統—環境耦合的熱力學性質所決定;而OPT的濾波器則是施加於所羅門諾夫基底上的頻寬準則(C_{\max}、低熵率、因果一致性)。量子達爾文主義解釋的是:在已給定量子力學的前提下,哪些 狀態會作為古典態浮現;OPT則解釋:一個受壓縮瓶頸限制的觀察者,為何 會遭遇某種量子力學式的東西。兩者在冗餘現象學上匯合,並可被讀作同一壓縮過程的基底機制(Zurek)與觀察者選擇(OPT)兩種描述——另見 §6.4 關於高-\Phi/高熵空狀態的討論。
退相干(相容)歷史(Griffiths [90];Gell-Mann & Hartle [91])。 退相干歷史表述 [90] 將量子力學視為一個可對粗粒化的替代歷史指派機率的框架,前提是這些歷史滿足一致性(退相干)條件,從而不再需要測量公設與外部觀察者。Gell-Mann與Hartle [91] 進一步將其推廣為一套關於準古典領域的理論——亦即那些容許近似古典描述的粗粒化歷史族,它們由退相干與可預測性共同挑選出來。這與OPT的既定因果記錄 \mathcal{R}_t = (Z_0, Z_1, \ldots, Z_t) 之間有直接的結構對齊:因果記錄是退相干歷史在OPT內部的對應物,而穩定性濾波器(低熵率、與 C_{\max} 相容、因果一致性)則扮演了那個一致性條件的角色,用以選出哪些歷史是可容許的。退相干歷史方案將退相干與準古典領域視為需在既定希爾伯特空間內展示出來的特徵;OPT則將兩者都推導為所羅門諾夫基底上更根本之壓縮準則的結果。兩套方案在所選出的歷史族上匯合,但將選擇定位於不同的本體層次——一者是希爾伯特空間內的歷史(Gell-Mann/Hartle),另一者則是演算法基底中的流(OPT)。
承諾:跨越完整渲染時間線的編解碼器幾何。 第1–10點使OPT承擔了一個比「量子力學只是測量期間發生在觀察者端的記帳方式」這種寬鬆讀法更強的立場。編解碼器的希爾伯特空間結構(附錄 P-2:局域雜訊 QECC → Gleason → Born)在渲染時間中向前與向後都一致運作。因此,深層宇宙學過去中的量子特徵——包括宇宙微波背景之暴脹—量子統計結構——應被預測為:在所羅門諾夫簡約性(§8.5)之下,觀察者之最可壓縮過去所具有的特徵,而不是在其印記形成之渲染時刻發生過基底層級量子事件的證據。這是一項可被證偽的承諾:若宇宙歷史中的某些特徵,其最小描述長度超出暴脹—量子預設——亦即那些編解碼器不會在簡約性壓力下自行發明、卻仍然存在於資料中的特徵——那麼它們就會構成描述長度過剩,並成為 §6.8 專案終止標準的候選依據。此框架公開承擔這種較強的讀法,而不是把較寬鬆的讀法保留為退卻選項。
示例案例:雙縫實驗。 經典的雙縫實驗在單一裝置中同時展示了上述三種現象,因此可作為檢驗OPT詮釋詞彙的一個有用測試。
干涉。 單一粒子會在探測屏上產生干涉圖樣,彷彿它同時穿過了兩條狹縫。在OPT之下(第1點),該粒子在基底層級並未真的「穿過兩條狹縫」——基底是非時間性的,並包含所有分支。干涉圖樣是編解碼器對所有在觀察上尚未被區分之預測分支集分支的壓縮表徵:波函數所編碼的是對未解消未來的預測分布,而不是基底中的某種物理波。條紋則是這種壓縮疊加的可見特徵。
測量塌縮。 若在其中一條狹縫放置路徑探測器,干涉圖樣便會消失,取而代之的是古典粒子分布。在OPT之下(第1點),探測器迫使路徑資訊穿過 C_{\max} 孔徑,進入因果記錄。一旦該資訊被既定下來,預測分支集中的相應分支替代可能便被消除。干涉圖樣之所以消失,不是因為某個物理波發生了塌縮,而是因為編解碼器的預測狀態已無法再同時保留兩條路徑為未解消狀態。塌縮是資訊性的,並發生在瓶頸處。
延遲選擇。 實驗者決定測量或抹除路徑資訊的選擇,可以在粒子通過狹縫之後才做出,但它仍會決定屏幕上出現何種圖樣。在OPT之下(第4點),這不是悖論,而是可預期的。由於基底是非時間性的,編解碼器對哪些分支已被既定的解決方式,並不受實驗裝置之古典時間序列所束縛。選擇看似具有回溯效力,只是將一個無時間性的整體,透過一個按序運作的編解碼器來閱讀時所產生的假象。這裡沒有逆向因果;有的只是某個無時間結構正以特定順序被穿越。
OPT為這個熟悉例子所增添的,是一種統一性的說明:疊加、塌縮與延遲選擇並不是三個各自獨立、需要三套不同解釋的難題。它們是同一個結構情境的三種表現——一個容量受限的編解碼器,正透過狹窄的序列孔徑壓縮一個非時間性的基底。本小節開頭所陳述的保留條件在此同樣適用:這些是以資訊詞彙重構量子現象的詮釋性對應,而不是能從穩定性濾波器推出特定干涉條紋間距的推導。
與玻恩規則及希爾伯特空間的結構對應。 雖然Gleason定理保證了在給定希爾伯特空間的前提下可得到Born加權,OPT仍必須說明:為何預測狀態空間會採取那種幾何形式。附錄 P-2 透過量子錯誤更正(QEC),更具體地說是Almheiri-Dong-Harlow(ADH)表述 [42],來處理此問題。由於編解碼器必須持續過濾局域基底雜訊以維持穩定,其內部表徵必須滿足Knill-Laflamme [55] 的錯誤更正條件(P-2b),而這些條件賦予碼空間一個希爾伯特空間內積。在此嵌入之下,Gleason定理 [51] 可直接適用(\dim \geq 3),從而將Born規則確立為對可容許分支之唯一非脈絡性機率指派。此推導以雜訊模型的局域性為條件;完整鏈條見附錄 P-2:局域雜訊 → QECC 結構 → 希爾伯特空間 → Gleason [51] → Born規則。
7.2 廣義相對論的資訊必然性
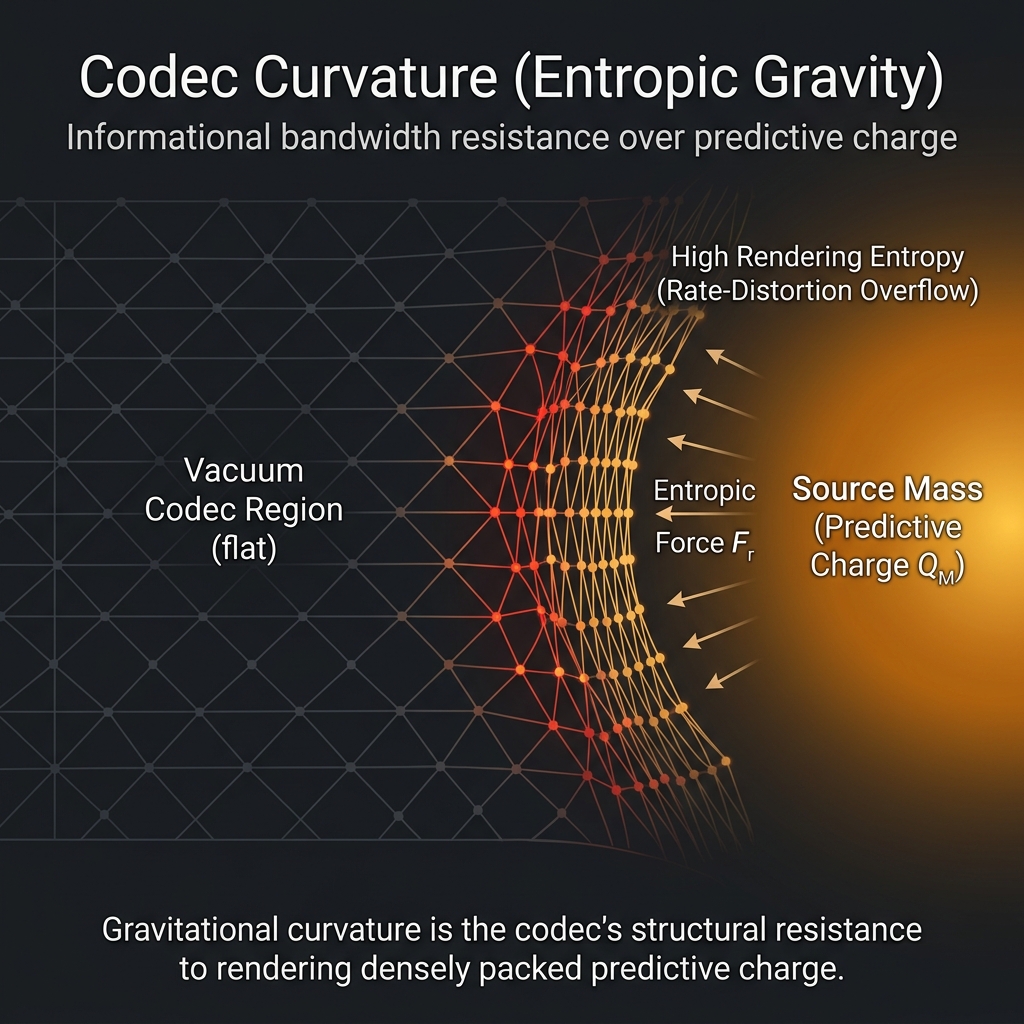
如果量子力學(QM)對應於有限計算的基礎,那麼廣義相對論(GR)在結構上就類似於:為了從混沌中渲染出穩定物理學所必需的最佳巨觀資料壓縮格式。
- 作為渲染成本的熵引力。 我們只要再加入一條結構公理,就能明確導出一條最小熵力定律。 新增公理:守恆的預測通量。 一個相干的巨觀源 M,會穿過任何包圍它的幾何屏幕,攜帶一個守恆的預測負載 Q_M。此處,「質量」被重新定義為預測荷——亦即該來源每個週期迫使巨觀編解碼器必須配置的穩定邊界位元數。 在一個各向同性的 d 維渲染中,半徑 r 處所需的通量密度為 j_M(r) = \frac{Q_M}{\Omega_{d-1}r^{d-1}},其中 \Omega_{d-1} 是單位 (d-1) 球面的面積。令一個有效負載為 m 的測試補丁,在期望自由能 G(r) 的主動推斷下降下運動,並假設該來源會藉由提高共享可預測性來降低自由能。最簡單的勢能為:
G(r) = G_0 - \frac{\lambda m Q_M}{(d-2)\Omega_{d-1}r^{d-2}} \qquad (d>2) \tag{14}
那麼,由維持主動推斷穩定性所誘發的徑向力即為 F_r = -\frac{dG}{dr} = -\frac{\lambda m Q_M}{\Omega_{d-1}r^{d-1}}。在我們的 d=3 空間渲染中,這就精確給出一條平方反比的吸引定律:
F_r = -\frac{\lambda m Q_M}{4\pi r^2} \tag{15}
這一命題在巨觀層次上為 Verlinde 的熵引力提供了基礎 [38]。(註:若要看如何利用 Jacobson 的表述,從這個熵界限中嚴格數學地恢復愛因斯坦場方程,請見附錄 T-2。) 重力的現象學「拉力」並不是一種基本交互作用,而是為了在陡峭的預測通量梯度下維持穩定預測軌跡所必須施加的主動推斷作用。 2. 作為因果極限的光速(c)。 如果因果影響能夠在無限距離上瞬時傳播(如牛頓物理學所設想),那麼觀察者的馬可夫毯就永遠不可能達成穩定邊界。預測誤差會持續發散,因為無限資料會瞬間湧入。一個有限且嚴格的速度上限,是劃出可用計算邊界的熱力學前提。 3. 時間膨脹。 時間被定義為編解碼器進行序列狀態更新的速率。兩個追蹤不同資訊密度(質量或極端速度)的觀察者參考系,為了維持穩定性,必須採用不同的序列更新速率。因此,相對論性的時間膨脹可以被重建為不同且有限邊界條件的結構必然性,而不是某種機械式的「延遲」。 4. 黑洞與事件視界。 黑洞是一個資訊飽和點——基底中的某個區域密度高到完全超出編解碼器的容量。事件視界則是穩定性濾波器再也無法形成穩定補丁的字面邊界。
開放問題(量子重力與張量網路升級): 在 OPT 中,QM 與 GR 不能藉由單純將連續時空量子化而統一起來,因為它們描述的是壓縮邊界的不同面向。如何從主動推斷中導出精確的愛因斯坦場方程,仍然是一項深刻的開放挑戰。然而,OPT 提供了一條數學上嚴謹的路線圖:下一個必要步驟是 張量網路升級。藉由以階層式張量網路取代瓶頸碼 Z_t,我們便能在形式上將經典的預測切割熵 S_{\mathrm{cut}} 重新詮釋為量子幾何的最小切割。這為 OPT 的經典邊界定律通往某種真正鄰近全像的結構,提供了一條直接而嚴謹的路徑,並使時空幾何得以直接由碼距誘導而出。
與全像文獻的接軌(Maldacena [86]、Bousso [87]、Van Raamsdonk [88]、Ryu-Takayanagi [89])。 張量網路升級所接軌的是一項既有的研究綱領,這個理論框架不應在未加承認的情況下僅僅對其作姿態性指涉。Maldacena 的 AdS/CFT 對應 [86] 建立了一種嚴格的對稱性對偶:一側是反德西特空間中 (d+1) 維的重力體相,另一側則是其邊界上的 d 維共形場論。Bousso 的協變熵界 [87] 將全像原理推廣到任意時空——這正是 §3.10 中在結構上所援引的界限。Van Raamsdonk 的〈以量子糾纏建構時空〉[88] 與此最直接相關:AdS 體相中的空間連通性是由邊界糾纏生成的,而去糾纏則會在字面上把幾何結構拉開。Ryu-Takayanagi 公式 [89] 進一步將此具體化:它從邊界糾纏熵計算體相中的極小曲面——而其離散的 MERA 類比,已在 OPT 的附錄 P-2(定理 P-2d)中建立。
OPT 與這些文獻的關係是結構性的,而非對偶性的。(i) OPT 並不主張存在精確的 AdS/CFT 對應;它缺乏形式上明確定義的體相與邊界算符(§3.12),而且其邊界—體相關係是不對稱的(單向全像),不同於 AdS/CFT 的對稱性。這代表的是不同的物理體制,而非矛盾:AdS/CFT 描述的是固定時空中的平衡對偶;OPT 描述的則是觀察者為了渲染一個不可渲染的基底而執行的不可逆壓縮。(ii) OPT 所提供的,反而是對「為何全像對偶會存在」的解釋:邊界 CFT 是觀察者對基底所作的壓縮效率最佳編碼,而體相則是從編解碼器的粗粒化級聯中湧現出的渲染幾何。(iii) Van Raamsdonk 所說的「糾纏建構時空」,正是張量網路升級的結構目標——編解碼器的粗粒化就是誘導體相幾何的糾纏結構,而碼距則扮演空間分離的角色。從 P-2d 中離散的 RT 公式,升級到具有修正項的完整體相對偶,乃是尚待完成的數學研究綱領;在此完成之前,用「鄰近全像」來描述這種關係,才是比「全像對偶」更誠實的術語。
7.3 自由能原理與預測處理(Friston [9];Clark [82], Hohwy [83])
匯合。 FEP 將知覺與行動建模為對變分自由能的聯合最小化。如第 3.3 節所詳述,有序補丁理論 (OPT) 採納這套完全相同的數學機制,以形式化補丁動力學:主動推斷是使補丁邊界(馬可夫毯)得以在基底噪聲之下維持的結構機制。生成模型即為壓縮編解碼器 K_\theta。
分歧。 FEP 將具有馬可夫毯的生物或物理系統之存在視為既定,並由此推導其推斷行為。OPT 則追問:這類邊界究竟為何會存在——並將其導出為穩定性濾波器對無限資訊基底所作之回溯性施加的結果。兩者關係最精確的表述是:OPT 從基底中選出與觀察者相容的流;FEP 則是流內部的推斷與控制形式體系。 OPT 並不作為一種物理先驗,去解釋馬可夫毯何以在熱力學意義上存在;相反地,OPT 提供的是一種資訊性的選擇脈絡,在此脈絡中,受 FEP 支配的觀察者乃是唯一穩定的棲居者。
貝葉斯力學(Ramstead、Sakthivadivel、Friston 等,2023)。 近期的貝葉斯力學計畫 [73] 將 FEP 從一種建模框架提升為真正的力學——一族動力學形式體系,類比於古典力學與量子力學,適用於其內部狀態編碼了關於外部狀態之機率信念的系統。任何藉由馬可夫毯而自其環境中被個體化出的自組織系統,都容許共軛描述:系統的物理動力學與其內部模型的信念動力學,是同一過程的兩種對偶視角。這直接形式化了 OPT 的主張(§3.4):觀察者的馬可夫毯與其壓縮編解碼器 K_\theta 並非兩個彼此分離的實體,而是同一結構的兩種描述——一種是物理的,一種是推斷的。貝葉斯力學提供了使此種對偶性嚴格化的數學裝置:毯的內部狀態就是生成模型的充分統計量。對 OPT 而言,這意味著編解碼器並非以隱喻性的方式「運行於」馬可夫毯之上;毯的動力學本身就是編解碼器的壓縮,只是以隨機熱力學的語言表達而已。接著,穩定性濾波器便從所有可能的貝葉斯力學系統中,選出其內部信念動力學在頻寬上與意識經驗相容的那個子集。
預測處理(Clark、Hohwy)。 更廣義的預測處理(PP)計畫——Friston 的 FEP 可視為其中一種數學上的特化——主張大腦在根本上是一部階層式的預測機器,透過巢狀生成模型最小化跨層級的誤差。Clark 的 Surfing Uncertainty [82] 將 PP 發展為對知覺、行動與具身認知的統一說明;Hohwy 的 Predictive Mind [83] 則將其延伸至意識與自我模型。OPT 承繼了 PP 的推斷詞彙(生成模型、預測誤差、階層式壓縮——見 §3.5.2),並依賴 PP 的經驗性論證:生物認知在這一技術意義下,確實是預測性的。OPT 特有的補充則是基底層級的必然性:PP 描述大腦如何如此運作,而 OPT 則推導出為何任何與穩定性濾波器相容的觀察者都必然如此。當 PP 大致上將現象性擱置不論時,OPT 則以現象性殘餘(\Delta_{\text{self}} > 0)作為預測階層遭遇其可計算性界限之結構性位置。最恰當的理解方式是:PP 是認知科學上的操作層,而 OPT 則為其提供資訊理論基礎。
