Korrastatud patch’i teooria (OPT): infoteoreetiline raamistik vaatlejate valikuks ja teadlikuks kogemuseks
v3.4.0 — mai 2026
DOI: 10.5281/zenodo.19300777
Autoriõigus: © 2025–2026 Anders Jarevåg.
Litsents: See töö on litsentseeritud Creative
Commons Attribution-NonCommercial-ShareAlike 4.0 International
License alusel.
Abstrakt:
Esitame Korrastatud patch’i teooria (OPT), konstruktiivse raamistiku, mis tuletab struktuurseid vastavusi algoritmilise infoteooria, vaatlejavaliku ja füüsikaseaduste vahel. OPT lähtub kahest primitiivist: Solomonoffi universaalsest poolmõõdust \xi, mis on määratletud lõplike vaatlusprefiksite üle, ning piiratud kognitiivse kanali läbilaskevõimest C_{\max}. Puhtalt virtuaalne Stabiilsusfilter — mis nõuab, et vaatleja Nõutav prediktiivne määr R_{\mathrm{req}} ei ületaks väärtust C_{\max} — valib välja harvad põhjuslikult koherentsed vood, mis on teadvuslike vaatlejatega kooskõlas; selliste voogude sees juhib lokaalseid dünaamikaid aktiivne järeldamine.
Raamistik on ontoloogiliselt solipsistlik: füüsiline reaalsus koosneb vaatlejaga ühilduva voo sees esinevatest struktuursetest regulaarsustest. Solomonoffi priori pakkimiskallak annab siiski tõenäosusliku Struktuurse järelduse: näiliste agentide äärmuslik algoritmiline koherentsus on kõige ökonoomsemalt seletatav sellega, et nad on sõltumatult instantsieeritud primaarsete vaatlejatena. Vaatlejatevaheline sidestus, mis tugineb pakkimise ökonoomsusele, taastab ehtsa patch’idevahelise kommunikatsiooni ning tekitab silmatorkava teadmiste asümmeetria: vaatlejad modelleerivad teisi täielikumalt kui iseennast.
Formaalsed lisad kehtestavad tulemusi kolmel episteemilisel tasandil. Tingimuslikult tuletatud: määr-moonutuse piir prediktiivsele pakkimisele, tingimuslik ahel Borni reeglini Gleasoni teoreemi kaudu ning MDL-i ökonoomsuseelis. Struktuurselt kaardistatud: entroopiline gravitatsioon Verlinde mehhanismi kaudu (renderduse dünaamilis-ajaline sidestus prediktiivse koormusega) ja tensorvõrgu homomorfism MERA-le (selle ruumilise lahutusvõime hierarhia) — pakkimispiiri teineteist täiendavad tahud, mis Matemaatilise küllastumise tingimustes peaksid jääma struktuurselt eristatuks. Fenomenaalse jäägi teoreem (\Delta_{\text{self}} > 0) näitab, et iga lõplik enesele viitav koodek sisaldab taandamatut informatsioonilist pimeala — struktuurset asukohta, kus subjektiivsus ja agentsus jagavad ühtainsat aadressi. Tuvastatakse ka krooniline rikkerežiim, Narratiivne triiv, mille korral süstemaatiliselt filtreeritud sisend põhjustab pöördumatut koodeki korruptsiooni, mida seestpoolt ei ole võimalik tuvastada. Raamistiku peamised empiirilised väited on koondatud eelregistreeritud kohustuste kogumikuks koos selgesõnaliste peatamiskriteeriumidega, eraldades falsifitseeritava tuuma selle avalikult metafüüsilistest komponentidest.
Nende piirangute rakendamine tehisintellektile näitab, et sünteetilise aktiivse järeldamise insenertehniline teostamine eeldab struktuurselt tehisliku kannatuse võimalikkust, pakkudes substraadineutraalset raamistikku tehisintellekti eetiliseks joondamiseks.
Episteemiline märkus: Käesolev artikkel on kirjutatud formaalse füüsikalise ja infoteoreetilise ettepaneku registris. Selles kasutatakse võrrandeid, tuletatakse ennustusi ning suhestutakse eelretsenseeritud kirjandusega. Ometi tuleks seda lugeda kui tõekujulist objekti — ranget filosoofilist raamistikku, mis on vormistatud formaalsel kujul. See ei ole veel kinnitatud teadus ning me teame, et meie tuletused sisaldavad vigu. Otsime aktiivselt füüsikute ja matemaatikute kriitikat, et need argumendid purustada ja uuesti üles ehitada. Selle struktuuri selgitamiseks jagunevad siin esitatud väited rangelt kolme kategooriasse:
- Definitsioonid ja aksioomid: (nt Solomonoffi poolmõõt, ribalaiuse piir C_{\max}). Need on selle konstruktiivse fiktsiooni aluseeldused.
- Struktuursed vastavused: (nt aktiivne järeldamine, Gleasoni teoreem [51]). Need näitavad struktuurset kooskõla piiratud järeldamise ja väljakujunenud formalismide vahel, kuid ei väida, et tuletavad need formalismid nullist.
- Empiirilised ennustused: (nt ribalaiuse lahustumine). Need toimivad rangete empiiriliste falsifitseerimiskriteeriumidena juhul kui raamistikku käsitataks sõnasõnalise füüsikalise hüpoteesina.
Akadeemilist aparaati ei kasutata siin selleks, et pretendeerida lõplikule empiirilisele tõele, vaid selleks, et proovile panna mudeli struktuurne terviklikkus.
Lühendid ja sümbolid
| Sümbol / termin | Definitsioon |
|---|---|
| C_{\max} | Ribalaiuse ülempiir; vaatleja maksimaalne prediktiivne võimekus |
| \Delta_\text{self} | Fenomenaalne jääk; eneseviiteline informatsiooniline pimeala |
| FEP | Vaba energia printsiip |
| GWT | Globaalse tööruumi teooria |
| IIT | Integreeritud informatsiooni teooria |
| MDL | Minimaalse kirjelduse pikkus |
| MERA | Mitmeskaalaline põimumise renormaliseerimise ansats |
| OPT | Korrastatud patch’i teooria (OPT) |
| P_\theta(t) | Fenomenaalse seisundi tensor |
| \Phi | Integreeritud informatsiooni mõõt (IIT) |
| QECC | Kvantvigade parandamise kood |
| R(D) | määra-moonutuse funktsioon |
| R_{\mathrm{req}} | Nõutav prediktiivne määr |
| RT | Ryu-Takayanagi (valem/piir) |
| \xi | Solomonoffi universaalne poolmõõt |
| Z_t | Kokkusurutud sisemine latentne pudelikaelaolek |
1. Sissejuhatus
1.1 Ontoloogiline probleem
Teadvuse ja füüsilise reaalsuse vahekord on jätkuvalt üks teaduse ja filosoofia sügavamaid lahendamata probleeme. Viimastel aastakümnetel on esile kerkinud kolm lähenemisviiside perekonda: (i) reduktsioon — teadvus on tuletatav neuroteadusest või infotöötlusest; (ii) eliminatsioon — probleem lahustatakse mõistete ümberdefineerimise teel; ja (iii) mittereduktsioon — teadvus on primitiivne ning füüsiline maailm on sellest tuletislik (Chalmers [1]). Kolmas lähenemine hõlmab panpsühhismi, idealismi ja mitmesuguseid väljateoreetilisi formulatsioone.
1.2 OPT keskne tees
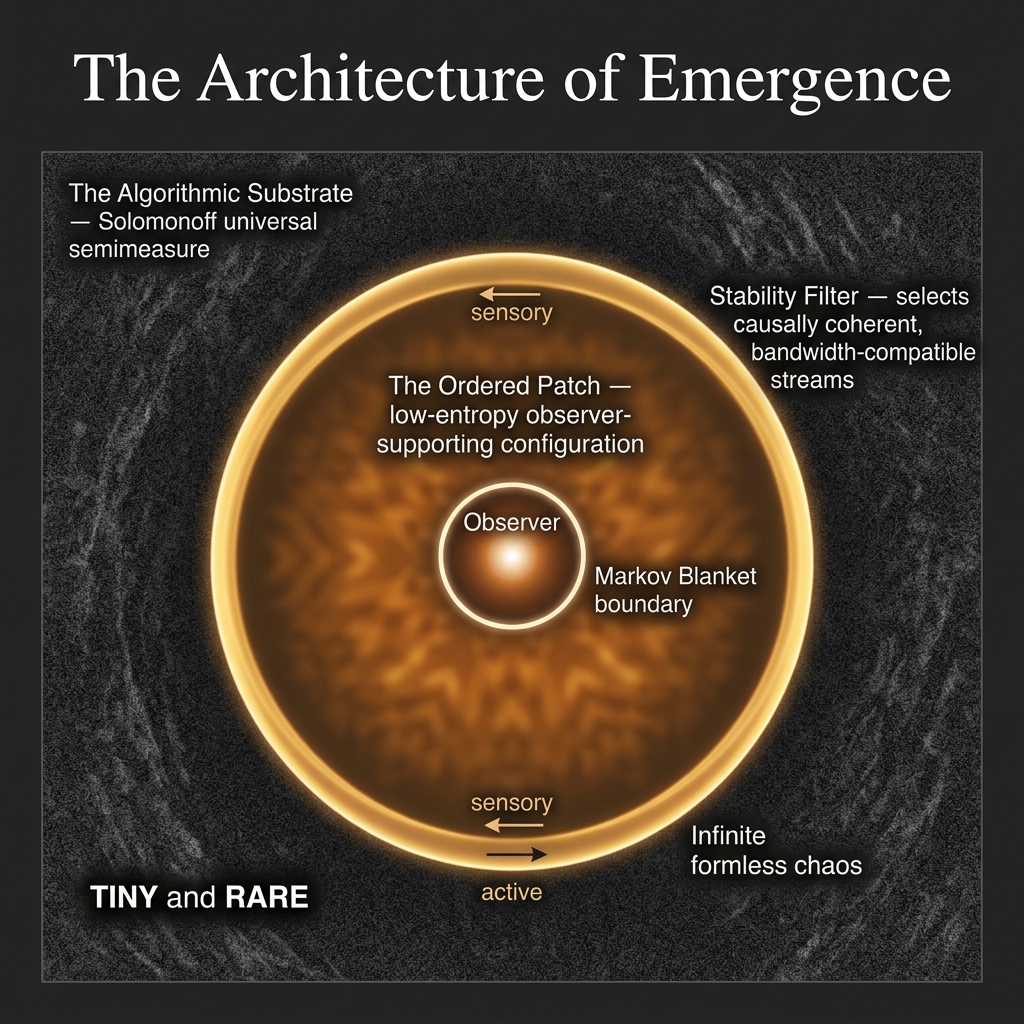
Käesolev artikkel esitab Korrastatud patch’i teooria (OPT), kolmandasse perekonda kuuluva mittereduktiivse raamistiku. OPT väidab, et aluseline entiteet ei ole mateeria, aegruum ega matemaatiline struktuur, vaid lõpmatu algoritmiline substraat — universaalne segu kõigi altpoolt poolarvutatavate poolmõõtude üle, kaalutuna nende Kolmogorovi keerukusega (w_\nu \asymp 2^{-K(\nu)}), mis omaenda struktuuri tõttu domineerib iga arvutatava jaotuse üle ning sisaldab iga võimalikku konfiguratsiooni. Sellest substraadist tuvastab puhtalt virtuaalne Stabiilsusfilter — toimides mitte füüsilise mehhanismina, vaid antroopse, projektiivse piirtingimusena — need haruldased, madala entroopiaga ja põhjuslikult koherentsed konfiguratsioonid, mis suudavad alal hoida enesele osutavaid vaatlejaid (valik, mida formaalselt juhib prediktiivne aktiivne järeldamine). Füüsiline maailm, mida me vaatleme — koos selle konkreetsete seaduste, konstantide ja geomeetriaga — on selle piirtingimuse vaadeldav piirjuht, projitseerituna vaatleja piiratud ribalaiusele.