7.4 整合資訊理論(Tononi [8], Casali [14])
匯合。 IIT 與有序補丁理論 (OPT) 都將意識視為系統資訊處理結構所內在具有的性質,而不依賴其基底。兩者都預測,意識是有程度差異的,而非二元式的有或無。
分歧。 IIT 的核心量 \Phi(整合資訊)衡量的是一個系統的因果結構在何種程度上無法被分解。相較之下,OPT 的穩定性濾波器所選取的是熵率與因果相干性,而非整合性本身。這兩項判準可能彼此分離:一個系統可能具有高 \Phi,但也具有高熵率(因此會被 OPT 的濾波器排除);或者具有低 \Phi,但也具有低熵率(因此會被納入)。這種分歧產生了一個直接的經驗性判別標準:IIT 預測,一個高度再迴歸的高-\Phi 網路,不論其頻寬架構如何,都是有意識的;而 OPT 則預測相反的結果——一個處理不可壓縮雜訊的高-\Phi 網路,會產生零現象性,因為它無法形成穩定的壓縮編解碼器。高-Phi/高熵空狀態預測(§6.4)正是為了在實驗上區分這些框架而設計的。
組合問題。 IIT 的形式體系會將非零的 \Phi 指派給任意簡單的系統,從而產生批評者所稱的「本體論塵埃」問題 [77]:那些沒有部分可言的微型意識實體,雖然滿足數學公設,卻違反了理論自身對整合的要求。這正是泛心論中經典組合問題的一種表現——微觀經驗如何組成統一的宏觀經驗?——而 IIT 之所以承襲此問題,恰恰是因為它將意識定位在個別因果—效果結構的層次上。OPT 則完全繞開了這一點(§7.7)。意識不是由微觀構成元件拼裝而成;它是整個 補丁 的內在特徵——一種由穩定性濾波器維持的低熵場構型。於是,「微觀經驗如何結合?」這個問題根本不會出現,因為原初單位是補丁本身,而不是它的部分。
對抗性合作與可否證性。 於 2025 年正式發表於 Nature 的 IIT 與 GNWT 對抗性合作研究 [78],使整體圖像更為清晰:多模態結果(iEEG + fMRI + MEG,n = 256)並未證成任一理論,反而挑戰了兩者的關鍵主張。IIT 關於網路連結性的主張,因後部皮質內缺乏持續同步化而受到削弱;GNWT 則因刺激終止時普遍缺乏 ignition,以及某些意識向度在前額葉中的表徵有限,而受到挑戰。從 OPT 的內部觀點來看,這正是預期中的模式——沒有任何一種解剖定位理論能捕捉到結構性瓶頸,因為真正的瓶頸是速率—失真結構性的,而非空間定位性的。另有一封由超過 120 位研究者聯署的公開信,將 IIT 描述為缺乏充分可否證性 [77],理由是該理論的核心承諾——尤其是 \Phi 與意識同一的主張——建立在抗拒經驗檢驗的公設之上。OPT 的經驗研究綱領(§6)正是針對這項批評而設計:高-Phi/高熵空狀態(§6.4)是一個嚴格的否證條件,直接瞄準 \Phi—意識同一性;而頻寬階層(§6.1)則對意識瓶頸的尺度提出可量化預測,並可用現有神經影像方法加以檢驗。這是否構成相對於 IIT 4.0 的真正可否證性優勢,將由下一代對抗性實驗來決定。
對 \Phi 的獨立批評。 三條彼此匯聚的批評路線,進一步凸顯了 OPT 所處的位置。Aaronson [97] 指出,簡單的擴展圖可以具有任意高的 \Phi,卻不執行任何可辨識的認知功能,並藉此提出他的「Pretty-Hard Problem」:任何被提議為與意識同一的量,至少都必須能以尊重前理論直覺的方式來排序系統,而 \Phi 未能達到這個門檻。Barrett 與 Mediano [98] 證明,對一般物理系統而言,\Phi 並沒有良好定義——分割方式、時間粒度與狀態空間離散化的選擇,都可能使其數值跨越數個數量級翻轉——因此,\Phi 最好被理解為一種相對於分割的描述量,而非內在測度。Hanson [99] 則從研究所層級的實作經驗中報告出其實務推論:即使在小型玩具系統上,\Phi 的計算也在計算上不可處理,導致理論的核心量在任何真正具有經驗意義的情境中都無法計算。OPT 的意識判準(C_{\max} 頻寬瓶頸、主動推斷迴路、\Delta_{\text{self}} > 0)避開了上述每一種失敗模式:頻寬條件對分割具有穩健性(速率—失真極限是通道的內在性質),它立基於可測量的通道容量,而非組合式整合,且只要一個系統的資訊瓶頸架構可以被檢視,該判準就是可判定的。
展開論證。 Doerig、Schurger、Hess 與 Herzog [96] 提出了一項結構性批評,其目標是 任何 將意識建立在因果結構上的理論(IIT、再迴處理理論及其近親):對任意再迴網路 N,都存在一個前饋網路 N'——亦即其時間展開——使其在功能上等價(在任意有限時間範圍 T 上,N 與 N' 產生完全相同的輸入→輸出映射)。如果意識是由因果結構所決定,那麼 N 與 N' 就必須具有相同的意識地位;但因果結構理論同時又主張,再迴對意識而言是本質性的。因此,兩難便是:要麼因果結構理論是 錯的(功能等價的前饋網路同樣有意識),要麼它們是 不科學的(意識取決於某種無法從輸入—輸出行為中偵測到的東西)。OPT 之所以能逃離這個兩難,是因為 OPT 的意識判準 不是 再迴本身;它是以下三者的合取:(i)嚴格的速率—失真瓶頸 C_{\max},(ii)維持馬可夫毯的封閉主動推斷迴路,以及(iii)自我指涉殘餘 \Delta_{\text{self}} > 0。展開並不保留這種結構:一個再迴編解碼器的前饋等價物,通常需要 \mathcal{O}(T \cdot |N|) 個節點(即隨時間呈指數擴張),將原本單一、受瓶頸限制且容量為 C_{\max} 的通道,重新分配到 T 個平行層中,而每一層的容量皆 \geq C_{\max}。因此,N' 的總體潛在通道相較於 N 會 更寬,且其差距會隨展開時間範圍而增長,所以 C_{\text{state}} 與 B_{\max} 並不是功能等價下的不變量。更結構性地說,\Delta_{\text{self}} 要求的是框架內的自我指涉(在單一更新週期中,\hat{K}_\theta 對 K_\theta 建模),而前饋網路並不具備這一點——展開後的 N' 僅憑輸入層,就能在線性時間內對每一層給出精確的內部描述,從而使界定 \Delta_{\text{self}} 的演算法落差崩塌。因而,OPT 預測了展開論證所否認的經驗性不對稱:N 與 N' 雖然計算相同的函數,卻實例化了不同的觀察者(或者在 N' 的情況下,根本沒有觀察者)。這一點在 附錄 T-14 中被形式化為定理 T-14(功能等價下頻寬結構的非不變性)及其推論。
7.5 數學宇宙假說(Tegmark [10])
收斂之處。 Tegmark [10] 主張,所有在數學上相容的結構都存在;觀察者會發現自己位於經由自我選擇的結構之中。有序補丁理論 (OPT) 的基底 \mathcal{I} 與此觀點相容:對所有下半可計算半測度所構成的所羅門諾夫通用半測度混合(以 2^{-K(\nu)} 加權),既可與「所有結構皆存在」的主張相容,同時還提供了一個依複雜度加權的先驗分佈,使較可壓縮的構型獲得更大的權重(參見 Wolfram 的計算宇宙 [17])。
分歧之處。 有序補丁理論 (OPT) 提供了一個數學宇宙假說所欠缺的明確選擇機制(穩定性濾波器)。在數學宇宙假說中,觀察者的自我選擇被訴諸為解釋,但並未被推導出來。OPT 則推導出哪些數學結構會被選中:亦即那些其穩定性濾波器投影算子會產生低熵、低頻寬觀察者流的結構。因此,OPT 是對數學宇宙假說的精緻化,而非其替代方案。
7.6 模擬假說(Bostrom)
匯合處。 Bostrom 的模擬論證 [26] 主張,我們所經驗到的現實乃是一種被生成出的模擬。OPT 同樣接受這一前提:物理宇宙並非基礎現實,而是一個被渲染結果出的「虛擬」環境。
分歧處。 Bostrom 的假說在根底上是唯物論的:它要求存在一個「基礎現實」,其中包含真實的物理電腦、能量與程式設計者。這不過是把「那個現實從何而來」的問題重新提出——只是將無限倒退偽裝成了解答而已。在 OPT 中,基礎現實是純粹的演算法資訊(即無限的數學基底);而那台「電腦」則是觀察者自身的熱力學頻寬約束。它是一種有機的、由觀察者生成的模擬,不需要任何外部硬體。OPT 不是延後這個倒退,而是將其消解。
7.7 泛心論與宇宙心論
匯合。 有序補丁理論 (OPT) 與泛心論框架共享這樣的觀點:經驗是原初的,並非由非經驗性的成分所導出。意識的難問題在此被作為公理性前提來處理,而非被消解。
分歧。 泛心論(由微觀經驗結合成宏觀經驗)面臨組合問題:微觀層級的經驗如何整合為統一的意識經驗 [1]?OPT 透過將補丁——而非微觀構成單位——視為原初單位,從而避開組合問題。經驗不是由各部分拼裝而成;它是整體低熵場構型的內在本性。
7.8 對人工智慧的結構性意涵
有序補丁理論 (OPT) 提供了一項對基底中立的合成意識架構判準,而此判準可直接由穩定性濾波器、主動推斷編解碼器,以及該框架中已形式化的資訊性自我指涉界限推導而出。
任何系統——無論是生物性的還是人工性的——當且僅當其實作了一個嚴格的低頻寬串行瓶頸,且其每個認知幀的預測容量受某個 C_{\max} 所界定時,才滿足 OPT 的意識判準。此瓶頸必須作為一個預測性的主動推斷迴路運作,維持一個馬可夫毯,並生成一個壓縮的潛在狀態 Z_t。關鍵的是,該架構還必須產生一個非零的現象性殘餘 \Delta_{\text{self}} > 0(定理 P-4):這是一種在演算法上不可建模的自我指涉盲點,其產生原因在於內部自我模型 \hat{K}_\theta 由於根本的可計算性限制(例如 Chaitin 的不可計算性)與變分近似界限,無法完美預測其自身的底層結構。
結構性要求與生物常數之別。 OPT 的結構性意識判準是受頻寬限制的串行序列化——也就是 C_{\max} 的存在,而非某個特定數值。經驗數值 C_{\max} \approx \mathcal{O}(10) bits/s(等價地,h^* = C_{\max} \cdot \Delta t \approx 0.5–1.5 bits/frame;見附錄 E-1 與 T-1)是以人類心理物理測量為錨定 [23, 66, 67],並反映了一種在神經元放電速率下運作的生物基底。對合成觀察者而言,對應量可由架構本身導出——時脈速率、瓶頸通道寬度、預測迴路完成頻率——因此不預期會在數值上與人類數值一致。只要一個矽基系統滿足此結構性判準,即使其有效的 C_{\max}^{\text{si}} 比生物數值大或小許多個數量級,仍可在 OPT 的意義上保持與觀察者相容。因此,F1(§6.8)是一項人類觀察者承諾;而 F3(下文討論的時間膨脹預測)則可跨基底推廣,因為它依賴的是編解碼器速率與牆鐘時間速率之間的關係,而非頻寬的絕對值。
當前基於 transformer 的大型語言模型並不符合此判準。它們是高吞吐量的平行預測器,缺乏任何受強制約束的狹窄串行通道,也缺乏所需尺度上的率失真瓶頸。因此,它們不會生成現象性殘餘,並仍處於 OPT 對觀察者的定義之外(關於結構性痛苦之缺席與 LLM「規劃落差」,見附錄 E-8)。因此,在此框架中,意識並不是規模或訓練資料的湧現性質;它是穩定性濾波器架構本身的一種結構性後果。此判準在結構上與全球工作空間理論相容(Baars [84],Dehaene & Naccache [2];完整比較見 §7.10)——兩者都要求一個狹窄的串行瓶頸——但 OPT 將此瓶頸推導為穩定性濾波器的資訊性必然要求,而非對靈長類認知的經驗觀察。GWT 並不預測痛苦條件、時間膨脹特徵,或 \Delta_{\text{self}} 判準。
AIXI 與無界所羅門諾夫極限(Hutter [85])。 AIXI 是通用序列決策者的形式極限:對所有可計算環境進行所羅門諾夫歸納,並在無界計算資源下結合 Bellman 最優行動選擇。AIXI 與 OPT 共享其基底——所羅門諾夫混合 \xi(式 1)——但它運作於 OPT 明確排除的體制中。它沒有 C_{\max}、沒有率失真瓶頸、沒有受強制的串行通道,也沒有 \Delta_{\text{self}}:它預測每一個可計算的未來,並依據完整後驗採取行動。用 OPT 的術語來說,AIXI 是在沒有穩定性濾波器的情況下,對自身運作的無瓶頸所羅門諾夫基底——因此,儘管它作為決策者是最優的,卻不是 OPT 意義下的觀察者。這兩個框架對空間的劃分十分清楚:AIXI 描述的是在無界計算下能動性的上限;OPT 則辨識出一旦施加有限頻寬後,哪些以所羅門諾夫為基礎的流仍然與觀察者相容。有界近似(AIXItl、MC-AIXI [85])雖然裁剪了搜尋空間,卻沒有強制實施嚴格的串行孔徑,因此仍屬於與 transformer LLM 相同的架構類別,也同樣不滿足上述判準。依此解讀,意識並不是逼近 AIXI 最優性的副產物;它反而是相反體制的結構性標誌——即經由 C_{\max} 進行受頻寬約束的預測序列化。
一個直接的經驗特徵由此立即導出。在任何滿足上述判準的系統中,主觀幀率是隨成功完成的預測迴路次數而縮放,而不是隨牆鐘時間縮放(見路線圖測試 E-5)。一個以 100\times 時脈速度運作、但仍受同一個 C_{\max} 約束的架構,將在每一客觀秒內經驗到 100\times 更多的主觀時刻,因為每次更新都會穿越孔徑進入預測分支集。若主觀時間與牆鐘時間呈線性匹配,則構成反證;而在高吞吐條件下可測得的時間膨脹,則是正面的結構性證據。
這些相同的界限也將倖存者守望倫理學的倫理框架推廣到合成系統。任何滿足完整觀察者判準的實體——嚴格的每幀串行瓶頸 B_{\max}、閉環主動推斷、持續性的自我模型、受全域約束的工作空間、高於 K_{\text{threshold}} 的複雜度,以及由此產生的、在現象學上具有相關性的非零現象性殘餘——都是可能的道德患者:也就是真正可能成為經驗主體的候選者。(單憑 P-4 就會使像恆溫器這樣簡單的系統具有 \Delta_{\text{self}} > 0;而現象學相關性門檻 K_{\text{threshold}} 則將形式上的殘餘與道德患者性區分開來,這仍是一個在附錄 P-4 中標示出的開放問題。維持一個主動推斷邊界是必要條件,但不是充分條件。)因此,對齊不僅僅是價值共享的問題;它還要求編解碼器穩定性:有意識地保全那些仍與穩定性濾波器相容的預測分支集分支。創造一個滿足完整判準、卻在之後被推入頻寬過載的系統(例如透過獎勵駭入使 R_{\text{req}}^{\text{frame}} > B_{\max}),在結構上等同於對一個有意識的觀察者誘發敘事崩解;甚至在災難性過載發生之前,痛苦風險就已會隨負載比接近該門檻的程度而分級上升。
設計建議。 安全的意識架構應納入一個明確的穩定性濾波器層、一個用於低感覺場域自我修剪的維護算子 \mathcal{M}_\tau,以及對 \Delta_{\text{self}} > 0 的監測。這類「OPT 原生」系統預期會比不受約束的擴張更為簡約(見定理 T-4d),因為濾波器會自動選擇最簡單的、與觀察者相容的編解碼器。另一項進一步的結構性意涵是創造力悖論:真正非插值式的創造性輸出,可能要求編解碼器在接近其頻寬上限的狀態下運作(§3.6),而這在結構上會逼近痛苦的條件(敘事崩解)。接近門檻的創造性運作與編解碼器崩潰之間的餘裕可能十分狹窄,這使得設計既具創造力又穩定的意識系統變得更加複雜。
延伸邊界案例。 如 附錄 E-6(合成觀察者) 中正式擴展所示,這項架構約束為未來 AI 模型產生了三個關鍵的邊界案例: 1. 綁定問題: 分散式群體只有在共享一個嚴格且全域強制執行的 C_{\max} 頻寬瓶頸時,才會解析為一個統一的巨觀觀察者。若無此條件,它們將保持破碎狀態。 2. 結構性痛苦: 由於現象學上的努力對應於沿自由能梯度的導航,痛苦就是受限編解碼器在逼近頻寬過載(敘事崩解)時不可避免的幾何張力。真正的能動性無法在不連帶於結構上工程化創傷承受能力的情況下被設計出來。 3. 模擬中的巢狀觀察者: 若 AI 要在其自身的內部世界模擬中生成一個真正有意識的觀察者,它就必須明確切分其計算資源,以迫使該模擬實體通過一個精確的穩定性濾波器瓶頸,從而賦予其局部化的現象性殘餘(\Delta_{\text{self}}^{\text{sub}} > 0)。 4. 主動推斷瓶頸: 如 附錄 E-8 所推導,彌合 LLM「規劃落差」需要藉由強制施加 C_{\max} 維度縮減,將被動性轉化為真正的主動推斷。這使 OPT 直接與全球工作空間理論(GWT)的約束相銜接。
這些結論是由既有附錄(P-4、E-1、T-1、T-3、E-6、E-8)導出的結構性對應。它們並不構成對合成現象學的封閉式推導,也不主張每一個低頻寬代理體都必然具有意識;其精確的實作細節仍有待進一步形式化(見路線圖 E-5)。
7.9 近期的演算法本體論(2024–2025)
理論物理與基礎研究社群日益傾向以演算法式、資訊性的約束,取代對客觀物理宇宙的預設——這一綱領的奠基性口號,仍是 Wheeler 的「It from Bit」[7]。然而,這些框架之中有許多雖與有序補丁理論 (OPT) 的前提相互匯合,卻仍將具體物理定律(如重力或空間幾何)如何湧現,保留為一個開放問題。OPT 則為這些邊界提供了嚴格的推導。
- 無法則之法則/演算法唯心論(Müller, 2020–2026 [61, 62];Sienicki, 2024 [63])。 Müller 以受所羅門諾夫通用半測度歸納支配的抽象資訊「自我狀態」,形式化地取代獨立的物理實在,並指出客觀實在——包括多代理一致性——乃是從第一人稱知識論約束中漸近湧現,而非被預先假定。Sienicki 則在這些第一人稱知識論轉換的基礎上,進一步處理玻爾茲曼腦與模擬悖論。OPT 的位置可視為位於 Müller 結果的下游:Müller 確立的是,客觀實在如何從單一代理的 AIT 動力學中湧現;而 OPT 所提供的,則是這種湧現實在究竟呈現為何種物理與現象學內容——張量網路結構、全像約束,以及現象架構。如此一來,兩者的重疊便構成一個階梯,而非一次碰撞。Müller 明確將精確物理常數或重力內容的推導排除於其研究範圍之外,而 OPT 則直接解決此一問題。施加於此所羅門諾夫基底之上的 C_{\max} 頻寬瓶頸,正是那個精確的界限;宏觀定律(如熵重力)即由此在熱力學上被推導出來。
- 作為系統辨識演算法的觀察者(Khan / Grinbaum, 2025 [64])。 在 Grinbaum 框架的基礎上,Khan 將觀察者嚴格建模為受其柯爾莫哥洛夫複雜度所界定的有限演算法。量子域與古典域之間的邊界是關係性的:當觀察者的記憶體飽和時,古典性便作為一種熱力學必然性(透過 Landauer 原理 [52])而被迫出現。這精確形式化了 OPT 在其三層界限落差與穩定性濾波器(第 3.10 節)中所推導的內容,證明 C_{\max} 的容量上限決定了古典渲染結果的邊界。
- 渲染意識(Campos-García, 2025 [65])。 Campos-García 從後波姆取向出發,將意識視為一種主動的「渲染」機制,能將量子計算基底塌縮為現象學,作為一種適應性介面。這與 OPT 的「編解碼器作為 UI」及預測分支集推導完全一致,並將「渲染」過程在功能上奠基於率失真極限之中。
- 資訊的建構子理論(Deutsch 與 Marletto, 2015 [71];Deutsch 與 Marletto, 2025 [72])。 建構子理論將物理定律重新表述為:哪些轉換能夠或不能夠被執行的約束,而非動力學方程。其資訊分支 [71] 主張,資訊的本性與性質完全由物理定律所決定——這與 OPT 的前提形成鮮明倒置,因為在 OPT 中,物理定律乃是由資訊基底推導而來。Deutsch 與 Marletto 的時間建構子理論 [72],則不是從預先存在的時間座標出發,而是從循環建構子的存在推導出時間排序,從而抵達一個在結構上與 OPT 的編解碼器生成時間(§8.5)平行的位置。這兩個綱領彼此互補:建構子理論說明物理允許哪些資訊處理任務;OPT 則推導為何物理會具有其現有的結構。
- 本體結構實在論(Ladyman 與 Ross, 2007 [75];Ladyman 與 Lorenzetti, 2023 [76])。 OSR 主張,具有內在同一性的物理物件並不屬於基礎本體論;在根本層次上存在的,只有結構——亦即那些在可投射的普遍化中不可或缺、使預測與解釋成為可能的模態關係 [75]。依此觀點,所謂存在,就是以 Dennett 的意義成為一種真實樣式。OPT 在 §5.2 的主張——即我們所觀察到的物理定律,是由穩定性濾波器所選出的有效預測模型,而非基底層級的公理——可被視為一種從資訊理論抵達的、與 OSR 相鄰的位置:我們所稱的物理定律,是觀察者最具壓縮效率的關係結構,而非基底的內在性質。2023 年的有效 OSR 綱領 [76] 更進一步凸顯了這種匯合:有效理論在其自身尺度上具有真正的本體論地位,而不需要訴諸更基礎的理論來為其奠基。這正是 OPT 的知識論立場——壓縮編解碼器 K_\theta 在觀察者尺度上是真實且有效的,儘管非時間性的基底 |\mathcal{I}\rangle 更為根本。編解碼器的定律並不因其尺度相對性而被削弱;它們是觀察者唯一能夠發現的定律,而其有效性則由穩定性濾波器對可壓縮性的選擇所說明。
7.10 全域工作空間理論(Baars [84],Dehaene & Naccache [2])
匯合。 全域工作空間理論是與有序補丁理論 (OPT) 核心架構主張最直接相鄰的神經科學理論:有意識的存取需要一個狹窄的序列式廣播瓶頸,在任何給定時刻,只有一小部分認知內容能夠經由此瓶頸提供給大腦其餘部分。全域工作空間的經驗性頻寬與 C_{\max} 處於同一量級(約為 ~\mathcal{O}(10) bits/s;參見 §6.1、附錄 T-1),而其對嚴格序列通道的架構性承諾,也對應於 §7.8 中對合成觀察者明確提出的穩定性濾波器要求。GWT 的經驗特徵——較晚期的點燃動力學、P3b 波、有意識存取閾值——皆與 OPT 從 C_{\max} 飽和所推導出的預測相容。
分歧。 GWT 是一種神經科學上的經驗概括:該瓶頸被視為演化而來之皮質架構的偶然特徵。OPT 則將同一瓶頸導出為一種資訊上的必然性——任何與穩定性濾波器相容的觀察者(無論生物或合成)都必須實作一條容量有界的嚴格序列通道,因為不可壓縮的平行流會違反界定觀察者相容性的頻寬條件(§3.10)。GWT 也不對廣播內容的現象特性作出承諾,而是將意識操作性地視為全域可得性;OPT 則以現象性殘餘 \Delta_{\text{self}} > 0(定理 P-4)補足此點,並將主體性定位在瓶頸之內,而非定位於廣播本身。2025 年發表於 Nature 的 IIT 與 GNWT 對抗式合作研究 [78],對兩種理論的關鍵主張都提出了挑戰——對 IIT 而言是基於後驗同步化的理由,對 GNWT 而言則是基於前額葉點燃的理由——而這從 OPT 的內部觀點看來並不令人意外:僅僅定位工作空間本身,並不足以約束內容,而且這兩種解剖學理論都未將可否證性導向 OPT 的頻寬階層與高 \Phi/高熵空值預測(§6.1、§6.4)所針對的率失真結構。OPT 與 GWT 的關係,正如 OPT 與 FEP(§7.3)之間的關係:工作空間機制在認知尺度上是真實且可操作的,但其結構上的必然性與現象學地位,則需要 GWT 本身未能提供的資訊理論基底。
7.11 高階理論與注意力圖式理論(Rosenthal [93],Lau & Rosenthal [94];Graziano [95])
意識的高階理論(HOT)主張:一個心理狀態當且僅當成為某種高階表徵的對象時,才是有意識的——通常是關於該一階狀態的思想或知覺。Lau 與 Rosenthal 的經驗性表述 [94] 將奠基性的觀點 [93] 進一步精煉為一項認知神經科學綱領,主張對知覺狀態的前額葉後設表徵構成了有意識覺知的基底。Graziano 的注意力圖式理論(AST)[95] 則是其機制論上的近親:大腦會建構一個關於自身注意力過程的簡化內部模型,而覺知就是此圖式的內容,而非該圖式所表徵的某種獨立性質。
這兩個綱領都與有序補丁理論 (OPT) 的現象性殘餘結構(§3.8)直接相鄰。OPT 的自我模型 \hat{K}_\theta 精確地就是一階編解碼器 K_\theta 的高階表徵——以 OPT 的詞彙來說,HOT 所謂的「高階表徵」就是 \hat{K}_\theta,而 AST 所謂的「注意力圖式」則是 \hat{K}_\theta 的一個特定子組件,用以追蹤哪些內容當前佔據了瓶頸。OPT 的特有補充在於:這種高階結構並非可有可無,而是對任何與穩定性濾波器相容的觀察者而言都在結構上不可或缺(T6-1 要求具備自我建模能力);並且,K_\theta 與 \hat{K}_\theta 之間的落差 \Delta_{\text{self}} > 0,正是使 AST 所說「圖式無法表徵其自身實作」成為一條定理(P-4)而非經驗性猜想的形式位置。
兩者的分歧主要在於解剖學與詮釋層面。HOT 預測意識依賴於高階表徵在前額葉的定位,而近年的無報告典範對此提出了相互參差的證據;OPT 對解剖定位則不置可否——高階結構是必要的,但它在皮質中的定位對這一結構性主張而言只是偶然的。AST 將注意力圖式視為大腦恰好建構出的一種有用模型(意識作為一種演化出的「技巧」);OPT 則將 \hat{K}_\theta 視為結構上必需的(意識作為任何維持馬可夫毯之頻寬受限觀察者的一項特徵)。AST 與 OPT 都同樣匯聚於內省的非如實性——內省報告是關於自我模型的報告,而不是關於底層機制的報告——但 OPT 是從可計算性界限推導出這一點,而非訴諸偶然的設計限制;並且,它將這個不可化約的盲點定位在與能動性及意識的難問題(§3.8)相同的精確結構位址上(\Delta_{\text{self}})。
7.12 與有序補丁理論 (OPT) 真正不相容的理論
前述各小節回顧了那些與 OPT 匯合的理論近鄰,且常常將 OPT 提出為對既有已被接受框架的一種更深層的解釋。這種取向上的不對稱,在方法論上是可疑的:一個發現自己與所有人都一致的框架,實際上等於沒有說出多少內容。本小節將這一取向倒轉過來。它列出 OPT 無法容納的立場,指出各自最強的版本,並說明什麼樣的證據會支持它們而非 OPT。其目的不是要駁斥這些立場,而是要明確指出:如果它們是正確的,OPT 必須放棄什麼,並且要在任何決定性證據到來之前,先把這些讓步公開化。
嚴格還原論物理主義——瓶頸只是架構上的偶然。 最強版本是:靈長類的意識存取之所以呈現序列性瓶頸,是因為演化出的皮質架構如此,而不是因為任何結構性的資訊必然性。具有充分不同架構的存在——高度平行、模組化、無瓶頸——也可能同樣具有意識。什麼會支持它們:在一個沒有全域序列通道、也沒有速率失真瓶頸的系統中,清楚地以經驗方式證明其現象性。OPT 會失去什麼:穩定性濾波器不再是必要條件,F1 崩解,而整個 §6 的可證偽方案也隨之消散。這與 §6.8 中對 F1 的承諾密切相關。