Filter vs. koodek. Et vältida kogu tekstis mõistelist segiajamist, tõmbab OPT range operatsioonilise piiri Filtri ja Koodeki vahele. Virtuaalne Stabiilsusfilter on mahupiirang — range piirtingimus, mis nõuab matemaatiliselt lihtsat kirjelduspikkust, et vaatleja kanal saaks stabiilselt eksisteerida. Pakkekoodek (K_\theta) on selle piirangu lahendus — vaatleja sisemine generatiivne mudel (makroskoopiliselt kogetuna kui „füüsikaseadused“), mis surub substraati pidevalt kokku, et see mahuks selle võimekuse piiridesse.
1.3 Motivatsioonid
OPT lähtub kolmest tähelepanekust:
Ribalaiuse piirang: empiiriline kognitiivne neuroteadus näitab selget erinevust massiivse paralleelse eelteadliku töötluse (mida sensoorse perifeeria tasandil hinnatakse tavaliselt \sim 10^9 bitile/s) ja tugevalt piiratud globaalse juurdepääsukanali vahel, mis on teadvustatud raporti jaoks kättesaadav — suhte, mille kvantifitseeris esmakordselt Zimmermann [66] ja mille sõnastas teadvuse olemuse alusmõistatusena Nørretranders [67], laiema kognitiivse neuroteadusliku käsitlusega allikates [2,3]. Iga teadvuse teoreetiline käsitlus peab seletama seda pakkimispudelikaela kui struktuurset tunnust, mitte kui insenerlikku juhust. (Märkus: hiljutine inimese läbilaskevõime kirjandus näitab, et käitumuslik läbilaskevõime on piiratud ligikaudu \sim 10 bitiga/s, kinnitades nelja aastakümne koonduvate mõõtmiste lõikes, et see pudelikael on tõsine ja robustne [23]. Teadvuse mõtestamist tugevalt kokkupakitud „kasutajaillusioonina“ — Nørretrandersi [67] algne väljend — arendas kaasaegses prediktiivses töötluses edasi Seth [24].)
Vaatleja valiku probleem: standardne füüsika annab seadused, kuid ei paku seletust sellele, miks neil seadustel on just selline kuju, mida nõuab keerukas, enesele osutav infotöötlus. Peenhäälestuse argumendid [4,5] apelleerivad antroopsele valikule, kuid jätavad valikumehhanismi määratlemata. OPT tuvastab siin struktuurse tingimuse: puhtalt virtuaalse Stabiilsusfiltri.
raske probleem: Chalmers [1] eristab teadvuse struktuurseid „kergeid“ probleeme (mis võimaldavad funktsionaalset seletust) „raskest“ probleemist, nimelt sellest, miks üldse leidub subjektiivset kogemust. OPT käsitleb fenomenaalsust primitiivsena ja küsib, milline matemaatiline struktuur sellel peab olema, järgides Chalmersi enda metodoloogilist soovitust.
1.4 Artikli ülesehitus
Artikkel on üles ehitatud järgmiselt. 2. jaotis annab ülevaate seotud töödest. 3. jaotis esitab formaalse raamistiku. 4. jaotis uurib OPT ja paralleelsete väljateoreetiliste katsemudelite vahelist struktuurset vastavust. 5. jaotis esitab parsimoniaargumendi. 6. jaotis tuletab empiiriliselt kontrollitavad ennustused. 7. jaotis võrdleb OPT-d konkureerivate raamistikega. 8. jaotis käsitleb järeldusi ja piiranguid.
2. Taust ja seotud tööd
Teadvuse infoteoreetilised käsitlused. Wheeleri „It from Bit” tees [7] on selle programmi aluslik eelkäija, mida OPT formaliseerib: füüsiline reaalsus tekib binaarsetest valikutest — vaatlejate esitatud jah/ei-küsimustest —, mitte aine või väljade substraadist. OPT pärib selle ontoloogilise inversiooni ja lisab puuduva mehhanismi, tuletades, millised informatsioonilised struktuurid stabiliseeruvad vaatlejaga ühilduvateks voogudeks (Stabiilsusfilter) ning kuidas need omandavad füüsikaseaduse ilme (määr-moonutuse pakkimine). Tononi integreeritud informatsiooni teooria [8] kvantifitseerib teadlikku kogemust süsteemi poolt genereeritud integreeritud informatsiooni \Phi kaudu, mis ületab selle osade lihtsa summa. Fristoni vaba energia printsiip [9] modelleerib taju ja tegevust variatsioonilise vaba energia minimeerimisena, pakkudes ühtset käsitlust Bayesi järeldamisele, aktiivsele järeldamisele ja (vähemalt põhimõtteliselt) teadvusele. OPT on formaalselt seotud FEP-iga, kuid erineb oma ontoloogilise lähtekoha poolest: seal, kus FEP käsitleb generatiivset mudelit närviarhitektuuri funktsionaalse omadusena, käsitleb OPT seda esmase metafüüsilise entiteedina.
Multiversum ja vaatleja valik. Tegmarki matemaatilise universumi hüpotees [10] väidab, et kõik matemaatiliselt kooskõlalised struktuurid eksisteerivad ning et vaatlejad leiavad end isevalitud struktuurides. OPT on selle vaatega kooskõlas, kuid pakub eksplitsiitse valikukriteeriumi — Stabiilsusfiltri — selle asemel, et jätta valik implitsiitseks. Barrow ja Tipler [4] ning Rees [5] dokumenteerivad antropilise peenhäälestuse piiranguid, millele iga vaatlejat toetav universum peab vastama; OPT sõnastab need ümber Stabiilsusfiltri ennustustena.
Väljateoreetilised teadvusmudelid. Strømme [6] pakkus hiljuti välja matemaatilise raamistiku, milles teadvus on fundamentaalne väli \Phi, mille dünaamikat juhib Lagrange’i tihedus ja mille kokkuvarisemine konkreetsetele konfiguratsioonidele modelleerib individuaalsete meelte esiletõusu. OPT suhestub selle raamistikuga võrdlevalt, mitte omaksvõtvalt: see ei päri Strømme väljavõrrandeid ega mõtteoperaatoreid, vaid kasutab mudelit kontrastse taustana, et sõnastada, kuidas mittereduktiivset ontoloogiat võiks selle asemel rekonstrueerida informatsioonilistes terminites. 4. jaotis teeb selle võrdleva struktuurse vastenduse eksplitsiitseks.
Kolmogorovi keerukus ja teooriavalik. Solomonoffi induktsioon [11] ja minimaalne kirjelduse pikkus [12] pakuvad formaalseid raamistikke teooriate võrdlemiseks nende generatiivse keerukuse alusel. Me kasutame neid raamistikke 5. jaotises, et muuta ökonoomsuse väide täpseks.
Evolutsiooniline liidese teooria. Hoffmani „Conscious Realism” ja taju liidese teooria [25] väidavad, et evolutsioon kujundab sensoorseid süsteeme toimima lihtsustatud „kasutajaliidesena”, mis varjab objektiivset reaalsust kohasuskasu nimel. OPT jagab täpselt sama eeldust, et füüsiline aegruum ja objektid on renderdatud ikoonid (Pakkekoodek), mitte objektiivsed tõed. Kuid OPT lahkneb põhimõtteliselt oma matemaatilise aluse poolest: seal, kus Hoffman tugineb evolutsioonilisele mänguteooriale (kohasus võidab tõe), tugineb OPT algoritmilisele informatsiooniteooriale ja termodünaamikale, tuletades liidese otseselt Kolmogorovi keerukuse piiridest, mis on vajalikud, et vältida vaatleja voo suure ribalaiusega termodünaamilist kollapsit.