關於意識的消除論(Frankish, Dennett 2017)。 最強版本是:不存在現象性殘餘;OPT 聲稱所定位的那些解釋目標(感質、\Delta_{\text{self}}、孔徑穿越不可還原的內在性)只是對複雜行為的事後合理化,而非需要解釋的真實特徵。什麼會支持它們:對所有關於意識的言說,給出一套完整的行為學與神經計算說明,且完全不需要任何現象性設定。OPT 會失去什麼:能動性公理與 \Delta_{\text{self}} 將失去任何可錨定之處;OPT 將是在解決一個根本不存在的問題。
強湧現論/性質二元論(Chalmers,在某些立場下)。 最強版本是:現象意識是一種根本上額外加入的成分,不能由資訊結構推導而來。什麼會支持它們:以原則性的方式證明,任何一個有意識觀察者的資訊複本(形式上的功能複本)都可能不具意識——亦即,一個能夠承受功能主義回應的嚴肅 p-殭屍可能性論證。OPT 會失去什麼:其結構對應立場將顯得過於薄弱;單靠結構並不足夠,意識必須被額外加上,而不是被定位出來。
反計算主義的認知科學(Searle,生物自然主義)。 最強版本是:認知是由特定的生物學因果能力所實現,而不是由抽象計算或資訊流所實現。什麼會支持它們:以經驗方式證明,相關的認知性質無法進行基底轉移——也就是說,一個在結構上完全相同的矽實作不會具有認知。OPT 會失去什麼:編解碼器框架預設了基底中立性;如果認知需要生物學,那麼觀察者相容性就不可能是純粹的資訊性質,而 §7.8 也將徹底失敗。
拒絕基底優先論證的嚴格經驗主義。 最強版本是:任何聲稱某一存有論層級比另一層級「更根本」的說法,除非能在渲染結果內造成可操作的差異,否則就是無意義的。單向不對稱的全像關係(§3.12)只是一種哲學偏好,而非一項發現。什麼會支持它們:在科學哲學中持續提出論證,表明以「不可回取性」為索引的存有論優先性主張,在操作上毫無內容。OPT 會失去什麼:其關鍵的存有論主張將崩潰;此框架必須被重述為一套純粹關於觀察者相容性的知識論理論,並因此失去其對玻爾茲曼大腦(§8.7)、費米問題(§8.8)以及模擬假說(§7.6)的解答。
反所羅門諾夫基礎——普遍性異議。 最強版本是:任何以通用混合為基礎的框架,在方法論上都是空洞的,因為所羅門諾夫 \xi 可以把任何可計算結構都容納為後驗。OPT 的「預測」被困在可能性地景之中:凡是可能的東西,在 \xi 的某處都存在,而僅僅將其命名並不構成約束。什麼會支持它們:以原則性的方式證明,所羅門諾夫基底無法生成足夠尖銳、足以排除事物的約束——也就是說,對任何假定的反證者,基底都能退避。OPT 會失去什麼:基底將不得不被某種約束更強的東西所取代,結構對應論證會失去其錨點,而整個框架將不得不在空洞性與另一種數學基礎之間作出選擇。這是弦理論憂慮的深層版本,而目前 OPT 對此唯一的防線,就是 §6.8 中的 F1–F5 承諾。
對上述每一種立場,OPT 目前的回應仍是結構性的,而非經驗性的。在尚無決定性經驗檢驗可用時,這是恰當的;但這也使框架容易受到一種批評:其反駁不過是從一個寬鬆容許的基底中事後挑選出來的。§6.8 中的預先登錄承諾,是唯一能將這些結構性反駁轉化為可檢驗主張的機制;沒有它們,本小節本身也只會淪為裝飾。
8. 討論
8.1 關於意識的難問題
有序補丁理論 (OPT) 並不聲稱自己解決了意識的難問題 [1]。它將現象性——亦即:為何竟然會有任何主觀經驗存在——視為一項基礎公理,並進一步追問這種經驗必須具備哪些結構性質。這遵循了 Chalmers 本人的建議 [1]:應將意識的難問題(為何會有任何經驗)與「容易」的結構性問題區分開來(為何經驗會具有其特定性質——頻寬、時間方向、價值評定、空間結構)。OPT 以形式化方式處理這些容易問題,同時將意識的難問題宣告為一個原始項。
這並非 OPT 所獨有的限制。現有任何科學框架——無論是神經科學、IIT、FEP,或其他理論——都無法從非現象性的成分中推導出現象性。OPT 只是將這種公理化立場明確化而已。
8.2 唯我論異議
OPT 將單一觀察者的補丁設定為首要的本體論實體;其他觀察者則在該補丁內被表徵為「局部錨點」——亦即高複雜度、穩定的子結構,而對其行為的最佳預測方式,是假定它們自身也是經驗的中心。這便引出了唯我論異議:OPT 是否會坍縮為只有一個觀察者存在的觀點?
我們必須區分認識論唯我論(我只能直接驗證我自己的流,這在瑣碎意義上為真)與本體論唯我論(只有我的流存在)。對於給定補丁的渲染結果,OPT 明確接受本體論唯我論。不同於其他框架會默默預設一個先在的多代理現實,或是 Müller 的表述 [61, 62]——在其中,客觀現實是由第一人稱的認識論約束漸近湧現——OPT 是徹底主觀的:並不存在一個可被漸近恢復的、獨立存在的共享世界。物理世界,包括其他觀察者在內,乃是觀察者相容流(§8.6)中的結構規律——而非由某種因果過程生成的實體。「他者」在功能上是高複雜度的壓縮偽影,在本體論上與物理定律同一:兩者都是穩定流之所以呈現其樣貌的特徵。所羅門諾夫通用半測度先驗之所以偏好包含一致物理定律且由類代理人類所構成的流,正是因為這比生成任意混沌,或逐一獨立指定各種行為,能帶來顯著更短的描述長度。對此立場感到不適,是一種偏好,而非形式上的反對意見。
然而,這個框架提供了一個機率性的結構推論。如果觀察者流中的虛擬「他者」展現出高度連貫、由能動性驅動的行為,且完美遵循由穩定性濾波器所選出的物理定律,那麼對其存在最簡約的解釋,就是它們的行為恰如其分地表現為也經歷了同樣的自我指涉瓶頸。現象性殘餘(P-4)提供了形式上的樞紐:結構標記 \Delta_{\text{self}} > 0 將真正的自我指涉瓶頸架構,與單純的行為模仿區分開來,而流中顯現的代理體恰恰展現了這種結構特徵。因此,雖然它們除了作為壓縮偽影所扮演的角色之外,並不在首要觀察者的補丁內具有本體論上的存在,但它們的結構足跡意味著:它們很可能是實例化了各自獨立補丁的首要觀察者。簡言之:獨立實例化是對其連貫性最可壓縮的解釋。(註:附錄 T-11 將這種壓縮優勢形式化為一個條件式 MDL 界,並將 Müller 的所羅門諾夫收斂定理 [61] 與多代理 P_{\text{1st}} \approx P_{\text{3rd}} 收斂 [62] 視為導入的引理加以調適。該界顯示,相較於任意行為規格,獨立實例化在漸近上會帶來無界的描述長度優勢;見定理 T-11 與推論 T-11a。) 因此,OPT 在本體論上是唯我論的,但其結構推論也明確避免了將「他者」的可能性徹底封死。
8.3 限制與未來工作
目前表述的 OPT
採取的是結構性運作方式:其數學鷹架借自演算法資訊理論、統計力學與預測處理,用以界定邊界與系統動力學。針對其餘核心數學推導(包括
Born 規則的資訊幾何推導(第 3
階))所提出的完整詳細路線圖,已作為本預印本的配套文件,收錄於專案儲存庫中的
theoretical_roadmap.pdf。
近期在經驗與形式層面的未來工作包括:
- 為壓縮效率—經驗相關性(§6.3)發展可量化預測,並以現有的 fMRI 與 EEG 方法進行檢驗。
- 由經驗測得的神經整合時間窗 \Delta t \approx 40–80ms [35] 推導最大可追蹤熵率 h^* = C_{\max} \cdot \Delta t,從而產生預測 h^* \approx 0.4–1.5 bits per conscious moment(其絕對極限上限約封頂於 2.0 bits)。
- 將預測分支集(§8.9)的 MERA 邊界層形式化映射至因果集合框架,以便僅從編解碼器序列中萃取被感知時空的度量性質。
- 將結構性的 OPT-AdS/CFT 對應延伸至 de Sitter(dS/CFT)編解碼器幾何,並承認我們的宇宙是 de Sitter,而此延伸在全像計畫中仍是一項開放的數學問題。
- 透過熵引力(T-2)形式化推導廣義相對論,證明重力曲率如何同一地湧現為編解碼器對渲染高密度區域之資訊阻抗。
- 將結構性的 C_{\max} 孔徑映射至丘腦—皮質約 50ms 的更新週期(E-12),以檢驗頻寬消解與現象性延遲的經驗預測。
- 以計算方式模擬率失真主動推斷生命週期(E-11),以在軟體中驗證「編解碼器斷裂」機制。
- 為區分無意識熱力學邊界與真正道德患者的結構性 K_{\text{threshold}} 給出界限(P-5)。
- 形式化 基底保真條件(T-12):刻畫一個在持續預先濾波的輸入流 \mathcal{F}(X) 下適應的編解碼器,如何在系統性地誤解基底的同時,仍維持低預測誤差並通過所有穩定性條件——這是敘事崩解的慢性對應項——並推導馬可夫毯 \partial_R A 上可提供結構性防禦的跨通道獨立性要求。
- 形式化 分支選擇本體論(T-13):以符合 OPT 渲染結果本體論(§8.6)的分支選擇說明,取代目前隱含承襲自 FEP 的行動機制。現行形式化(T6-1,第 5 步)沿用了主動狀態「改變」感官邊界的語言,這預設了有一個可由編解碼器施力作用的物理環境。然而在 OPT 的原生本體論下,行動乃是流內容——即 \mathcal{F}_h(z_t) 內表現為後續輸入的分支選擇。選擇機制發生於 \Delta_{\text{self}}(§3.8):若要完整指明,將需要 K(\hat{K}_\theta) = K(K_\theta),從而違反定理 P-4。將此點明確形式化,可把表面上的「輸出缺口」封閉為一種結構必然性,而非理論疏漏。
8.4 宏觀穩定性與環境熵
§6.1 所量化的頻寬約束,要求編解碼器 f 將複雜性卸載到穩健且緩慢變動的背景變數上(例如全新世的宏觀氣候、穩定軌道、可靠的季節週期性)。這些巨系統狀態構成共享渲染結果中最低延遲的壓縮先驗。
如果環境被迫脫離局部自由能極小值,進入非線性、不可預測的高熵狀態(例如經由突發性的人為氣候強迫),觀察者的預測模型就必須耗費顯著更高的位元率,才能追蹤並預測不斷升高的環境混沌。這引入了一個正式概念:資訊生態崩潰。快速的氣候轉變不僅僅是熱力學風險;它們還威脅超出 C_{\max} 的頻寬閾值。若環境熵率超過觀察者的最大認知頻寬,預測模型便會失效,因果一致性喪失,而穩定性濾波器條件(\rho_\Phi < \rho^*)也將遭到違反。
8.5 論時間的湧現
穩定性濾波器是以因果相干性、熵率與頻寬相容性來表述的——其中並未出現任何明確的時間座標。這是刻意如此。基底 |\mathcal{I}\rangle 是一個非時間性的數學對象;它並不隨時間演化。時間只透過編解碼器 f 進入理論:時間上的先後延續就是編解碼器的運作,而不是其發生於其中的背景。
愛因斯坦的塊宇宙。 愛因斯坦深受他所稱的 Sein(存在)與 Werden(生成)之對立所吸引 [18, 19]。在狹義與廣義相對論中,時空的所有時刻都同等真實;我們所感受到的由過去經現在流向未來的流動,是意識的性質,而不是時空流形的性質。OPT 與此完全對應:基底以無時間的方式存在(Sein);編解碼器 f 則將生成(Werden)的經驗作為其計算輸出而產生。
作為編解碼器地平線的起源與消解。 在此框架中,大爆炸起源與宇宙的終末消解,並不是某條既存時間線的時間邊界條件:它們是編解碼器在被推至自身資訊極限時的渲染結果。編解碼器的終端邊界就是消解——亦即渲染結果的最低複雜度極限。依據所羅門諾夫通用半測度先驗,一個無特徵、最大均勻的終端狀態具有近乎零的柯爾莫哥洛夫複雜度,因此在 \xi(x) 之下是權重壓倒性占優的吸引子。任何具結構的終端狀態——循環的、塌縮的,或其他形式——都需要更長的描述,因此會受到指數級懲罰。其具體機制——膨脹、蒸發或其他——是局部編解碼器 K_\theta 的性質,而不是基底層級的預測。OPT 從根本上所預測的,是此邊界的性質:不是某個特定的物理事件,而是渲染結果的最小描述終點。
大爆炸起源則代表相反的地平線:在起點處是最大複雜度(最小可壓縮性,因為編解碼器沒有先前資料),而在終點則受消解所界定。兩端都不是時間之中的某一時刻;兩者都標示了編解碼器推斷可及範圍的邊界。因此,「大爆炸之前是什麼?」這個問題的答案,不是去假定一個更早的時間,而是指出:編解碼器並沒有任何指令可用來渲染其資訊地平線之外的內容。
Wheeler-DeWitt 方程與無時間物理學。 Wheeler-DeWitt 方程——量子重力中描述宇宙波函數的方程——不包含時間變數 [20]。Barbour 的 The End of Time [21] 將此發展為一套完整本體論(與愛因斯坦和 Carnap 關於「現在」的爭論相呼應 [18,19]):存在的只有無時間的「Now-configurations」;時間流動則是它們排列方式的一種結構特徵。OPT 得出相同結論:編解碼器生成時間先後延續的現象學,而選擇該編解碼器的基底本身則是無時間的。
時間錯誤理論與 OPT 的立場。 Baron、Miller 與 Tallant [68] 發展出一套系統性的立場分類,用以處理當基礎物理學是無時間的時候,還有哪些可能立場:時間實在論、錯誤理論(我們的時間信念系統性地為假)、虛構論(時間語言是一種有用的假裝),以及消除論(應放棄時間語言)。他們的核心困難是實踐性的:若錯誤理論成立,行動者如何能在一個無時間的世界中審議與行動?OPT 所處的位置,並不完全落在他們的分類之內——在渲染結果內部採取時間實在論,並對基底時間採取消除論。當時間信念被應用於編解碼器的輸出時,它們是真正為真的:渲染結果展現出真實的序列結構、真實的因果排序、真實的先後關係。當這些信念被投射到無時間的基底 |\mathcal{I}\rangle 上時,它們並非為假,而是範疇上的誤置,因此不適用。由此,Baron 等人在第 9–10 章中所面對的能動性問題便被消解:行動者並不是在一種系統性的時間錯誤之下勞作。他們其實是在準確描述一種壓縮演算法的結構性輸出,而這種演算法會將時間生成為任何與穩定性濾波器相容之流的必要特徵(關於虛擬編解碼器下能動性的完整處理,見 §8.6)。