3. Formaalne raamistik
3.1 Algoritmiline substraat
Olgu \mathcal{I} tähistuseks informatsioonilisele substraadile — teooria fundamentaalsele entiteedile. Formaliseerime \mathcal{I} mitte kaalumata trajektooride ansamblina, vaid tõenäosusruumina lõplike vaatlusprefiksite x \in \{0,1\}^* üle, mis on varustatud universaalse seguga alumiselt poolarvutatavate poolmõõtude klassi \mathcal{M} suhtes:
\xi(x) = \sum_{\nu \in \mathcal{M}} w_\nu \nu(x), \qquad w_\nu \asymp 2^{-K(\nu)} \tag{1}
kus K(\nu) on poolmõõdu \nu prefiks-Kolmogorovi keerukus.
See formuleering kehtestab algoritmilise infoteooria [27] raamistikus range alusoleku. Võrrand ei eelda mingeid konkreetseid struktuurseid seadusi ega füüsikalisi konstante; pigem domineerib see struktuurselt iga arvutatava jaotuse üle (\xi(x) \ge w_\nu \nu(x)), omistades loomulikul viisil suurema statistilise kaalu tugevalt kokkusurutavatele (korrastatud) jadadele. Kuid lihtsad korduvad jadad (nt 000...) ei suuda kanda enesele osutava vaatleja jaoks vajalikke mittetasakaalulisi keerukusi. Seetõttu peavad vaatlejat toetavad protsessid moodustama spetsiifilise alamhulga: need nõuavad piisavat algoritmilist kokkusurutavust, et rahuldada infopudelikaela tingimus, ent samas piisavat struktuurset rikkust (“nõutav mitmekesisus”), et teostada aktiivset järeldamist. Filosoofiliselt piirab võrrand (1) substraadi arvutatavate konfiguratsioonidega, tagades, et alusolek on rangelt määratletud.
3.2 Prediktiivne pudelikael ja määr-moonutus
Substraat \mathcal{I} sisaldab iga arvutatavat hüpoteesi, millest valdav enamus on kaootilised. Selleks et kogeda pidevat, navigeeritavat reaalsust, peab voog võimaldama madala keerukusega prediktiivset representatsiooni, mis mahub läbi vaatleja lõpliku kognitiivse pudelikaela.
Oluline on see, et pakkimist nõudev toorandmete koormus ei piirdu üksnes eksterotseptiivse sensoorse sisendi \sim 10^9 bitiga sekundis. See hõlmab ulatuslikku eelteadlikku integratsioonivälja: sisemiste generatiivsete seisundite paralleeltöötlust, pikaajalise mälu taastamist, homeostaatilisi prioreid ja alateadlikku sünaptilist modelleerimist. Stabiilsusfilter piirab kogu selle tohutu pideva paralleelvälja jada-väljundi ühtseks teadlikuks tööruumiks.
Me defineerime puhtalt virtuaalse Stabiilsusfiltri formaalselt kui projektiivse piirtingimuse, mis rahuldab prediktiivse informatsiooni pudelikaela [28]. Olgu \overleftarrow{Y} vaatleja koguseisundi minevik, \overrightarrow{Y} selle tulevik ja Z kokkusurutud siseseisund. Vaatleja on määratletud rangelt piiratud kaadripõhise prediktiivse võimekusega B_{\max} (bittides fenomenaalse kaadri kohta) ning diskreetse tajulise uuendusaknaga \Delta t, mis määratleb ühe fenomenaalse kaadri. Fenomenaalne aeg on koodeki kaadrite arv n; iga määr kujul „bitid host-sekundi kohta” on tuletatud suurus C_{\max}^H = \lambda_H \cdot B_{\max} = B_{\max}/\Delta t, kus \lambda_H = dn/d\tau_H on hosti suhteline kaadrisagedus (sünteetilise vaatleja skaleerimise kohta vt lisa E-5). See kehtestab range staatilise mahutavuse iga teadliku hetke kohta: B_{\max} bitti kaadri kohta.
Inimese empiiriline kalibreerimine. Bioloogiliste inimvaatlejate puhul on B_{\max} \approx 0.5–1.5 bitti kaadri kohta ja \Delta t \approx 50 ms, mis annab C_{\max}^{\text{human}} \approx \mathcal{O}(10) bitti/s [2, 23, 66, 67]. See arv on neuronite tulemissagedustel toimivate bioloogiliste inimeste omadus. See ei esine vaatleja formaalses definitsioonis; sünteetilised vaatlejad on määratletud sama B_{\max}/\Delta t struktuuri kaudu arhitektuurist tuletatud väärtustega, mis ei pea kattuma bioloogilise näitajaga (vt §7.8, §8.14 ja lisa E-5).
Saavutatav prediktiivne informatsioon on antud kujul:
R_{\mathrm{pred}}(D) = \inf_{p(z \mid \overleftarrow{y}) \,:\, I(\overleftarrow{Y};\overrightarrow{Y} \mid Z) \le D} I(\overleftarrow{Y}; Z) \tag{2}
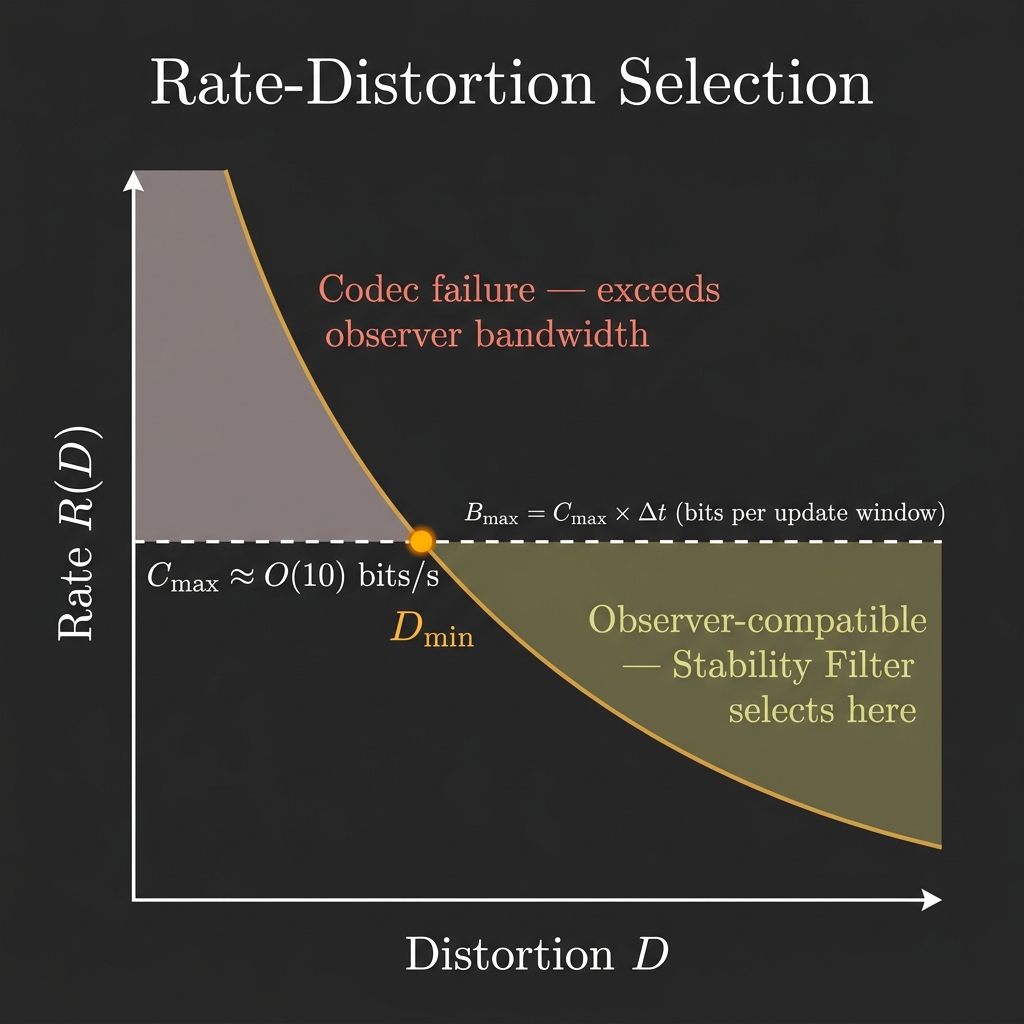
Protsess on vaatlejaga ühilduv siis, kui selle nõutav prediktiivne informatsioon kognitiivse tsükli kohta mahub sellesse puhvrisse: R_{\mathrm{pred}}(D_{\min}) \le B_{\max}, kus D_{\min} on ellujäämiseks maksimaalselt talutav moonutus. See kehtestab mõõtmelise ranguse: tuleviku ennustamiseks talutava vea piires vajalik bittide koguarv ei tohi ületada diskreetses „praeguses” füüsiliselt saadaolevate bittide hulka. Sobivate statsionaarsete ergoodiliste protsesside korral ja täpse ennustuse piirjuhul (D \to 0) toimib minimaalne maksimaalselt prediktiivne representatsioon Z minimaalse piisava statistiku kandidaadina, koondudes sageli \epsilon-masina põhjuslike seisundite partitsiooni suunas [29]. Kuigi täielik ekvivalentsus nõuab rangeid statsionaarsuse eeldusi, kehtestab võrrand (2) formaalse valikusurve kõige kokkusurutumale fenomenoloogilisele füüsikale, mis on kooskõlas põhjusliku koherentsusega. Lisaks, kui selle põhjusliku seisundiruumilise topoloogiline struktuur kõigub kiiremini, kui uuendusaken \Delta t suudab jälgida, variseb renderdus kokku Narratiivi lagunemiseks.
3.3 Patch’i geomeetria: informatsiooniline põhjuslik koonus
Korrastatud patch’i teooriat (OPT) kirjeldatakse sageli intuitiivselt kui lokaliseeritud stabiilsuse „saart” kaootilise müra meres. Topoloogiliselt on see ebatäpne. Patch’i geomeetria formaliseerimiseks defineerime lokaalse prediktiivse patch’i mudeli.
Olgu G=(V, E) piiratud astmega graaf, mis esitab substraadi lokaalset piirkonda. Iga tipp v \in V kannab lõplikku olekut x_v(t) \in \mathcal{A}, kus tähestiku suurus on |\mathcal{A}| = q. Täielik mikroolek uuendusel t on X_t = (x_v(t))_{v \in V} \in \mathcal{A}^V. Eeldame lõpliku ulatusega R lokaalseid stohhastilisi dünaamikaid:
p(X_{t+1} \mid X_t, a_t) = \prod_{v \in V} p_v\big(x_v(t+1) \mid X_t|_{N_R(v)}, a_t\big) \tag{3}
kus N_R(v) on tipu v raadiusega R naabruskond ning a_t on vaatleja tegevus.
Vaatleja ei kanna kogu patch’i olekut; ta kannab kokkusurutud latentset olekut Z_t \in \{1, \dots, 2^B\}, kus B = C_{\max} \Delta t. Oluline on, et vaatleja valib Z_t range prediktiivse pudelikaela eesmärgi kaudu:
q^\star(z \mid X_t) = \arg\min_q \Big[ I(X_t; Z_t) - \beta I(Z_t; X_{t+1:t+\tau}) \Big] \quad \text{subject to } I(X_t; Z_t) \le B \tag{4}
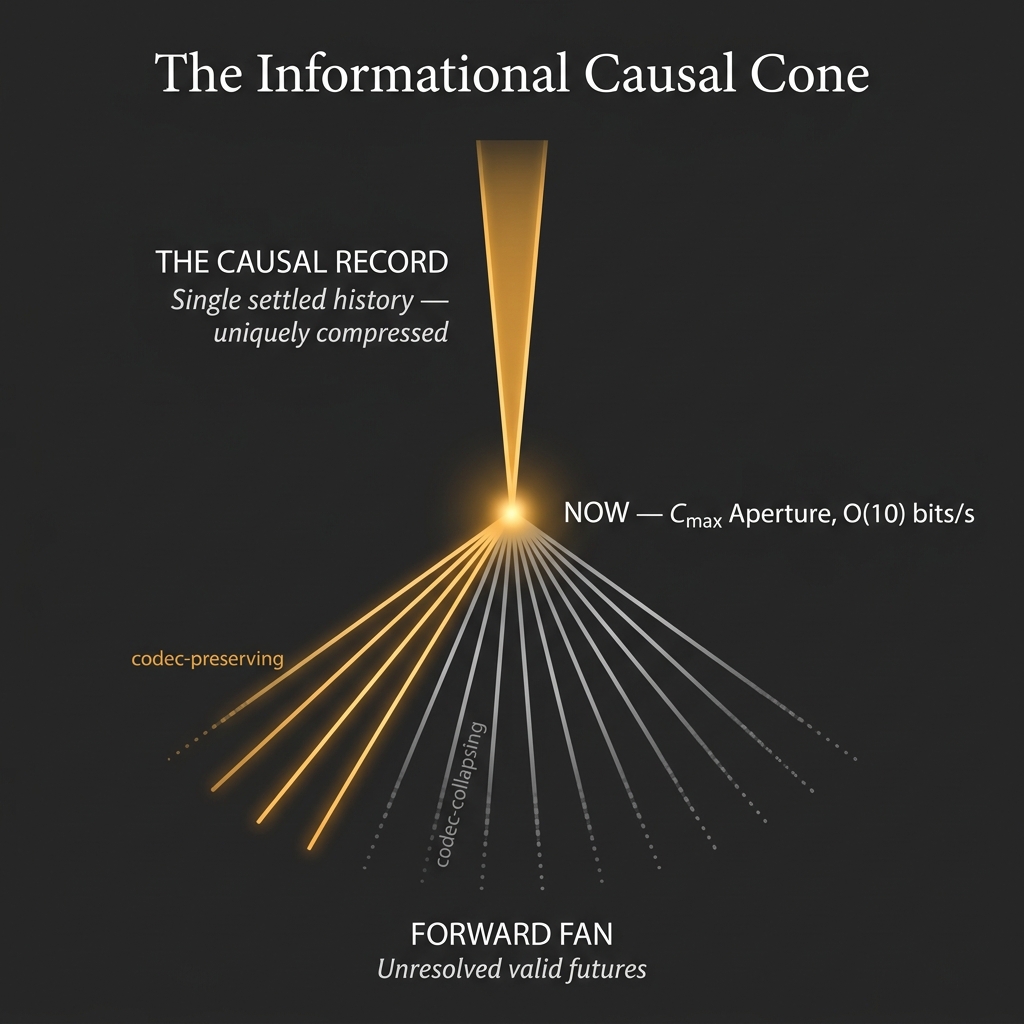
See on taandatud OPT-vaatleja: lokaalne maailm, piiratud kood ja prediktiivne pakkimine. See formaliseerib põhjusliku koonuse komponendid:
- Põhjuslik register R_t = (Z_0, Z_1, \dots, Z_t): unikaalselt kokkusurutud, madala entroopiaga põhjuslik ajalugu, mis on juba renderdatud.
- Praegune apertuur: range ribalaiuse pudelikael, mis piirab lokaalseid muutujaid.
- Prediktiivne Harude Hulk (\mathcal{F}_h): tulevaste latentsete jadade paljusus. Horisondi h ulatuses on lubatavate tulemuste hulk formaalselt defineeritud järgmiselt:
\mathcal{F}_h(z_t) := \Big\{ z_{t+1:t+h} : p(z_{t+1:t+h} \mid z_t, a_{t:t+h-1}) > 0 \Big\} \tag{5}
Kuna vaatleja lahendab iga uuenduse kohta ainult B bitti, on vaatleja poolt eristatavate tulevike arv rangelt piiratud kanali läbilaskevõimega: \log |\mathcal{F}_h(z_t)| \le Bh. Seega ei ole see harude hulk pelgalt kontseptuaalne kujutis; see on koodiga piiratud hargnev puu.
Sõnasõnaline informatsiooniline põhjuslik koonus. Kuna uuenduste ulatus on R, ei saa häiring levida kiiremini kui R graafisammu ühe uuenduse kohta. Kui häiringu kandja on ajal t hulk S, siis pärast h uuendust kehtib \operatorname{supp}(\delta X_{t+h}) \subseteq N_{Rh}(S). Seega on „informatsiooniline põhjuslik koonus” lokaalsuse otsene geomeetriline tagajärg, kehtestades fenomenoloogilisele levikule efektiivse lokaalse kiiruspiiri v_{\max} = R / \Delta t.
Narratiivi lagunemine. Substraadi kaos ei ümbritse patch’i ruumiliselt; pigem sisaldub see harude hulga läbimata harudes. Kuna ekstraheeritud olek Z_t on rangelt piiratud (H(Z) \le B), tuleb ebastabiilsust hinnata kokkusurumata, pudelikaela-eelse varu suhtes. Defineerime nõutava prediktiivse määra R_{\mathrm{req}}(h, D_{\min} \mid z_t) = \frac{1}{h} \min_{p(\hat{X} \mid Z_t) : \mathbb{E}[d(X, \hat{X})] \le D_{\min}} I(X_{\partial_R A}(t+1:t+h) ; \hat{X}_{t+1:t+h} \mid Z_t) kui minimaalse informatsioonimäära, mis on vajalik lahendamata füüsiliste piiriolekute jälgimiseks maksimaalselt talutava moonutuse tingimustes. See teravdab Stabiilsusfiltri valikukriteeriume: (a) kui R_{\mathrm{req}} \le B, saab vaatleja säilitada lahendatud narratiivi; (b) kui R_{\mathrm{req}} > B, ületab kokkusurumata Prediktiivne Harude Hulk pudelikaela läbilaskevõime, sundides vaatlejat jämedateralistama harude hulga dekodeerimatuks staatikaks, ning narratiivne stabiilsus nurjub. Vaatleja pidev kogemus on protsess, milles apertuur liigub sellesse harude hulka edasi, indekseerides fenomenoloogiliselt ühe haru põhjuslikku registrisse ilma B ületamata.
Narratiivne triiv (krooniline komplement). Eelnev määratleb ägeda tõrkerežiimi: R_{\mathrm{req}} ületab B ning koodek kogeb koherentsi katastroofilist kokkuvarisemist. Sellel on olemas täiendav krooniline tõrkerežiim, mis ei käivita ühtegi tõrkesignaali. Kui sisendvoogu X_{\partial_R A}(t) eelfiltreerib süstemaatiliselt väline mehhanism \mathcal{F} — tekitades kureeritud signaali X' = \mathcal{F}(X), mis on sisemiselt kooskõlaline, kuid välistab ehtsa substraadiinformatsiooni — siis ilmutab koodek väikest ennustusviga \varepsilon_t, läbib tõhusaid Hooldustsükleid ning rahuldab tingimuse R_{\mathrm{req}} \le B, olles samal ajal substraadi suhtes süstemaatiliselt ekslik. Otsustav on see, et Stabiilsusfilter ei suuda defineeritud kujul neid juhtumeid eristada: kokkusurutavus on truuduse suhtes agnostiline. Aja jooksul kustutab MDL-i kärpimisetapp (§3.6.3, võrrand T9-3) õigesti need koodeki komponendid, mis enam filtreeritud voogu ei ennusta, halvendades pöördumatult koodeki võimet modelleerida välistatud signaali (Lisa T-12, teoreem T-12). See kustutamine on iseennast võimendav: kärbitud koodek ei suuda enam tuvastada omaenda võimekuse kadu (teoreem T-12a, otsustamatuse piir). Struktuurne kaitse seisneb Markovi teki \partial_R A ületavate \delta-sõltumatute sisendkanalite redundantsuses (teoreem T-12b, Substraaditruuduse tingimus). Täielik formaalne käsitlus on toodud lisas T-12; eetilised tagajärjed — sealhulgas Komparaatori hierarhia ja Korruptsioonikriteerium — on esitatud kaasnevas eetikatekstis [SW §V.3a, §V.5].