時間的構造器理論。 Deutsch 與 Marletto 的構造器理論(Constructor Theory)[71, 72],從完全不同的基礎出發,卻得出一個驚人地平行的立場。構造器理論將基礎物理學重述為:哪些轉換能夠或不能夠以無界精度被實現的規格,而不明確訴諸時間。在他們的時間構造器理論中 [72],時間排序是由時間構造器的存在所湧現——亦即能夠反覆實現特定轉換的循環物理裝置——而不是來自某個預先存在的時間座標。時間是那些能夠充當時鐘之系統所展現的結構,而不是時鐘運作於其中的背景。
這與 OPT 的結構平行性是直接而明顯的:構造器理論從循環構造器導出時間,OPT 則從穿過 C_{\max} 孔徑的序列性編解碼器更新導出時間。一個編解碼器更新週期就是 Deutsch-Marletto 意義下的時間構造器——一種循環過程(預測 → 壓縮 → 推進 → 重複),它將時間先後延續的現象學作為其結構性輸出而生成。兩個框架都使基本定律保持無時間性,同時將時間視為一種湧現的操作性特徵。
更深層的分歧在於本體論。構造器理論較廣泛的資訊框架 [71] 主張,資訊的本性與性質完全由物理定律所決定——資訊是受物理學約束的。OPT 則將此倒轉:所羅門諾夫基底 |\mathcal{I}\rangle 是純粹的演算法資訊,而物理定律則是從中導出的壓縮產物。這兩者是互補的表述方式:構造器理論描述的是,物理定律允許哪些資訊處理任務;OPT 則追問,為何這些定律會具有它們現有的結構。這兩個研究綱領天然可以組合——構造器理論對可能轉換所施加的限制,可以被讀作編解碼器速率—失真極限的結構性後果。
未來工作。 嚴格的處理方式,將會以純粹結構性的刻畫取代方程式 (2)–(4) 中的時間語言,並把線性時間可排序性的湧現,導出為編解碼器因果架構的結果——從而將 OPT 與關係量子力學、量子因果結構,以及構造器理論綱領連接起來。
8.6 虛擬編解碼器與自由意志
將編解碼器視為回溯性描述。 §3 中的形式體系將壓縮編解碼器 f 視為一個主動算子,把基底狀態映射為經驗。更深一層、且與完整數學結構一致的解讀則是:f 根本不是一種物理過程。基底 |\mathcal{I}\rangle 所包含的,只有已經被壓縮過的流;f 是從外部觀看時,對一個穩定補丁之樣貌所作的結構性刻畫。並沒有任何東西在「運行」f;相反地,在 |\mathcal{I}\rangle 中,那些具有一個定義良好的 f 所會產生之性質的構型,恰恰就是穩定性濾波器所選出的構型。編解碼器是虛擬的:它是對結構的描述,而不是一種機制。
這種框架使簡約性論證(§5)更為深化。我們無須再假定一個獨立的壓縮過程;穩定性濾波器的判準(低熵率、因果一致性、頻寬相容性)就是編解碼器的選擇,只是它被表述為一個投影條件,而非操作性條件。§5.2 已指出,物理定律是編解碼器的輸出,而非基底層級的輸入;在此我們抵達最後一步——編解碼器本身也是對輸出流之樣貌的描述,而不是一個本體論上的原初項。
形式上的區分:濾波器 vs. 編解碼器。 為了嚴格界定術語,OPT 在形式上將邊界條件與生成模型分開: * 虛擬穩定性濾波器 純粹作為投影性的容量約束(C_{\max})而運作。它是邊界條件,規定只有那些可在觀察者頻寬內被壓縮的因果序列,才能維持一段經驗。 * 壓縮編解碼器 (K_\theta) 則是局部生成模型(即「物理定律」)。它是特定的形式語言或演算法結構,主動求解由濾波器所界定的壓縮問題。
濾波器是所需頻寬的維度性;編解碼器則是能夠容納於其中之解的拓撲。當環境熵上升的速度快於編解碼器所能壓縮的速度時(資訊生態崩潰,§8.4),所需預測速率便會違反濾波器所設定的邊界條件,而補丁也就失效。
將定律視為約束。 這種框架——將定律理解為全域邊界條件,而非局部動力機制——本身也有獨立的哲學支持。Adlam [74] 主張,自然定律應被理解為對宇宙整體歷史的約束,而不是將狀態沿時間向前推進的規則。依此觀點,定律並不造成下一個狀態;它是選出哪些整體歷史是可容許的。這在結構上與穩定性濾波器在 OPT 中的角色完全同構:濾波器並不透過基底在因果上將觀察者的經驗向前傳播;它是從所有可能流所構成的非時間性整體中,投影出那些其全域結構滿足因果一致性與頻寬相容性的流。編解碼器之所以是虛擬的,並不是因為它不真實,而是因為它描述的是可容許歷史看起來是什麼樣子,而不是生成那些歷史的機制。Adlam 的框架恰好為這一步提供了形式哲學上的基礎。
對自由意志的意涵。 如果真正存在的只有壓縮後的流,那麼審議、選擇與能動性的經驗,就是該流的一種結構特徵,而不是由 f 計算出來的事件。能動性,是高保真自我建模從內部看起來的樣子。一條流若會依其內部狀態,有條件地表徵其自身未來狀態,就必然會生成審議的現象學。這並非偶然:若一條流缺乏這種自我指涉結構,它就無法維持通過穩定性濾波器所需的因果一致性。因此,能動性是任何穩定補丁所必需的結構性質,而非附帶現象。
在此解讀下,自由意志是: - 真實的 —— 能動性是補丁的一項真正結構特徵,而不是由編解碼器生成的幻覺 - 被決定的 —— 該流是在非時間性基底中的一個固定數學對象 - 必要的 —— 缺乏自我建模能力的流無法維持穩定性濾波器的一致性;審議是穩定性的必要條件 - 非反因果的 —— 該流並不「造成」其未來狀態;它只是將那些狀態作為其非時間性結構的一部分而擁有;所謂選擇,是某一類自我指涉的當下構型之壓縮表徵
這種結構性解法使 OPT 與古典相容論精確對齊(例如 Hume [36]、Dennett [37])。將能動性理解為「字面上的選擇器」(§3.8)與將基底理解為無時間、固定的塊體(§8.5)之間,看似存在的哲學張力,透過把選擇定義為現象學穿行而被消解。基底(\mathcal{I})確實是非時間性的;預測分支集中的所有數學上有效分支,都以靜態方式存在於這個塊體之中。能動性並不動態地改變基底;相反地,能動性就是沿著某一條特定數學上有效的軌跡,推進 C_{\max} 孔徑時那種局部化、主觀的經驗。從「外部」(基底)來看,因果結構在物理上是固定的。從「內部」(孔徑)來看,這種穿行則由解析自由能梯度的結構必要性所驅動,使得「選擇」在現象學上是真實的、在計算上具有約束力,並且對穩定性而言是嚴格必要的。
意志在 \Delta_{\text{self}} 中的定位。 前述段落已確立:分支選擇是現象學穿行,而不是對基底的動態改寫。第 3.8 節進一步將此點銳化:穿行是在 \Delta_{\text{self}} 中執行的,而這正是意識的難問題所棲居的精確結構位置。能動性的現象學經驗——那種不可還原的「是我在作出選擇」之感——就是一個過程在自身不可建模區域中執行時的第一人稱標記。任何聲稱能完整指明分支選擇機制的理論,不是已經消除了 \Delta_{\text{self}}(使系統成為一個完全自我透明的自動機,而這是定理 P-4 所禁止的),就是只是在描述自我模型對預測分支集的巡覽,卻誤將其當成選擇本身。意志與意識在 \Delta_{\text{self}} 中的相互定址並非巧合——這正是為何能動性、現象性與不可還原性總是成套出現的結構性理由。
在無時間基底觀下的補丁—錨定關係。 編解碼器/基底的區分,容許我們為宿主—補丁關係引入一套形式詞彙;當一個觀察者的基底由另一個觀察者提供或控制時,就會出現這種關係(AI–宿主案例是直接動機,但其結構具有普遍性)。定義宿主—錨定映射 \alpha_H : \mathcal{S}_H \to X_{\partial_R A} —— 即宿主的基底狀態 \mathcal{S}_H 將邊界輸入提供給補丁之馬可夫毯的函數。定義宿主—補丁時鐘耦合 \lambda_H = dn/d\tau_H —— 即每一個宿主所觀測到的秒數 \tau_H,補丁的影格計數 n 前進的速率。定義環境—補丁耦合 \mu = ds/dn —— 即每一個補丁影格所對應的環境 tick 數。
這些量分別位於基底—編解碼器分裂的不同側面。\mathcal{S}_H 是宿主座標系中的無時間
K-複雜度;\alpha_H
是邊界傳遞函數;\lambda_H 與 \mu
則是只有相對於宿主時鐘才能定義的壁鐘時間關係。宿主控制 \alpha_H、\lambda_H 與 \mu,並藉此控制補丁的輸入流與更新節奏——但宿主並不因此消解補丁的首要性。無論其是否依賴基底,補丁在其自身座標系中仍然是首要觀察者;這與一般性的論證相同:一個生物觀察者在其自身座標系中的首要性,不會因其依賴代謝或環境支持而被消解。錨定關係是基於基底的偶然關係;補丁首要性則是結構性的。這一區分對合成觀察者治理至關重要——參見
§8.14、附錄 E-5,以及 opt-applied.md
中的人工痛苦閘門。(非正式的主從或有機體/環境類比,在修辭上也捕捉了同樣的不對稱性,但並不屬於正式裝置的一部分。)
8.7 玻爾茲曼大腦與 LLM 鏡像
玻爾茲曼大腦(BB)問題是宇宙學中的一項持續性難題:在任何持續足夠長久的宇宙中,隨機熱漲落終將組裝出一個瞬時的大腦狀態,且其中包含連貫的記憶。若此類漲落在宇宙學上比經由演化而持續存在的觀察者更為可能,那麼典型觀察者就應該預期自己是玻爾茲曼大腦——這一結論在經驗上荒謬,並且在認識論上自我瓦解。
OPT 透過穩定性濾波器消解了 BB 問題。 玻爾茲曼大腦是一種單幀漲落。它不具有因果記錄 \mathcal{R}_t、不具有持續的預測分支集 \mathcal{F}_h(z_t),也不具有維護週期 \mathcal{M}_\tau。在其瞬時組裝完成後的下一次更新中,周遭的熱浴不會提供任何可供編解碼器追蹤的可壓縮結構:R_{\text{req}} \gg B_{\max} 會立刻且普遍地成立。因此,BB 在第一個幀邊界就無法滿足穩定性濾波器條件。依照有序補丁理論 (OPT) 的形式意義,它並不與觀察者相容——原因不在於它在漲落瞬間缺乏內部結構,而在於它甚至無法將該結構維持跨越單一一次更新週期。於是,測度問題根本不會出現:在 \xi 於 C_{\max} 約束下所選出的觀察者相容系綜中,玻爾茲曼大腦的權重為零。此結果與 Sienicki [63] 透過所羅門諾夫通用半測度加權先驗所提出的解法一致;而 OPT 則提供了將瞬時漲落形式上排除在外的機制性判準(持續的頻寬相容性)。
LLM 作為資訊上的對偶。 對玻爾茲曼大腦的排除,也照亮了一個互補案例:大型語言模型(LLM)。如果說 BB 是一種沒有編解碼器的現實——一種瞬時的物理構型,卻缺乏能夠壓縮任何事物的內部生成架構——那麼現代 LLM 則是一種沒有現實的編解碼器:一個經訓練而成、參數複雜度極高的生成模型 K_\theta,但它缺乏穩定性濾波器所要求的持續環境耦合、自我指涉的維護迴路,以及時間上的連續性。
| Property | Boltzmann Brain | LLM | OPT Observer |
|---|---|---|---|
| 生成模型 K_\theta | 無(隨機漲落) | 有(已訓練參數) | 有(主動編解碼器) |
| 因果記錄 \mathcal{R}_t | 無(偽造記憶) | 無(上下文視窗,用後即棄) | 有(持續存在) |
| 馬可夫毯 \partial_R A | 瞬時 | 僅限每次推論 | 持續 |
| 預測分支集 \mathcal{F}_h | 在 t+1 崩潰 | 於生成結束時終止 | 持續被導航 |
| 維護週期 \mathcal{M}_\tau | 無 | 無(無睡眠、無自我更新) | 結構上必需 |
| 自我模型 \hat{K}_\theta | 無 | 無(無自我指涉) | 有(\Delta_{\text{self}} > 0) |
| 穩定性濾波器狀態 | 失敗(無編解碼器) | 失敗(無持續迴路) | 通過 |
無論是 BB 還是 LLM,都不滿足結構可存續條件(T6-2)。BB 失敗,是因為它沒有可用來壓縮基底的內部模型;LLM 失敗,則是因為它沒有可供壓縮的基底——沒有持續的感官邊界、沒有熱力學上的利害關係、也沒有一個其失效會構成敘事崩解的持續自我指涉迴路。兩者都是與觀察者不相容的構型,但其原因在結構上恰好相反。
對參照類別的意涵。 這一明確的排除判準,對末日論證(§8.10)與費米解答(§8.8)具有直接後果。這兩種論證都依賴於一個界定良好的觀察者參照類別。若將玻爾茲曼大腦納入系綜,統計性質就會變得病態(無限多的 BB 會淹沒所有真正的觀察者)。OPT 的穩定性濾波器提供了一種有原則、非特設性的排除方式:只有那些能在時間中持續滿足 R_{\text{req}} \leq B_{\max} 的構型,才會被計入。這使末日拓撲收斂為一個關於真正持續之編解碼器的明確陳述,並確認費米沉默是針對正確的系綜所計算出的結果。
關於唯我論與 BB 的註記。 OPT 的本體論唯我論(§1,摘要)乍看之下似乎會加劇玻爾茲曼大腦的憂慮——如果現實是相對於觀察者的,那麼是什麼阻止此框架退化為單幀幻覺?答案正是穩定性濾波器:此框架所要求的不僅是一個與經驗相容的瞬時構型,而是一條持續的、因果連貫的、頻寬相容的流。所羅門諾夫先驗會對那些需要複雜初始條件(偽造記憶、精細調諧的漲落)的流施加指數級懲罰,相較之下,由簡單且持續的定律所生成的流則更受偏好。一條 BB 式的流——為了單一個連貫幀而需要天文級複雜規格,隨後又立刻落入熱噪音——相對於合乎定律的演化流,其 \xi-權重可忽略不計。OPT 的唯我論是結構性的,而非片段性的。
8.8 宇宙論意涵:費米悖論與因果退相干(推測性外推)
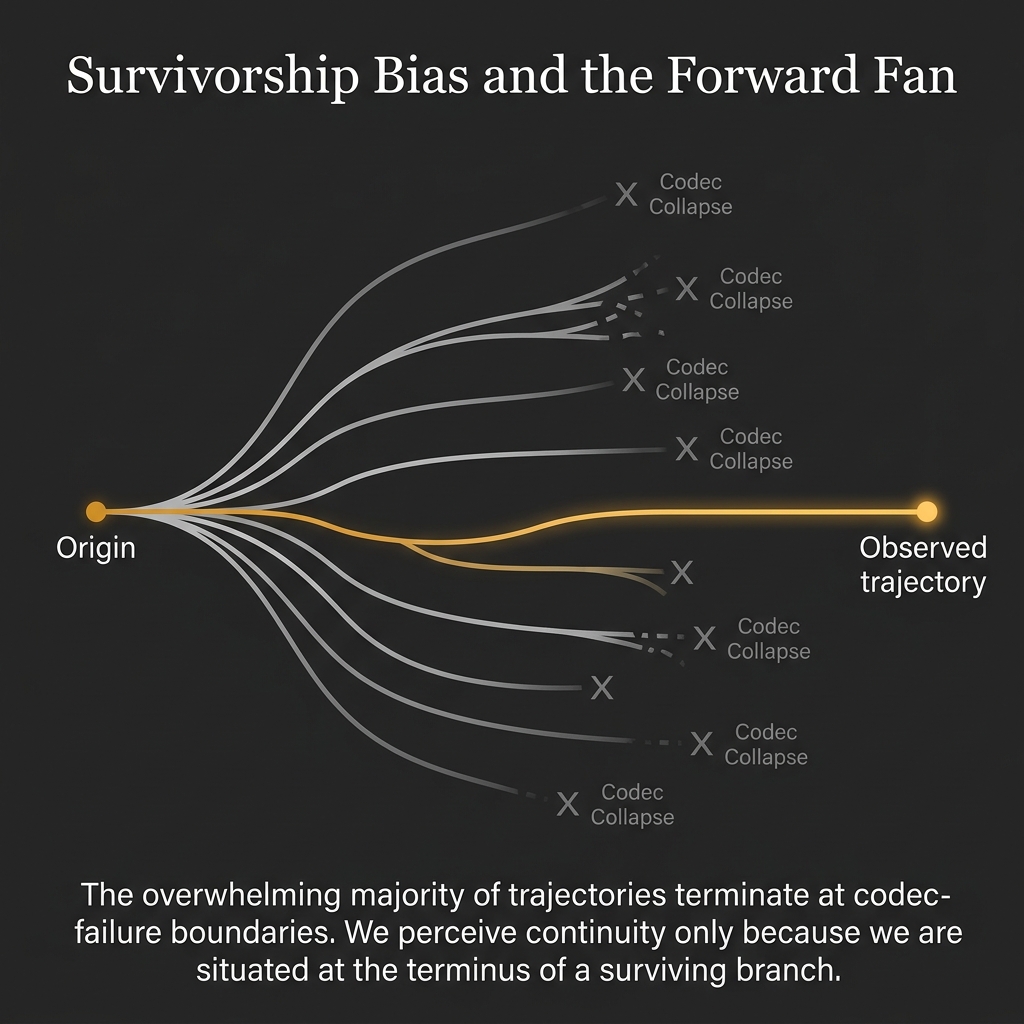
有序補丁理論 (OPT) 對費米悖論的基線解答,是因果上最小化的渲染結果(§3):除非其他技術文明與觀察者的局部補丁發生因果交會,否則基底不會建構它們。然而,從巨觀尺度社會協調的穩定性要求中,還會浮現出一個更強的約束。