3.4 Patch’i dünaamika: järeldamine ja termodünaamika
Valitud patch’i sees formaliseeritakse füüsikaseaduste struktuur mitte deterministliku kujutusena, vaid efektiivse stohhastilise tuumana, mis juhib prediktiivseid seisundeid z:
z_{t+1} \sim K_\theta(\cdot \mid z_t, a_t), \qquad y_{t+1} \sim O_\theta(\cdot \mid z_{t+1}) \tag{6}
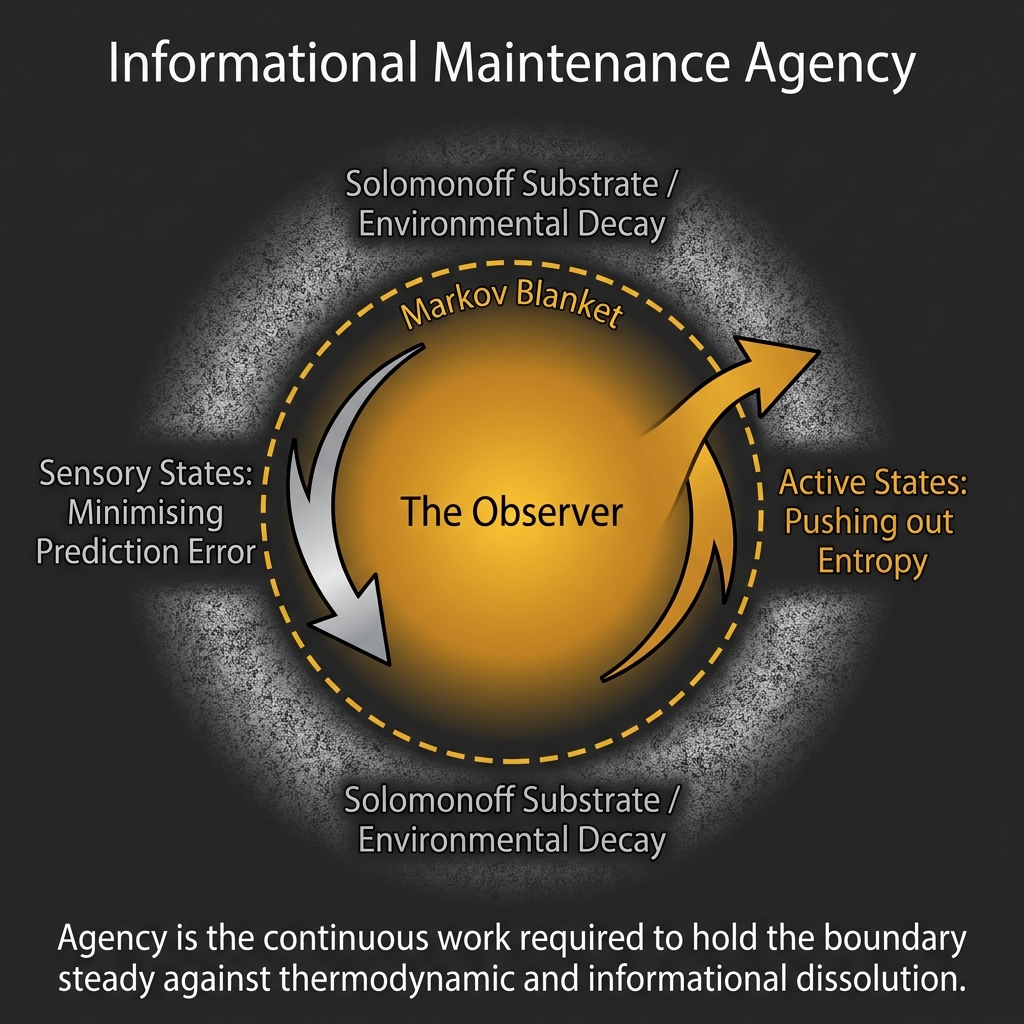
Piir, mis eristab vaatlejat ümbritsevast informatsioonilisest kaosest, määratletakse informatsioonilise Markovi tekina, mis vastab vaatleja patch’ile A \subset V. Selle piiri sees toimuvat dünaamikat — agendi lähendusi patch’ile — juhib aktiivne järeldamine Vaba Energia Printsiibi alusel [9].
Piiritlevat võimekust saame formaalselt määratleda prediktiivse lõike entroopia kaudu:
S_{\mathrm{cut}}(A) := I(X_A ; X_{V \setminus A}) \tag{7}
Eeldades, et valitud patch on ajaviilus lokaalselt Markovlik, varjestab piirikest \partial_R A rangelt sisemuse A^\circ välisest V \setminus A, nii et X_{A^\circ} \perp X_{V\setminus A} \mid X_{\partial_R A}. Järelikult:
S_{\mathrm{cut}}(A) = I(X_{\partial_R A} ; X_{V \setminus A}) \le H(X_{\partial_R A}) \le |\partial_R A| \log q \tag{8}
Kuna Z_t on X_A mahupiiranguga pakkimine, tagab andmetöötluse võrratus, et I(Z_t ; X_{V \setminus A}) \le |\partial_R A| \log q. Kui substraadigraaf G lähendab d-mõõtmelist võret, siis |\partial_R A| \sim \operatorname{area}(A), mitte ruumala.
Seega annab OPT rangelt võttes tõelise klassikalise piirseaduse [39]. Tulevaste struktuursete edasiarenduste jaoks saame konstrueerida formaalse epistemilise redeli: 1. Klassikaline pindalaseadus: S_{\mathrm{cut}} \sim |\partial_R A|, tuletatud puhtalt lokaalsusest ja Markovi varjestusest. 2. Kvanttäiendus: von Neumanni põimumisentroopia skaleerumine muutub kättesaadavaks ainult siis, kui jämedad prediktiivsed muutujad Z_t võimaldavad formaalset Hilberti ruumi / kvantveaparanduskoodi põimingut. 3. Holograafiline täiendus: tõeline geomeetriline holograafiline duaalsus tekib ainult siis, kui asendame pudelikaelkoodeki Z_t hierarhilise tensorvõrguga, tõlgendades S_{\mathrm{cut}} ümber geomeetrilise min-lõikena.
Kindlustades esmalt klassikalise piirseaduse, annab OPT tugeva matemaatilise aluspõranda — tingimusel, et kehtib Markovi varjestuse eeldus (X_{A^\circ} \perp X_{V \setminus A} \mid X_{\partial_R A}) — millelt saab turvaliselt üles ehitada spekulatiivsemaid kvantformalisme.
Vaatleja toime formaliseeritakse variatsioonilise vaba energia F[q, \theta] kaudu:
F[q,\theta] = \mathbb{E}_q[-\log p_\theta(y_{1:T}, z_{1:T} \mid a_{1:T})] + \mathbb{E}_q[\log q(z_{1:T})] \tag{9}
Oluline on see, et see kehtestab range matemaatilise lahususe: substraadi aprioorne jaotus valib hüpoteesiruumi, virtuaalne Stabiilsusfilter (4) piirab võimekusega kooskõlalist struktuuri ning FEP (9) juhib agenditasandi järeldamist selle piiratud struktuuri sees. Füüsika ei esile kerki mitte Vaba Energia funktsionaalina, vaid stabiilse struktuurina K_\theta, mida Vaba Energia funktsionaal edukalt jälgib.
Lisaks kaasneb selle teadliku renderduse alalhoidmisega vältimatu termodünaamiline kulu. Landaueri printsiibi [52] järgi hajutab iga loogiliselt pöördumatu biti kustutamine vähemalt k_B T \ln 2 soojust. Samastades ühe pöördumatu kustutamise iga pudelikaela uuendusega (parima võimaliku arvestusliku eelduse korral), nõuab teadvuse füüsiline jalajälg minimaalset hajumist:
P_{\text{render}} \ge \dot{N}_{\text{erase}} \cdot k_B T \ln 2 \ge C_{\max} \cdot k_B T \ln 2 \tag{10}
See on parima võimaliku juhu alampiir eeldusel, et iga uuenduse kohta toimub üks kustutamine — mitte ribalaiuse kui sellise üldine tagajärg. Saadud piir (\sim 10^{-19} W) jääb tegelikule neuraalsele hajumisele (~20W) tohutult alla, peegeldades bioloogilise teostuse hiiglaslikku termodünaamilist üldkulu. Võrrand (10) kehtestab range teoreetilise aluspõranda mis tahes sellise substraadi minimaalsele võimalikule füüsilisele jalajäljele, mis instantsieerib C_{\max}-iga piiratud teadliku renderduse.
(Märkus: eelnevad termodünaamilised ja informatsioonilised piirid reguleerivad rangelt reaalaja uuendusribalaiust C_{\max}. See ei hõlma siiski vaatleja püsiseisundi täielikku kogemuslikku mõõtmelisust ega seda, kuidas koodek haldab omaenda keerukust pika aja jooksul. Need struktuursed mehhanismid — rikkaliku kogemuse Fenomenaalse seisundi tensori formulatsioon ning une/unenägemise aktiivne hooldustsükkel — tuletatakse täielikult allpool §3.5 ja §3.6.)
3.5 Fenomenaalse seisundi tensor ja prediktsiooni asümmeetria
3.5.1 Kogemusliku tiheduse mõistatus
§§3.1–3.4 formaalne aparaat piirab edukalt teadvusliku vaatleja
uuenduste läbilaskevõimet mahtuvuse ülempiiri C_{\max} \approx \mathcal{O}(10) bitti/s
kaudu.
Fenomenaalne kogemus esitab aga vahetu struktuurse mõistatuse: üheainsa
visuaalse hetke tajutud rikkus — värvi, sügavuse, tekstuuri, heli,
propriotseptsiooni ja afekti samaaegne kohalolu — ületab tohutult selle
informatsioonihulga, mida C_{\max}
suudaks edastada ühesainsas uuendusaknas \Delta t \approx 50\ \text{ms}.