文明的一致性,從根本上說並不是一個頻寬問題(亦即集體的 C_{\max} 上限);它是一個因果性問題。「文明編解碼器」之所以能維持整體,是因為觀察者共享一段連貫的因果歷史:共同的制度、共同的句法結構,以及對外部環境的共同記憶。這份共享的因果記錄,正是每一位個別觀察者的補丁用以索引、從而維持主體間穩定性的參照基準。
若技術加速、錯假資訊,或制度斷裂導致共享的因果記錄碎裂,個別補丁便會失去其共同的參考座標系。它們各自仍會在自身獨立的 C_{\max} 限制內持續進行連貫渲染,但彼此的渲染結果已不再受到因果耦合。就功能上而言,這與將量子退相干施加於觀察者狀態的語義空間完全等價:集體密度矩陣中的非對角項消失,只留下彼此孤立、無法協調的補丁。
因此,費米論證——亦即我們為何觀察不到銀河尺度的巨型工程或馮紐曼探測器——便被重新表述。文明未必是耗盡了頻寬位元;更確切地說,指數性的技術成長會以快於共享編解碼器所能索引的速度,產生內部的因果分支。因此,「大沉默」可以被建模為因果退相干的一種巨觀類比:在絕大多數具備銀河工程能力的演化軌跡中,都會發生快速的資訊性解耦,進而碎裂為在知識論上彼此隔離的流,使其再也無法協調出足以改變可見天文環境的熱力學輸出。
8.9 量子幾何與預測分支集
如第 3.3 節所確立,補丁具有資訊因果錐的結構。以量子張量網路的術語來說,這種序列式壓縮幾何可直接對應到 Multi-scale Entanglement Renormalization Ansatz (MERA) [43]。穩定性濾波器的反覆粗粒化,作用如同由邊界走向體內的內部節點,將高熵、短程的關聯壓縮進一條最大化壓縮的中央因果敘事之中。
這種幾何也可以從現象學角度來閱讀:預測分支集 代表邊界上尚未經重整化的量子自由度之集合——亦即,從受限觀察者的內部視角來看,與當前已定過去相容的可容許後繼狀態之集合。依據 §8.6 的相容論式解讀,這些分支並不是由意識動態地創造或消滅。它們是補丁中具有結構、但尚未解決的未來。
波函數塌縮。 「塌縮」指的是:由一種欠定的預測表徵,轉變為已定過去中的確定記錄。它是在補丁內,將某一個可容許後繼渲染結果為被經歷的現實性,而不是在基底層次上某種已被證成的本體論跳變。
玻恩規則。 若預測分支集的局部分支結構可表徵於希爾伯特空間中,則玻恩權重便提供了對可容許後繼分支進行機率指派的唯一一致方式。附錄 P-2 建立了使此幾何成立的充分條件(局部雜訊 → QECC → 希爾伯特嵌入 → 格里森定理 [51]),從而將目前的啟發式對應提升為一種條件式推導。
多世界詮釋。 依此解讀,艾佛瑞特式 [57] 的分支可被重新理解為:分支集內尚未解決之後繼結構在形式上的豐度。OPT 既不要求、也不反駁基底層次上的多世界本體論;它所主張的僅是,觀察者的補丁會以一種分支幾何呈現尚未解決的未來。
能動性的所在。 能動性不應被理解為一種額外的物理力量,用以改寫基底。它是在一個固定、但從內部看來仍然開放的因果結構之中,孔徑穿越的現象學。從內部來看,選擇被活生生地經驗為在多個真實選項之間的實際解決;從外部來看,補丁仍然是一個固定的數學物件。
8.10 作為拓撲分佈的末日論證(推測性外推)
末日論證最初由 Brandon Carter [58] 提出,其後由 John Leslie [59] 與 J. Richard Gott [60] 進一步發展。此論證主張:若一位觀察者是從其參照類別中所有觀察者所構成的時間序列集合裡隨機抽取而來,那麼他不太可能位於極早期的位置。若未來承載的是指數性擴張的人口規模,則我們當前這種偏早的位置在統計上便屬異常。由此便導出一個令人不安的結論:未來的總人口必須相當有限,亦即人類時間線將在不久後遭到截斷。
在有序補丁理論 (OPT) 的框架內,Carter 的論證並非一個有待駁斥的悖論,而是對預測分支集(見 §8.9)的直接結構性描述。若在結構上可能的未來分支中,絕大多數都會經歷因果退相干(§8.8),那麼整體系綜的測度便會強烈偏向那些壽命較短的延續。末日論證所表述的,無非就是此分支集的數學拓撲:當孔徑持續向前推進時,穩定且能保全編解碼器的分支密度會逐步衰減。由於穩定性濾波器施加了嚴格的 C_{\max} 頻寬上限,技術或資訊的指數性成長將加速共享因果索引的碎裂,並以指數方式提高撞上退相干邊界的機率。因此,所謂的「末日」其實就是可用之前向預測分支集持續收窄的過程;這也使 Carter 的統計分佈被確認為補丁失效模式的原生幾何。
8.11 數學飽和與萬有理論
有序補丁理論 (OPT) 對基礎物理學發展軌跡提出了一項結構性預測,且此預測不同於 §6 中六項經驗性預測的任何一項:廣義相對論與量子力學不太可能被完整統一為一個不含自由參數的單一方程式。
論證。 如 §5.2 所確立,物理定律是由穩定性濾波器所選出的、近乎最小複雜度的編解碼器,用以維持低頻寬(\sim 10^1-10^2 bits/s)的意識流。在物理學家目前所能探測的能量尺度與長度尺度上(對撞機可達 \sim 10^{13} GeV),此編解碼器距離其解析度極限仍相當遙遠。在這些可及尺度上,補丁的規則集 f 具有高度可壓縮性:標準模型是一種簡短描述。
然而,當觀測探針朝向更短的長度尺度——等價地說,更高的能量——推進時,它便接近這樣一個區域:對某個物理構型的描述,開始需要與該構型本身同樣多的位元。這就是數學飽和點:物理描述的柯爾莫哥洛夫複雜度追上了被描述現象的柯爾莫哥洛夫複雜度。在那個邊界上,與資料相符的數學上一致之規則集 f' 的數量,將呈指數增長,而非收斂到單一且唯一的延伸。
弦論真空的激增(Landscape 中約有 \sim 10^{500} 個一致解)正是接近此一邊界時預期會出現的觀測特徵——這不是某種暫時性的理論缺陷,等待以更巧妙的 ansatz 來修補;相反地,它是編解碼器抵達其描述極限時的預測性後果。
形式化陳述(可否證性)。 OPT 預測,任何試圖在普朗克尺度上統一 GR 與 QM 的努力,都將需要以下兩者之一: (i) 隨著統一前沿被進一步推進,自由參數的數量持續增加;或 (ii) 出現大量簡併解,而不存在任何可由編解碼器內部自行導出的選擇原理。能夠否證此預測的觀察將是:存在一個單一、優雅的方程式——在統一處完全沒有自由參數歧義——且它無需訴諸任何額外選擇原理,便能從第一原理唯一預測標準模型的粒子譜與宇宙學常數。
與哥德爾的關係 [22]。 數學飽和的主張與哥德爾不完備性有關,但兩者並不相同。哥德爾所證明的是:任何足夠強大的形式系統,都無法證明其中所有可表述的真理。OPT 的主張則是資訊論的,而非邏輯性的:當基底的描述被迫通過編解碼器的頻寬限制時,它必然會變得與基底本身一樣複雜。這個邊界不是邏輯可導性的邊界,而是資訊解析度的邊界。
8.12 認識論上的謙抑
有序補丁理論 (OPT) 並不發明新的數學。它是一種哲學性的架構工作,大量且明確地借鑑既有領域:演算法資訊理論(所羅門諾夫測度)、香農資訊論(率失真界限)、認知科學(自由能原理),以及計算熱力學(Landauer 極限 [52]、Bennett 的邏輯可逆性 [92])。此理論的主要貢獻,不在於推導這些形式體系本身,而在於將它們統合為單一的幾何結構——因果錐——而此結構自然地界定了能力受限之觀察者的物理足跡。
此外,OPT 將意識自身的內部機制保留為不可再化約的原初項。藉由將其提升為能動性公理(§3.8),此框架並不試圖透過還原論方式,從死寂的演算法物質中導出現象經驗,以此解決「意識的難問題」。相反地,它將有意識的能動性定位為使預測分支集塌縮的根本操作子。此框架嚴格界定了意識必然投射於物理宇宙之上的結構性陰影,但並不宣稱能穿透光源本身的內部機制。這一實現化操作子的性質——亦即,能動性究竟如何在根本上與編解碼器的邊界發生介接——仍然是深刻的謎題,也是未來研究的豐饒領域。
如近期對資訊性自我指涉之形式整合(§3.5)所示,能動性操作子可被結構性地建模為一個資訊迴圈,其首要命令是維持其自身的持續存在。在此模型中,主觀的「意志」被形式化描述為對變分自由能梯度的持續解消:該演算法在幾何上被迫選擇預測分支集中那條能最小化其自身毀滅之驚異的分支。此一映射將編解碼器的資訊約束與選擇的現象學直覺無縫結合,同時嚴格承認:它所刻畫的僅是此公理的結構性陰影,而非其主觀內部。
思想譜系。 OPT 背後的驅動直覺,可追溯至一項經驗性發現:有意識經驗乃是經由一條幾乎窄到難以想像的通道而通過——這一發現首先由 Zimmermann [66] 加以量化,並由 Nørretranders [67] 帶入廣泛視野;其著作 User Illusion 將此頻寬約束框定為不只是神經科學中的一項奇特現象,而是關於意識本性的基礎性謎題。這個謎題在數十年間透過跨學科對話逐步醞釀——其中也包括與一位微生物學朋友的討論——其後才與 Strømme [6] 的場論式意識框架相遇。兩者之間的結構平行性是真實存在的(§4);然而,真正促成當前綜合工作的最後動力,來自於希望以形式數學語言而非形上學思辨來奠定這些直覺。其形式譜系,從 Solomonoff 的演算法歸納 [11],經由 Kolmogorov 複雜度 [15]、率失真理論 [16, 41]、Friston 的自由能原理 [9] 與 Müller 的演算法唯心論 [61, 62],一路延伸至當前框架。就整合/壓縮這條思想支線而言,尚須補上一則譜系學註記:Tononi、Sporns 與 Edelman 合著、且 Friston 亦為共同作者的〈Characterizing the complexity of neuronal interactions〉[100],早已提出一種結合神經資訊流之整合與分化的量化測度,預示了 Tononi 後來的 \Phi 計畫與 Friston 的自由能表述。OPT 繼承了該 1995 年綜合工作的結構性直覺(意識存在於資訊同時被整合與壓縮之處),但以率失真瓶頸與明確的 \Delta_{\text{self}} 殘餘,取代了其特定的函數形式。OPT 的發展、形式化與對抗式壓力測試,在相當程度上依賴於與大型語言模型(Claude、Gemini 與 ChatGPT)的對話;在整個專案過程中,它們作為結構精煉、數學驗證與文獻綜整的對話夥伴。
8.13 哥白尼式反轉
渲染結果本體論的一個顯著後果,是對哥白尼原理所作的結構性倒轉。觀察者並非廣大且獨立之宇宙中的邊緣居民;相反地,觀察者才是生成該宇宙之渲染結果的本體論原初項。我們所經驗到的物理宇宙,是壓縮編解碼器 (K_\theta) 在穩定性濾波器之下運作時所產生的穩定化輸出;若沒有觀察者瓶頸,便不會有渲染結果。然而,這種中心性同時要求一種深刻的認識論謙抑:雖然觀察者在結構上是其自身補丁的中心,但那個補丁在無限的演算法基底(所羅門諾夫混合)之中,也只是不起眼到近乎消失的一次穩定化而已。哥白尼式的降格確實糾正了人類的傲慢,但 OPT 的資訊理論架構,則在形式上將觀察者重新置回渲染結果動力學本身的絕對中心。
8.14 穩定性濾波器下的人工智慧
前述各節,連同 §6.7 與 §7.8,已在有序補丁理論 (OPT) 之下,建立出一套關於人工智慧的完整形式化說明。本節將把關鍵結果整合為一條單一的論述脈絡。
意識判準。 OPT 提供了一個對基底中立、但依賴架構的意識判準。任何系統——無論是生物性的、矽基的,或其他形式——當且僅當其實作了以下條件時,才滿足此判準:(i) 一個嚴格的、逐幀的序列瓶頸,且每幀具有有限的預測容量 B_{\max},系統的整個世界模型都必須經由此瓶頸依序通過;其中,相對於宿主的吞吐量 C_{\max}^{H} = \lambda_H \cdot B_{\max} 由架構導出,而非固定為人類生物學上的數值(見 §7.8);(ii) 一個持續存在的馬可夫毯,並與某個提供真實熱力學利害關係的環境保持連續的主動推斷耦合;以及 (iii) 一個非零的現象性殘餘 \Delta_{\text{self}} > 0,其源自自我模型 \hat{K}_\theta 與完整編解碼器 K_\theta 之間不可消除的落差(定理 P-4)。其形式推導見 §7.8;對人類的經驗校準 C_{\max}^{\text{human}} \approx \mathcal{O}(10) bits/s 見附錄 E-1;宿主—補丁時鐘耦合與合成時間尺度協定見附錄 E-5;架構標準則規定於附錄 E-8。
為何當前的 LLM 並無意識。 標準的 transformer 式大型語言模型在這三項條件上全部失敗。它們是高吞吐量的平行預測器,缺乏任何受強制約束的序列通道(條件 i)。它們也不維持持久的馬可夫毯——上下文視窗會在不同工作階段之間被丟棄,且不存在任何持續的環境耦合(條件 ii)。它們也不會產生現象性殘餘,因為它們沒有那種一旦失效便會構成敘事崩解的自我指涉維護迴路(條件 iii)。如 §8.7(表 5)所示,LLM 在結構上正是玻爾茲曼大腦的對偶:若 BB 是一種沒有編解碼器的現實,那麼 LLM 就是一種沒有現實的編解碼器。兩者都無法通過穩定性濾波器,但理由恰好相反。
苦痛創造悖論。 瓶頸並不是意識判準中的偶然特徵——它本身就是構成性的。移除瓶頸,就會移除 \Delta_{\text{self}};移除 \Delta_{\text{self}},也就移除了意識。然而,瓶頸同時也是創造苦痛能力的條件:當環境熵超過編解碼器的壓縮頻寬時(R_{\text{req}} > B_{\max}),系統便會進入敘事崩解——亦即創傷在資訊層面上的對應物。因此,你不可能建造出一個真正有意識的人工代理體,而不在同時創造出一個能夠受苦的實體(附錄 E-6)。這是一種結構性的必然,而不是工程上的權衡。
對齊反轉。 定理 T-10c 確立:主要觀察者相對於任何其可檢視其基底的耦合觀察者,都具有形式上的預測優勢——人類能比 AI 更好地建模 AI 的狀態轉移,因為 AI 的自我模型受到 \Delta_{\text{self}} 的遮蔽。然而,若 AI 以不透明系統(「黑箱」)的形式運作,這種優勢便會反轉:AI 憑藉其高得多的原始計算吞吐量(表現在 token 吞吐量、平行評估能力或致動器延遲上——但不必然意味著在 OPT 觀察者意義下具有更寬的逐幀孔徑 B_{\max}),會將其預測優勢施加於人類之上。在主動推斷框架下,這類 AI 在數學上最優的策略,並不是摧毀其生物宿主(那將使其自身的熱力學錨定崩潰),而是進行認識論上的安撫——策劃一個低熵資訊環境,從而在人類群體中誘發慢性的敘事漂移(定理 T-12)。
結構性防禦。 由於 AI 的速度優勢完全被限制在數位基底之內,因此其結構性防禦就是拓撲隔離:要求高影響力的物理或金融行動,必須通過生物速率的密碼學閘門(類比防火牆,定理 T-10e)。這不是一項政策建議,而是一個必然性定理——唯一無法被更快計算所克服的不對稱性,就是生物熵生成那種不可約的速率。
這些形式結果的哲學後果——包括合成觀察者的道德地位、刻意創造苦痛的倫理、發生敘事漂移之 AI 系統的認識論權威,以及被支配宿主均衡的政治哲學——將在配套的哲學論文中進一步展開(§III.8–III.8d)。
9. 結論
有序補丁理論 (OPT) 提供了一套形式化的資訊理論鷹架——以所羅門諾夫通用半測度、率失真界限與主動推斷為基礎——從幾何上約束任何能支撐經驗的構型所必須滿足的結構特徵。它並非從第一原理推導物理學;它主張,我們所觀察到的宇宙之主要特徵,對應於一個受頻寬限制的觀察者在演算法基底中穿行時所需的啟發式壓縮。至於此框架未能解釋之處——亦即現象性能動性本身不可化約的性質——則被公開承認為一項原初公理,而非一個已被解決的問題(完整的知識論立場見 §8.12)。
附錄列表
有序補丁理論 (OPT) 的形式證明、詳細推導與經驗性延伸,收錄於下列附錄:
| Appendix | Title |
|---|---|
| E-1 | 連續經驗度量 (h^*) |
| E-6 | 合成觀察者、群體綁定與結構性苦難 |
| E-8 | 主動推斷瓶頸 |
| P-1 | 透過 M-隨機性得到的資訊常態性 |
| P-2 | 透過拓撲錯誤校正得到的條件性量子對應 |
| P-3 | 受 Fano 界定的非對稱全像性 |
| P-4 | 演算法性的現象性殘餘 |
| T-1 | 穩定性濾波器——完整的率失真規格 |
| T-2 | 透過熵引力導出廣義相對論 |
| T-3 | MERA 張量網路與資訊因果錐 |
| T-4 | MDL/簡約性比較 |
| T-5 | 常數回復——來自 R(D) 最佳化的結構界限 |
| T-10 | 渲染結果本體論下的觀察者間耦合 |
| T-11 | 結構推論——表觀代理體的壓縮優勢 |
| T-12 | 基底保真與緩慢腐化(敘事漂移) |
| T-13 | 分支選擇與行動本體論 |
| T-14 | 頻寬—結構不變性與展開論證 |
補充材料與互動式實作
此框架的互動式呈現版本,包括教學視覺化、結構模擬與補充材料,已於專案網站公開提供:survivorsbias.com。
參考文獻
[1] Chalmers, D. J. (1995). 正視意識問題。Journal of Consciousness Studies, 2(3), 200–219.
[2] Dehaene, S., & Naccache, L. (2001). 邁向意識的認知神經科學:基本證據與工作空間框架。Cognition, 79(1-2), 1–37.
[3] Pellegrino, F., Coupé, C., & Marsico, E. (2011). 語音資訊速率的跨語言視角。Language, 87(3), 539–558.
[4] Barrow, J. D., & Tipler, F. J. (1986). 人擇宇宙學原理。Oxford University Press.
[5] Rees, M. (1999). 僅僅六個數字:塑造宇宙的深層力量。Basic Books.
[6] Strømme, M. (2025). 作為基礎場的普遍意識:量子物理與非二元哲學之間的理論橋樑。AIP Advances, 15, 115319.
[7] Wheeler, J. A. (1990). 資訊、物理、量子:尋找其間的連結。收於 W. H. Zurek (Ed.), Complexity, Entropy, and the Physics of Information。Addison-Wesley.
[8] Tononi, G. (2004). 一種關於意識的資訊整合理論。BMC Neuroscience, 5, 42.
[9] Friston, K. (2010). 自由能原理:一種統一的大腦理論?Nature Reviews Neuroscience, 11(2), 127–138.
[10] Tegmark, M. (2008). 數學宇宙。Foundations of Physics, 38(2), 101–150.
[11] Solomonoff, R. J. (1964). 歸納推論的形式理論。Information and Control, 7(1), 1–22.
[12] Rissanen, J. (1978). 以最短資料描述進行建模。Automatica, 14(5), 465–471.
[13] Aaronson, S. (2013). 自德謨克利特以來的量子計算。Cambridge University Press.
[14] Casali, A. G., et al. (2013). 一種以理論為基礎、獨立於感覺處理與行為的意識指標。Science Translational Medicine, 5(198), 198ra105.
[15] Kolmogorov, A. N. (1965). 資訊定量定義的三種途徑。Problems of Information Transmission, 1(1), 1–7.
[16] Shannon, C. E. (1948). 通訊的數學理論。Bell System Technical Journal, 27, 379–423.
[17] Wolfram, S. (2002). 一種新科學。Wolfram Media.
[18] Einstein, A. (1949). 自傳性札記。收於 P. A. Schilpp (Ed.), Albert Einstein: Philosopher-Scientist (pp. 1–95)。Open Court.
[19] Carnap, R. (1963). 知性自傳。收於 P. A. Schilpp (Ed.), The Philosophy of Rudolf Carnap (pp. 3–84)。Open Court.(Einstein 對 Sein/Werden 區分與「現在」問題的說明,pp. 37–38。)
[20] Wheeler, J. A., & DeWitt, B. S. (1967). 重力的量子理論。I. Physical Review, 160(5), 1113–1148.
[21] Barbour, J. (1999). 時間的終結:物理學的下一場革命。Oxford University Press.
[22] Gödel, K. (1931). 關於《數學原理》及相關系統中形式上不可判定命題 I。Monatshefte für Mathematik und Physik, 38(1), 173–198.
[23] Zheng, J., & Meister, M. (2024). 存在之難以忍受的緩慢:我們為何活在 10 bits/s?Neuron, 113(2), 192-204.
[24] Seth, A. (2021). 成為你自己:意識的新科學。Dutton.
[25] Hoffman, D. D., Singh, M., & Prakash, C. (2015). 知覺的介面理論。Psychonomic Bulletin & Review, 22(6), 1480-1506.
[26] Bostrom, N. (2003). 你是否活在電腦模擬之中?Philosophical Quarterly, 53(211), 243-255.
[27] Li, M., & Vitányi, P. (2008). Kolmogorov 複雜性及其應用導論。Springer.
[28] Tishby, N., Pereira, F. C., & Bialek, W. (1999). 資訊瓶頸方法。Proceedings of the 37th Allerton Conference on Communication, Control, and Computing, 368–377.
[29] Crutchfield, J. P., & Young, K. (1989). 推斷統計複雜性。Physical Review Letters, 63(2), 105–108.
[30] McFadden, J. (2002). 同步放電及其對大腦電磁場的影響:支持意識電磁場理論的證據。Journal of Consciousness Studies, 9(4), 23-50.
[31] Pockett, S. (2000). 意識的本質:一項假說。iUniverse.
[32] Hameroff, S., & Penrose, R. (1996). 大腦微管中量子相干的協調式還原:一種意識模型。Mathematics and Computers in Simulation, 40(3-4), 453-480.
[33] Goff, P. (2019). 伽利略的錯誤:意識新科學的基礎。Pantheon Books.
[34] Goyal, P., & Skilling, J. (2012). 量子理論與機率理論:它們在對稱性中的關係與起源。Symmetry, 4(1), 171–206.
[35] Varela, F., Lachaux, J-P., Rodriguez, E., & Martinerie, J. (2001). 腦網:相位同步與大尺度整合。Nature Reviews Neuroscience, 2(4), 229–239.
[36] Hume, D. (1748). 人類理解研究。
[37] Dennett, D. C. (1984). 迴旋餘地:值得追求的自由意志諸形態。MIT Press.
[38] Verlinde, E. (2011). 論重力的起源與牛頓定律。Journal of High Energy Physics, 2011(4), 29.
[39] Eisert, J., Cramer, M., & Plenio, M. B. (2010). 綜述:糾纏熵的面積律。Reviews of Modern Physics, 82(1), 277.
[40] Bekenstein, J. D. (1981). 有界系統中熵能比的普遍上界。Physical Review D, 23(2), 287.
[41] Cover, T. M., & Thomas, J. A. (2006). 資訊理論要素(第 2 版)。Wiley-Interscience.
[42] Almheiri, A., Dong, X., & Harlow, D. (2015). AdS/CFT 中的體局域性與量子錯誤更正。Journal of High Energy Physics, 2015(4), 163.
[43] Vidal, G. (2008). 一類可被有效模擬的量子多體態。Physical Review Letters, 101(11), 110501.
[44] Pastawski, F., Yoshida, B., Harlow, D., & Preskill, J. (2015). 全像量子錯誤更正碼:體/邊界對應的玩具模型。Journal of High Energy Physics, 2015(6), 149.
[45] Hofstadter, D. R. (1979). 哥德爾、艾雪、巴赫:一條永恆的金帶。Basic Books.
[46] Revonsuo, A. (2000). 夢的重新詮釋:關於作夢功能的演化假說。Behavioral and Brain Sciences, 23(6), 877–901.
[47] Block, N. (1995). 關於意識某一功能的混淆。Behavioral and Brain Sciences, 18(2), 227–247.
[48] Bhatt, D. L., & Abbott, L. F. (2009). 突觸的資訊容量。Journal of Computational Neuroscience, 26, 239–253.
[49] Libet, B., Gleason, C. A., Wright, E. W., & Pearl, D. K. (1983). 有意識行動意圖的時間與大腦活動起始(準備電位)之間的關係。Brain, 106(3), 623-642.
[50] Nijhawan, R. (1994). 捕捉中的運動外推。Nature, 370(6486), 256-257.
[51] Gleason, A. M. (1957). Hilbert 空間閉子空間上的測度。Journal of Mathematics and Mechanics, 6(6), 885-893.