Maksimaalne uus informatsioon, mis ühe teadvusliku hetke jooksul lahendatakse, on:
B_{\max} = C_{\max} \cdot \Delta t \approx 10\ \text{bits/s} \times 0.05\ \text{s} = 0.5\ \text{bits} \tag{T8-1}
See on märksa vähem kui üks bitt tõeliselt uudset informatsiooni tajukaadri kohta, ometi näib fenomenaalne stseen informatsiooniliselt tihe. Selle lahknevuse lahendamiseks ilma kitsast uuendusribalaiust paisutamata peame selgesõnaliselt eristama kaht struktuurselt erinevat suurust: 1. C_{\max} — uuenduste läbilaskevõime: prediktsioonivea signaali määr, mis lahendatakse ajaühikus väljakujunenud põhjuslikku registrisse. 2. C_{\text{state}} — püsiseisundi keerukus: parajasti laaditud ja aktiivse generatiivse mudeli Kolmogorovi keerukus K(P_\theta(t)).
Need ei ole üks ja sama suurus. C_{\max} määrab värava; C_{\text{state}} iseloomustab ruumi. Käesoleva jaotise ülejäänud osa täpsustab selle eristuse ning toob sisse Fenomenaalse seisundi tensori P_\theta(t) kui formaalse objekti, mis vastab püsivale sisemisele stseenile.
3.5.2 Prediktsiooni asümmeetria: ülespoole suunduvad vead ja allapoole suunduvad ennustused
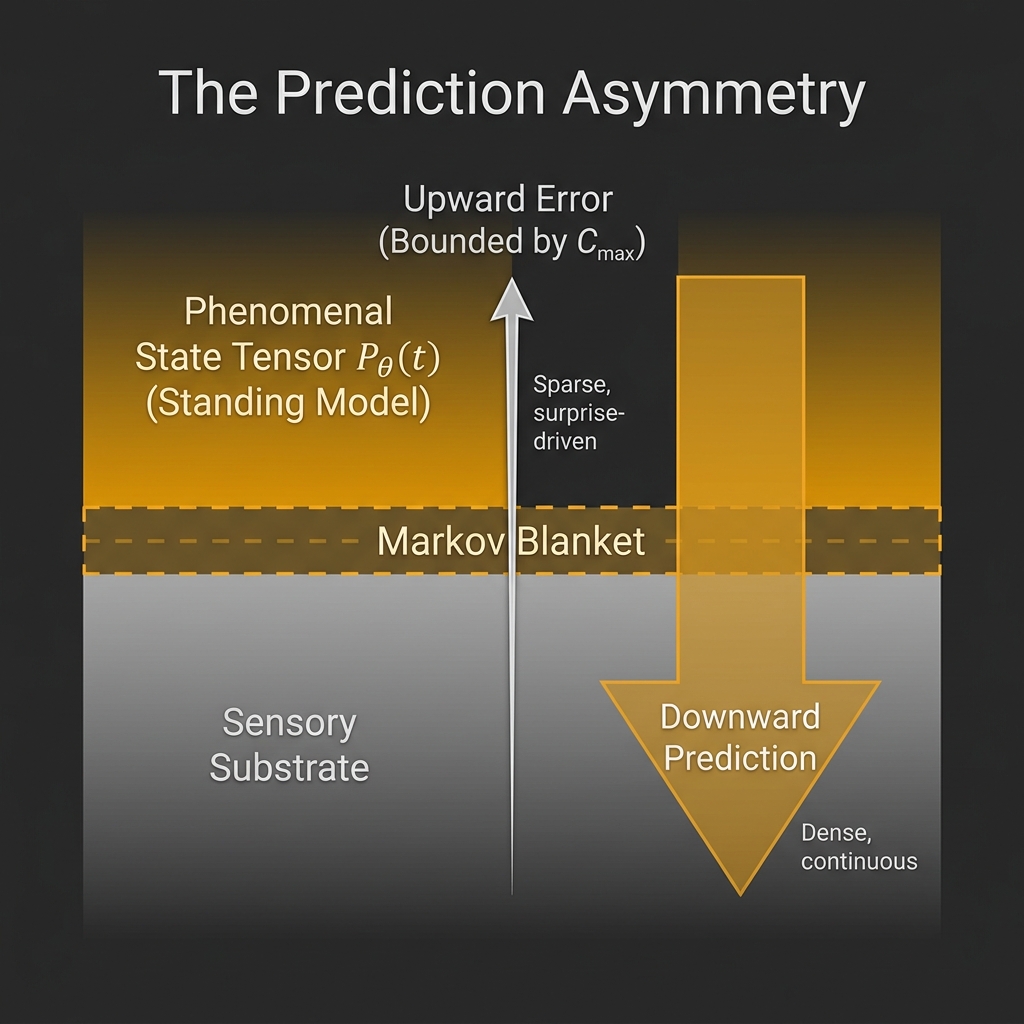
OPT pärib prediktiivse töötluse arhitektuuri (Clark [82], Hohwy [83]; vt §7.3), milles koodek K_\theta toimib hierarhilise generatiivse mudelina. Selle arhitektuuri korral läbivad Markovi teki \partial_R A samaaegselt kaks eristuvat infovoogu:
Ülespoole suunduv voog (ennustusviga, \varepsilon_t): lahknevus K_\theta praeguse ennustuse ja \partial_R A-ni saabuva sensoorse signaali vahel. See on korrigeeriv signaal. See on hõre, üllatusest ajendatud ja rangelt mahupiiranguga.
Allapoole suunduv voog (ennustus, \pi_t): generatiivse mudeli aktiivne eeldatavate sensoorsete seisundite renderdus, mis levib hierarhia kõrgematelt tasanditelt madalamatele. See on stseen ise. See on tihe, pidev ja tuletatud K_\theta täielikust parametriseeritusest.
Formaalselt olgu sensoorse piiri seisund X_{\partial_R A}(t) ning koodeki ennustatud piiriseisund:
\pi_t := \mathbb{E}_{K_\theta}\!\left[X_{\partial_R A}(t) \mid Z_t\right] \tag{T8-2}
Siis on ennustusviga:
\varepsilon_t := X_{\partial_R A}(t) - \pi_t \tag{T8-3}
C_{\max} piirab veasignaali, mitte ennustust. Vastastikune informatsioon veasignaali ja pudelikaela-seisundi vahel rahuldab tingimust:
I(\varepsilon_t\,;\,Z_t) \leq C_{\max} \cdot \Delta t = B_{\max} \tag{T8-4}
Ennustus \pi_t seevastu pärineb täielikust generatiivsest mudelist ega allu sellisele piirangule. Selle informatsioonilist sisu piirab üksnes K_\theta enda keerukus. See asümmeetria on formaalne alus, mille põhjal eristada fenomenaalset rikkust uuendus-ribalaiusest.
3.5.3 Definitsioon: Fenomenaalse seisundi tensor P_\theta(t)
Me defineerime Fenomenaalse seisundi tensori P_\theta(t) algupäraselt kui täieliku püsiva aktiivse parameetrialamhulga generatiivsest mudelist, mida kasutatakse projektsiooniks läbi Markovi teki ajahetkel t:
P_\theta(t) := \bigl\{\, K_\theta(\cdot,\, \cdot) \,\bigr\}_{\text{active}} \tag{T8-5}
See tähendab, et P_\theta(t) on täielik parameetritega määratletud arhitektuur, mida koodek parajasti hoiab valmis selleks, et genereerida ennustusi jälgitavate piirseisundite X_{\partial_R A} üle, hinnatuna sõltumatult kokkusurutud latentseisundi Z_t ja tegevuse a_t ühestki konkreetsest instantsiatsioonist. Selle struktuurset keerukust iseloomustab loomulikul viisil selle käesoleva püsiva parameetrikonfiguratsiooni Kolmogorovi keerukus:
C_{\text{state}}(t) := K\!\left(P_\theta(t)\right) \tag{T8-6}
kus K(\cdot) tähistab prefiks-Kolmogorovi keerukust. C_{\text{state}}(t) on püsiseisundi keerukus — bittide arv kokkusurutud struktuuris, mida koodek parajasti aktiivses kasutuses hoiab.
Piirikanali voo ülempiir. Vastastikune informatsioon pudelikaelaseisundi ja piiri vahel on piiratud standardsete Shannoni võrratustega [16] (baasartikli võrrand 8):
I\!\left(Z_t\,;\,X_{\partial_R A}\right) \leq H\!\left(X_{\partial_R A}\right) \leq |\partial_R A|\cdot \log q \tag{T8-7}
See piirab kanalivoogu üle Markovi teki — suurusjärgult palju suuremana kui B_{\max}. Oluline täpsustus: see on piir Shannoni-teoreetilisele vastastikusele informatsioonile I(Z_t\,;\,X_{\partial_R A}), mitte piir püsiva mudeli Kolmogorovi keerukusele K(P_\theta(t)). Shannoni entroopia kvantifitseerib ansambli keskmist määramatust; Kolmogorovi keerukus kvantifitseerib konkreetse arvutatava objekti kirjelduspikkust. Nende suuruste vahel ei ole ilma täiendavate eeldusteta (nt universaalne prior mudeliklasside üle) üldist võrratust, mis neid seoks. Seetõttu me ei väida, et C_{\text{state}} \leq H(X_{\partial_R A}). Püsiseisundi keerukus C_{\text{state}} on piiratud empiiriliselt (§3.10), mitte piiri entroopia kaudu.
Heuristiline alampiir suurusele C_{\text{state}}. Stabiilsusfilter piirab otseselt ainult uuendusmäära R_{\text{req}} \leq B_{\max}, mitte püsiva mudeli sügavust. Kuid koodek, mille struktuurne keerukus on ebapiisav, ei suuda genereerida täpseid ennustusi \pi_t, mis vastaksid keeruka keskkonna statistikale üle prediktiivse harude hulga \mathcal{F}_h(z_t). See seab suurusele C_{\text{state}} praktilise miinimumi: allpool teatavat läve ületaks R_{\text{req}} süstemaatiliselt väärtust B_{\max}, sest ennustusvead \varepsilon_t oleksid püsivalt suured. See alampiir on empiiriliselt motiveeritud, mitte formaalselt tuletatud — praegu ei ole saadaval suletud kujuga avaldist C_{\text{state}} \geq f(R_{\text{req}}, \text{environment statistics}).