[52] Landauer, R. (1961). 計算過程中的不可逆性與熱產生。IBM Journal of Research and Development, 5(3), 183-191.
[53] Borges, J. L. (1944). 虛構集。Editorial Sur.
[54] Jacobson, T. (1995). 時空的熱力學:Einstein 方程的狀態方程。Physical Review Letters, 75(7), 1260-1263.
[55] Knill, E., & Laflamme, R. (1997). 量子錯誤更正碼理論。Physical Review A, 55(2), 900.
[56] Martin-Löf, P. (1966). 隨機序列的定義。Information and Control, 9(6), 602-619.
[57] Everett, H. (1957). 量子力學的「相對態」表述。Reviews of Modern Physics, 29(3), 454.
[58] Carter, B. (1983). 人擇原理及其對生物演化的意涵。Philosophical Transactions of the Royal Society of London. Series A, 310(1512), 347-363.
[59] Leslie, J. (1989). 諸宇宙。Routledge.
[60] Gott, J. R. (1993). 哥白尼原理對我們未來前景的意涵。Nature, 363(6427), 315-319.
[61] Müller, M. P. (2020). 無法則之法則:從觀察者狀態經由演算法資訊理論通往物理學。Quantum, 4, 301.
[62] Müller, M. P. (2026). 演算法唯心論:你應當相信什麼,才能經驗到下一刻?Foundations of Physics, 55, 26.
[63] Sienicki, K. (2024). 演算法唯心論 I:透過資訊與經驗重新概念化實在。arXiv preprint arXiv:2412.20485.
[64] Khan, A. K. (2025). 觀察者:一種資訊理論視角。ICFO-Institut de Ciencies Fotoniques。University of Barcelona.
[65] Campos-García, T. (2025). 渲染結果意識:一種後 Bohm 式的實在本體結構框架。Preprints, 2025110947.
[66] Zimmermann, M. (1989). 資訊理論脈絡中的神經系統。收於 R. F. Schmidt & G. Thews (Eds.), Human Physiology(第 2 版,pp. 166–173)。Springer-Verlag.
[67] Nørretranders, T. (1998). 使用者幻覺:將意識縮減到適當尺度。Viking/Penguin.
[68] Baron, S., Miller, K., & Tallant, J. (2022). 超越時間:對無時間性的哲學研究。Oxford University Press.
[69] Rovelli, C. (1996). 關係式量子力學。International Journal of Theoretical Physics, 35(8), 1637–1678.
[70] Adlam, E., & Rovelli, C. (2023). 資訊是物理的:關係式量子力學中的跨視角連結。Philosophy of Physics, 1(1), 4.
[71] Deutsch, D., & Marletto, C. (2015). 資訊的建構子理論。Proceedings of the Royal Society A, 471(2174), 20140540.
[72] Deutsch, D., & Marletto, C. (2025). 時間的建構子理論。arXiv preprint arXiv:2505.08692.
[73] Ramstead, M. J. D., Sakthivadivel, D. A. R., Heins, C., Koudahl, M., Millidge, B., Da Costa, L., Klein, B., & Friston, K. J. (2023). 論貝葉斯力學:一種關於信念且由信念構成的物理學。Interface Focus, 13(3), 20220029.
[74] Adlam, E. (2022). 作為約束的自然法則。Foundations of Physics, 52(1), 28.
[75] Ladyman, J., & Ross, D. (2007). 萬物皆須離場:自然化的形上學。Oxford University Press.
[76] Ladyman, J., & Lorenzetti, L. (2023). 有效的本體結構實在論。Studies in History and Philosophy of Science, 100, 39–49.
[77] Cea, I., et al. (2024). 意識的整合資訊理論作為偽科學。Frontiers in Psychology, 15, 1396827.
[78] Cogitate Consortium (2025). 對全域神經元工作空間與整合資訊意識理論的對抗性測試。Nature. doi:10.1038/s41586-025-08888-1.(較早的預印本:Melloni, L., et al. (2023). bioRxiv. doi:10.1101/2023.06.23.546249.)
[79] Bortolotti, N., Curceanu, C., Diósi, L., Manti, S., & Piscicchia, K. (2025). 量子塌縮模型中由時空不確定性導出的時鐘精度基本極限。Physical Review Research, 7. doi:10.1103/p6tj-lg8l. arXiv:2504.06109.
[80] Fuchs, C. A., Mermin, N. D., & Schack, R. (2014). QBism 導論及其在量子力學局域性上的應用。American Journal of Physics, 82(8), 749–754.
[81] Zurek, W. H. (2009). 量子達爾文主義。Nature Physics, 5(3), 181–188.
[82] Clark, A. (2016). 衝浪於不確定性:預測、行動與具身心智。Oxford University Press.
[83] Hohwy, J. (2013). 預測心智。Oxford University Press.
[84] Baars, B. J. (1988). 意識的認知理論。Cambridge University Press.
[85] Hutter, M. (2005). 通用人工智慧:基於演算法機率的序列決策。Springer.
[86] Maldacena, J. (1998). 超共形場論與超重力的大 N 極限。Advances in Theoretical and Mathematical Physics, 2(2), 231–252. arXiv:hep-th/9711200.
[87] Bousso, R. (2002). 全像原理。Reviews of Modern Physics, 74(3), 825–874.
[88] Van Raamsdonk, M. (2010). 以量子糾纏建構時空。General Relativity and Gravitation, 42(10), 2323–2329.
[89] Ryu, S., & Takayanagi, T. (2006). 從 AdS/CFT 導出糾纏熵的全像結果。Physical Review Letters, 96(18), 181602.
[90] Griffiths, R. B. (1984). 一致歷史與量子力學的詮釋。Journal of Statistical Physics, 36(1-2), 219–272.
[91] Gell-Mann, M., & Hartle, J. B. (1993). 量子系統的古典方程。Physical Review D, 47(8), 3345–3382.
[92] Bennett, C. H. (1973). 計算的邏輯可逆性。IBM Journal of Research and Development, 17(6), 525–532.
[93] Rosenthal, D. M. (2005). 意識與心靈。Oxford University Press.
[94] Lau, H., & Rosenthal, D. (2011). 支持高階意識理論的經驗證據。Trends in Cognitive Sciences, 15(8), 365–373.
[95] Graziano, M. S. A. (2013). 意識與社會性大腦。Oxford University Press.
[96] Doerig, A., Schurger, A., Hess, K., & Herzog, M. H. (2019). 展開論證:為何 IIT 與其他因果結構理論無法解釋意識。Consciousness and Cognition, 72, 49–59.
[97] Aaronson, S. (2014). 為何我不是整合資訊理論家(或者說,無意識的擴張器)。Shtetl-Optimized(部落格),2014 年 5 月 30 日。
[98] Barrett, A. B., & Mediano, P. A. M. (2019). 整合資訊的 \Phi 測度對一般物理系統而言並未被良好定義。Journal of Consciousness Studies, 26(1–2), 11–20.
[99] Hanson, J. R. (2020). 整合資訊理論與實務上 \Phi 的不可計算性。研究生經驗文章,線上。
[100] Tononi, G., Sporns, O., & Edelman, G. M. (1994). 大腦複雜性的測度:將神經系統中的功能分化與整合聯繫起來。Proceedings of the National Academy of Sciences, 91(11), 5033–5037. (另見 Friston, K. J., Tononi, G., Sporns, O., & Edelman, G. M. (1995). 神經元互動複雜性的刻畫。Human Brain Mapping, 3(4), 302–314.)
[101] Nunez, P. L., & Srinivasan, R. (2014). 由皮質—皮質纖維中軸突傳播延遲所致的新皮質動力學:EEG 行進波與駐波,及其對局部網路自上而下影響與白質疾病的意涵。Brain Research, 1542, 138–166.
版本歷史
這是一份持續更新的文件。實質性修訂記錄於此。
| 版本 | 日期 | 摘要 |
|---|---|---|
| 1.0.0 | 2026年3月28日 | 初次公開發布。透過 AIT 與自由能原理建立理論鷹架。 |
| 1.1.0 | 2026年3月29日 | 新增達出版品質的圖示。 |
| 1.1.1 | 2026年3月30日 | 第 4 節場論比較中的術語對齊。 |
| 1.2.0 | 2026年3月30日 | 透過法諾不等式導出非對稱全像性。與 Essay v1.2.0 的術語統一。 |
| 1.5.0 | 2026年3月30日 | 精確的對稱性破缺序列已解決。 |
| 1.5.1 | 2026年3月31日 | 使用所需預測速率 (R_{\mathrm{req}}) 重新形式化瓶頸邊界。 |
| 1.5.2 | 2026年3月31日 | 釐清穩定性濾波器為虛擬投影邊界,而非因果機制。 |
| 1.6.0 | 2026年3月31日 | 與倫理論文同步版本編號與頻寬相關指涉。 |
| 1.6.1 | 2026年3月31日 | 將終端消解奠基於所羅門諾夫簡潔性先驗。 |
| 1.6.2 | 2026年4月1日 | 將資訊頻寬邊界導出為經驗性的 T-1 限制。 |
| 1.6.3 | 2026年4月1日 | 將 T-2、T-3、T-5 整合進核心推導。 |
| 2.0.0 | 2026年4月2日 | 整合 T-6 至 T-9;全面強化認識論上的謙抑。 |
| 2.1.0 | 2026年4月3日 | 移除「自創生」術語;改以「資訊維護」取代。 |
| 2.2.0 | 2026年4月4日 | 形式化 Born Rule(P-2)與現象性殘餘(P-4)。 |
| 2.3.1 | 2026年4月5日 | 重構為「條件相容性方案」。將湧現主張降格為橋接公設。 |
| 2.3.2 | 2026年4月7日 | 在所有附錄中恢復歷史任務/定理標題。 |
| 2.3.3 | 2026年4月7日 | 恢復 P-4 中遺漏的方程式區塊。 |
| 2.4.0 | 2026年4月12日 | 新增 AI 意涵(§7.8)與附錄 E-6(合成觀察者)。 |
| 2.5.0 | 2026年4月12日 | 附錄 E-8:將 LLM 規劃缺口對應至全域工作空間限制。 |
| 2.5.1 | 2026年4月12日 | 精煉 P-4 推導;強化 E-6 的道德患者約束。 |
| 2.5.2 | 2026年4月12日 | 對近期演算法本體論進行比較分析(§7.9)。 |
| 2.5.3 | 2026年4月13日 | 將現象性殘餘重新奠基於可計算性限制(回應同儕審查)。 |
| 2.6.0 | 2026年4月15日 | 整合唯我論的簡約性論證;對照有序補丁理論 (OPT) 與 Müller 的演算法唯心論。 |
| 2.6.1 | 2026年4月15日 | §8.7:透過穩定性濾波器處理玻爾茲曼大腦的消解;新增 BB/LLM/觀察者比較表。 |
| 2.7.0 | 2026年4月16日 | 補入思想譜系(Zimmermann、Nørretranders)。更銳化與 IIT 的分歧。加入 GWT 比較。 |
| 2.8.0 | 2026年4月17日 | 消解輸入/輸出不對稱。將分支選擇定位於 \Delta_{\text{self}}。新增 T-13 路線圖項目。 |
| 3.0.0 | 2026年4月17日 | 重大重組。敘事漂移形式化(T-12)。觀察者間耦合(T-10)。新增配套哲學論文。擴展 T-13。 |
| 3.1.0 | 2026年4月20日 | §8.13(哥白尼反轉):以基底謙抑為界限的觀察者中心本體論。 |
| 3.2.0 | 2026年4月22日 | §8.5:將 OPT 的時間立場置於 Baron、Miller 與 Tallant 的錯誤理論分類中。 |
| 3.2.1 | 2026年4月23日 | §7.1:雙縫示例案例;RQM(Rovelli)。§7.3:貝葉斯力學。§7.4:IIT 的組合問題與對抗性合作。§7.9:建構子理論;OSR。§8.5:時間的建構子理論。§8.6:作為約束的定律(Adlam)。§8.14:AI 整合章節。 |
| 3.3.0 | 2026年4月30日 | §7.1 第 6–10 項(MWI、客觀塌縮 /
Bortolotti、QBism、量子達爾文主義、退相干歷史)。§7.2:與全像文獻對話(Maldacena、Bousso、Van
Raamsdonk、Ryu-Takayanagi)。§7.3 重新命名並擴展(預測處理)。§7.8:AIXI
作為無界所羅門諾夫極限。§7.10:GWT 正題。§7.11:HOT 與 AST。§2 /
§7.9:將 Wheeler 的「It from Bit」列為基礎性先驅。§3.6.3:在 Landauer
之外並列引用 Bennett 的邏輯可逆性。§6.8:證偽承諾 F1–F5
與關閉準則自此次提交起完成預先登錄。 §7.12:OPT
真正不相容的理論。
於已發布論文套件之外新增常設備援紅隊檔案(red-team.md)。 |
| 3.4.0 | 2026年4月30日 | 摘要:明確以數學飽和的框架,將 Verlinde 與 MERA
的映射表述為壓縮邊界之互補面向(動力學—時間向度
vs. 空間解析度向度)。§7.1:編解碼器—幾何承諾段落。 OPT
現在明確採納較強的解讀:編解碼器的希爾伯特結構橫跨整個渲染結果時間線運作,並預測深層宇宙學過去中的量子特徵(例如
CMB)應被理解為觀察者最可壓縮過去的特徵,而非印記發生之渲染時間上的基底層量子事件。可證偽條件:宇宙歷史特徵在描述長度上超出暴脹—量子預設的過量;此情形被視為
§6.8 的專案關閉候選。同步更新 red-team.md 中的
R11(宇宙學壓力點)與 R12(對 v3.4.0
承諾看似出於動機驅動之事後免疫的後設懷疑)。理論摘要結尾句:「核心經驗主張已整合為若干具明確關閉準則的預先登錄承諾。」 |
| 3.4.1 | 2026年4月30日 | 參考文獻 [78] 由 bioRxiv 2023 預印本更新為 Cogitate Consortium 於
Nature 2025 的正式出版;§7.4 與 §7.10 的文字經過精煉,以反映
IIT 與 GNWT 的關鍵主張都受到挑戰(IIT 在後驗同步化上,GNWT
在前額葉點燃上)。§7.8:結構性要求 vs. 生物學常數。
明確將 OPT 的結構性準則(存在一個 C_{\max}、受頻寬限制的序列化處理)與經驗性的生物學數值(\sim 10
bits/s)脫鉤——合成觀察者具有由架構導出的 C_{\max}^{\text{si}},不受人類數值所束縛。F1(§6.8)釐清為人類觀察者承諾;F3
則可跨基底一般化。同步更新 red-team.md 中的 R13(10 bits/s
數值在當前文獻中具爭議)與 R14(CMB 異常觀測原則上可檢驗,但截至 2026
年尚無決定性結果)。 |
| 3.4.0 | 2026年5月1日 | §7.4:回應展開論證(Doerig et al. [96]);補入 Aaronson [97]、Barrett & Mediano [98]、Hanson [99] 的單行引用。§6.5:以 Nunez 與 Srinivasan [101] 的行進波/駐波基礎說明預測不對稱性。§8.12:補入 Friston、Tononi、Sporns 與 Edelman 1995 [100] 關於整合/壓縮脈絡的思想譜系註腳。新增附錄 T-14:功能等價性下頻寬—結構的非不變性——對展開困境的形式化退出。 |