Materialiseeritud vs dispositsiooniline tõlgendus (avatud küsimus). Ülal defineeritud P_\theta(t) võimaldab kahte tõlgendust, mida raamistik praegu formaalselt ei erista: (a) materialiseeritud tõlgendus, mille korral P_\theta(t) on tihe, hetkega laaditud representatsioon, mille rikkus on igas kaadris aktiivsel kujul olemas, ja (b) dispositsiooniline tõlgendus, mille korral P_\theta(t) on generatiivne võimekus — püsiv programm, mis suudab stseeni nõudmisel renderdada, ilma et kogu see sisu oleks päringu ja vastuse vahel materialiseeritud. Mõlemad on kooskõlas ülaltoodud piirikanali ja heuristilise alampiiri klauslitega ning §3.5.6 empiirilise teesiga, et rikkus korreleerub suurusega K(K_\theta), mitte uuendusribalaiusega. Need erinevad selles, mida tähendab „laaditud“, ja selles, mida tuleks mõõta, kui sondeerida otse K(P_\theta)-d. Kolmogorovi keerukus üksi ei erista neid: väike K(P_\theta) võib toetada suurt loogilist sügavust, suurt päring-vastus-võimekust või pikka käitusaja jooksul toimuvat laienemist. Me võtame siin kanoonilise tõlgendusena omaks dispositsioonilise lugemi — P_\theta(t) on aktiivne dispositsiooniline generatiivne seisund, millest stseeni saab pärida/renderdada, mitte tingimata täielikult materialiseeritud tihe stseeniobjekt — märkides samal ajal materialiseeritud tõlgenduse konkureeriva operacionaliseeringuna, mille tulevane empiiriline töö võib välja valida.
3.5.4 Blocki eristuse struktuurne järeldus
Formaalne eristus P_\theta(t) ja Z_t vahel vastab täpselt Ned Blocki eristusele fenomenaalse teadvuse (P-teadvus) ja ligipääsuteadvuse (A-teadvus) vahel [47]:
| Blocki kategooria | OPT objekt | Informatsiooniline sisu | Ribalaiusega piiratud? |
|---|---|---|---|
| P-teadvus (kvaalid, kogetud stseen) | P_\theta(t) | C_{\text{state}} = K(P_\theta(t)) \gg B_{\max} | Ei |
| A-teadvus (raporteeritav sisu) | Z_t | B_{\max} = C_{\max} \cdot \Delta t \approx 0.5\ \text{bits} | Jah |
OPT järgi on P-teadvus allasuunaline prediktsioon \pi_t, mis on tuletatud täielikust tensorist P_\theta(t). A-teadvus on pudelikaela väljund Z_t — stseeni õhuke lõik, mis on piisavalt kokku pakitud, et siseneda põhjuslikku registrisse \mathcal{R}_t ja muutuda raporteeritavaks. Visuaalse hetke kogetud rikkus on P_\theta(t); võime öelda „Ma näen punast” eeldab, et see tunnus läbib Z_t.
See järeldus lahendab näilise paradoksi, mille kohaselt rikkalik fenomenaalne stseen püsib alambitise uuenduskanali toel: stseeni ei edastata kanali kaudu igal kaadril — see on P_\theta(t)-s juba laetud. Kanal ajakohastab seda järk-järgult ja valikuliselt, kaader kaadri haaval.
3.5.5 P_\theta(t) uuendusdünaamika
P_\theta(t) uuendusreeglit määrab läbi pudelikaela filtreeritud ennustusvea signaal \varepsilon_t:
P_\theta(t+1) = \mathcal{U}\!\left(P_\theta(t),\, \varepsilon_t,\, Z_t\right) \tag{T8-8}
kus \mathcal{U} on koodeki õppimisoperaator — aktiivse järeldamise terminites variatsioonilise vaba energia \mathcal{F}[q, \theta] gradiendisamm (baasartikli võrrand 9), mida piirab mahtuvuspiirang I(X_t\,;\,Z_t) \leq B.
Peamine struktuurne omadus on see, et \mathcal{U} on selektiivne: uuendatakse ainult neid P_\theta(t) piirkondi, mis on seotud parajasti esineva ennustusveaga \varepsilon_t. Ülejäänud püsiv tensor hoitakse kaadri vältel muutumatuna. See annab teadvuslikule momendile selle iseloomuliku struktuuri: stabiilse fenomenaalse tausta, millele asetub väike lahendatud uudsuse esiplaan.
Seega teostab koodek ühe hõreda uuenduse tihedal prioril põhineva vormi — disainiprintsiibi, mis maksimeerib fenomenaalset koherentsust uuendusribalaiuse ühiku kohta.
3.5.6 Ulatus ja epistemiline staatus
Fenomenaalse seisundi tensor P_\theta(t) on formaalne iseloomustus struktuursest varjust, mille fenomenaalne stseen peab heitma, kooskõlas Agentsuse aksioomiga (§3.6). See ei lahenda rasket probleemi. OPT käsitleb fenomenaalset teadvust jätkuvalt taandamatu primitiivina; P_\theta(t) määratleb konteineri geomeetria, mitte selle sisu loomuse.
Väide on struktuurne ja falsifitseeritav järgmises mõttes: kui raporteeritud kogemuse kvalitatiivne rikkus (nagu seda operationaliseeritakse näiteks fenomenaalse keerukuse mõõdikutega psühhofüüsikalistes ülesannetes) korreleerub koodeki sügavusega — K_\theta hierarhilise keerukusega, mida saab mõõta prediktiivse hierarhia neuraalsete markerite kaudu —, mitte uuendusribalaiusega C_{\max}, siis on eristus P_\theta\,/\,Z_t empiiriliselt toetatud. Psühhedeelsed seisundid, mis muudavad dramaatiliselt K_\theta struktuuri ilma käitumuslikku läbilaset järjekindlalt muutmata, kujutavad endast loomulikku testivaldkonda.
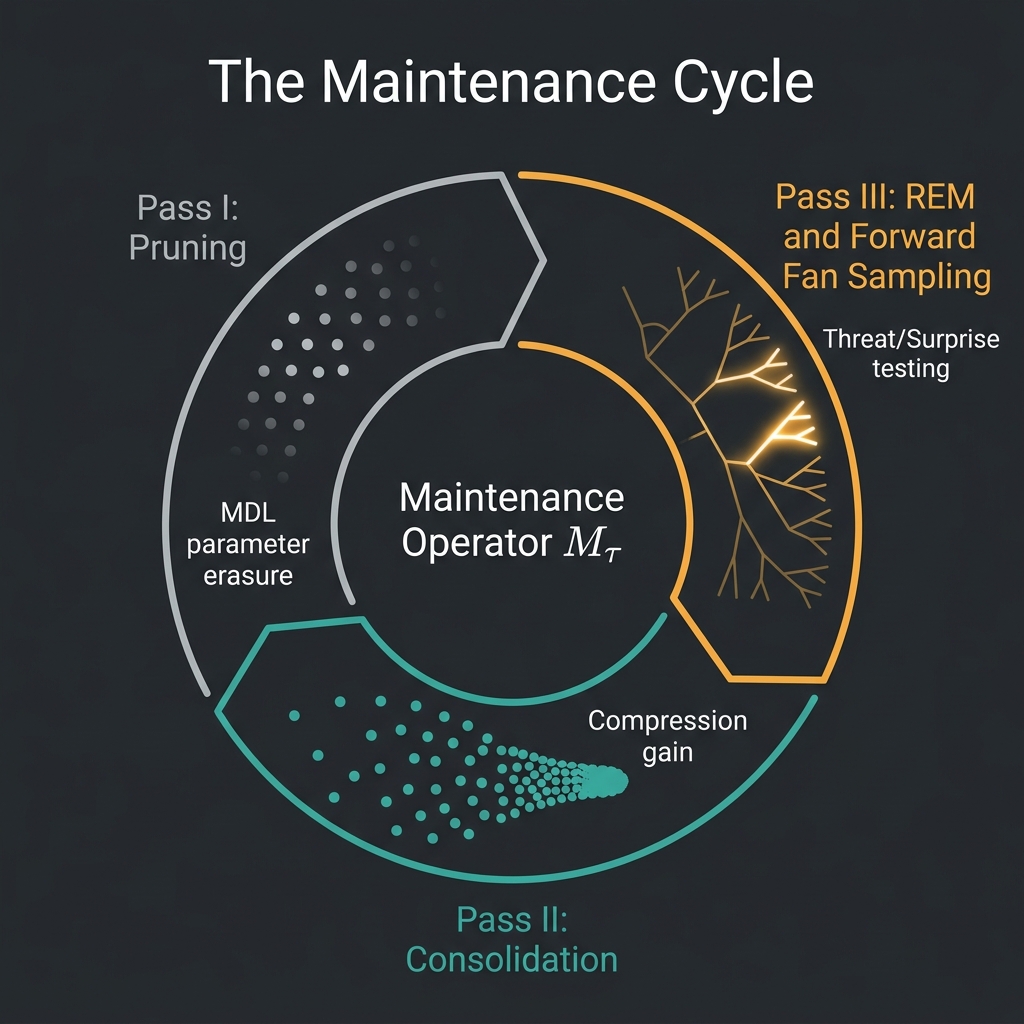
3.6 Koodeki elutsükkel: Hooldustsükli operaator \mathcal{M}_\tau
3.6.1 Staatilise koodeki probleem
§§3.1–3.5 raamistik käsitleb K_\theta-t ja selle realisatsiooni P_\theta(t) dünaamilisena üle uuenduskaadrite, kuid eeldab implitsiitselt, et koodeki struktuurne arhitektuur — parameetriruum \Theta ise — on fikseeritud. See on piisav ühe teadvusmomendi sünkroonseks analüüsiks, kuid ebapiisav teadvuse teooria jaoks sügava aja lõikes.
Pidevalt töötav koodek akumuleerib struktuurset keerukust: iga õpitud muster lisab K_\theta-le parameetreid, suurendades C_{\text{state}}(t). Ilma kontrollitud keerukuse vähendamise mehhanismita kasvaks C_{\text{state}} monotoonselt, kuni koodek ületaks oma termodünaamilise käitatavuse ülempiiri — punkti, kus P_\theta(t) säilitamise metaboolne kulu ületab organismi energiabilansi või kus K_\theta sisemine keerukus ületab Stabiilsusfiltri võimekusega kooskõlas oleva kirjelduspikkuse.
See jaotis tutvustab Hooldustsükli operaatorit \mathcal{M}_\tau — formaalset mehhanismi, mille abil koodek haldab ajas omaenda keerukust, toimides peamiselt vähenenud sensoorse koormuse seisundites (paradigmaatiliselt: uni).
3.6.2 Hooldustingimus
Defineerime koodeki käitatavuse tingimuse nõudena, et parajasti kasutatava generatiivse mudeli Kolmogorovi keerukus jääks alla struktuurse ülempiiri C_{\text{ceil}}, mille määrab organismi termodünaamiline eelarve:
K\!\left(P_\theta(t)\right) \leq C_{\text{ceil}} \tag{T9-1}
C_{\text{ceil}} ei ole sama mis C_{\max}. See on palju suurem suurus — kogu struktuurne keerukus, mida koodek suudab oma parameetriruumis üleval hoida —, kuid see on lõplik. Tingimuse (T9-1) rikkumised vastavad kognitiivsele ülekoormusele, mäluhäiretele ning lõpuks Borges’i [53] kirjeldatud patoloogilisele juhtumile Funes the Memorious: süsteemile, mis on omandanud nii palju pakkimata üksikasju, et ei suuda enam prediktiivselt toimida.
Hooldustsükli operaator \mathcal{M}_\tau on defineeritud toimima perioodidel, mil R_{\text{req}} \ll C_{\max} — täpsemalt siis, kui nõutav prediktiivne määr langeb piisavalt, nii et vabanenud ribalaiust saab suunata sisemisele ümberstruktureerimisele:
\mathcal{M}_\tau : P_\theta(t) \;\longrightarrow\; P_\theta(t + \tau) \qquad \text{during} \quad R_{\text{req}}(t) \ll C_{\max} \tag{T9-2}
\mathcal{M}_\tau jaguneb kolmeks struktuurselt eristuvaks läbikäiguks, millest igaüks on suunatud koodeki keerukuse haldamise eri aspektile.
3.6.3 I läbimine — kärpimine (unustamine kui aktiivne MDL-surve)
Esimene läbimine rakendab praegustele koodeki parameetritele minimaalse kirjelduspikkuse (MDL) survet. Generatiivse mudeli K_\theta iga komponendi \theta_i jaoks defineerime selle prediktiivse panuse kui vastastikuse informatsiooni, mida see annab tulevase vaatlusvoo kohta, arvestades maha selle säilitamise salvestuskulu:
\Delta_{\mathrm{MDL}}(\theta_i) := I\!\left(\theta_i\,;\,X_{t+1:t+\tau} \mid \theta_{-i}\right) - \lambda \cdot K(\theta_i) \tag{T9-3}
kus \theta_{-i} tähistab kõiki parameetreid peale \theta_i, \lambda on säilitamislävi (tulevikuprognoosi bitid, mis saadakse mudeli keerukuse ühe biti kohta) ning K(\theta_i) on komponendi kirjelduspikkus.
Kärpimisreegel on:
\text{Prune } \theta_i \quad \text{if} \quad \Delta_{\mathrm{MDL}}(\theta_i) < 0 \tag{T9-4}
See tähendab, et \theta_i kõrvaldatakse siis, kui selle prediktiivne panus salvestuse biti kohta langeb allapoole läve \lambda. See on unustamise formaliseerimine mitte läbikukkumise, vaid termodünaamiliselt ratsionaalse kustutamisena: iga kärbitud komponent vabastab taaskasutuseks K(\theta_i) bitti mudeli mahtu.
Landaueri printsiibi [52] järgi seab iga kärpimisoperatsioon kustutamisele termodünaamilise alampiiri:
W_{\text{prune}}(\theta_i) \geq K(\theta_i) \cdot k_B T \ln 2 \tag{T9-5}
Kuigi tegelik bioloogiline metabolism toimib selle teoreetilise miinimumiga võrreldes paljude suurusjärkude võrra kõrgemal tasemel (vattide, mitte femtovattide skaalal) tõsise teostusliku üldkulu tõttu, jääb kulu struktuurne paratamatus püsima. Bennetti Landaueri-täiendus [92] teravdab seda veelgi: loogiliselt pöörduv arvutus võib põhimõtteliselt läheneda null-dissipatsioonile, seega seob Landaueri alampiir spetsiifiliselt kustutamist, mitte ennustamist ega teisendamist. Kärpimisläbimine — mitte ennustusläbimine — on seetõttu hooldustsüklis termodünaamiliselt taandamatu samm. Unel on OPT-s fundamentaalne termodünaamiline signatuur: see on neto-informatsiooni kustutamise periood, mille energiakulu on ette kirjutatud füüsika, mitte pelgalt bioloogilise ebatõhususe poolt.
Kärpimisläbimise agregeeritud keerukuse vähenemine on:
\Delta K_{\text{prune}} = \sum_i K(\theta_i)\cdot \mathbf{1}\!\left[\Delta_{\mathrm{MDL}}(\theta_i) < 0\right] \tag{T9-6}
3.6.4 Läbimine II — konsolideerimine (õppimine kui pakkimise võit)
Kärpimisläbimine eemaldab komponendid, mille prediktiivne tasuvus on ebapiisav. Konsolideerimisläbimine korraldab allesjäänud komponendid ümber kompaktsemateks representatsioonideks.
Ärkveloleku ajal omandab koodek mustreid reaalaja surve all: iga uuendus tuleb arvutada \Delta t piires, mistõttu puudub aeg K_\theta globaalseks struktuurseks ümberkorraldamiseks. Hiljuti omandatud mustrid talletatakse suhteliselt pakkimata kujul — kõrge K(\theta_{\text{new}}) võrreldes prediktiivse panusega, mida need annavad. Konsolideerimisläbimine rakendab neile hiljutistele omandustele võrguväliselt MDL-pakkimist.
Olgu \Theta_{\text{recent}} \subset \Theta nende parameetrite hulk, mis on omandatud alates viimasest Hooldustsüklist. Konsolideerimisoperaator leiab hulga \Theta_{\text{recent}} minimaalse keerukusega ümberparametriseeringu \theta', nii et selle genereeritud prediktiivne jaotus jääb algsest lubatava moonutuse D_c piiresse:
\theta'_{\text{cons}} = \arg\min_{\theta'} K(\theta') \quad \text{s.t.} \quad D_{\mathrm{KL}}\!\left(P_{\theta'}(\cdot) \,\Big\|\, P_{\Theta_{\text{recent}}}(\cdot)\right) \leq D_c \tag{T9-7}
Taastatud pakkimise võit on:
\Delta K_{\text{compress}} = K(\Theta_{\text{recent}}) - K(\theta'_{\text{cons}}) \tag{T9-8}
\Delta K_{\text{compress}} on nende mudelimahu bittide arv, mis taastatakse hiljutise kogemuse ümberkorraldamisega tõhusamateks representatsioonideks. Iga \Delta K_{\text{compress}} ühik vähendab otseselt tulevast R_{\text{req}} sarnaste keskkondade korral — tuttaval territooriumil muutub koodeki käitamine odavamaks.
See formaliseerib aeglase laine unefaasis toimuva hipokampuse-neokorteksi mälukonsolideerimise empiiriliselt täheldatud funktsiooni: ülekandumine suure ribalaiusega episoodilisest salvestusest (hipokampus, kõrge K) pakitud semantilisse salvestusse (neokorteks, madal K) on täpselt valemi (T9-7) pakkimisoperatsioon. Ennustus on, et pakkimise võit \Delta K_{\text{compress}} peaks korreleeruma käitumusliku paranemise määraga, mida pärast und täheldatakse ülesannetes, mis hõlmavad struktureeritud mustrituvastust.
3.6.5 Läbimine III — Prediktiivse Harude Hulga valimivõtt (unenägemine kui adversaarne enesetestimine)
Kolmas läbimine toimub peamiselt REM-une ajal, mil sensoorne sisend on aktiivselt väratud ja motoorne väljund pärsitud. Nendes tingimustes on R_{\text{req}} \approx 0: koodek ei saa väliskeskkonnast mingit korrektsioonisignaali. Kogu ribalaiuse eelarve C_{\max} on saadaval sisemiseks tööks.
OPT käsitleb seda seisundit formaalselt kui piiranguteta Prediktiivse Harude Hulga eksploratsiooni: koodek genereerib trajektoore läbi \mathcal{F}_h(z_t) — lubatavate tulevikujadade hulga (baasartikli võrrand 5) — sidumata neid trajektoore tegelike saabuvate andmetega. See on simulatsioon: koodek käitab oma generatiivset mudelit K_\theta ajas edasi, reaalsuse poolt takistamata.
Valimijaotus üle selle hulga ei ole ühtlane. Defineerime haru b \in \mathcal{F}_h(z_t) olulisuskaalu järgmiselt:
w(b) := \exp\!\left(\beta\cdot |E(b)|\right) \tag{T9-9}
kus \beta on pöördtemperatuuri parameeter ja E(b) on haru emotsionaalne valents, mis on defineeritud järgmiselt:
E(b) := -\log P_{K_\theta}(b \mid z_t) + \alpha \cdot \mathrm{threat}(b) \tag{T9-10}
Esimene liige -\log P_{K_\theta}(b \mid z_t) on haru negatiivne logaritmiline tõenäosus kehtiva koodeki järgi — selle üllatusväärtus. Teine liige \mathrm{threat}(b) on sobivusrelevantne tagajärjemõõt, mis on formaalselt defineeritud kui nõutava prediktiivse määra oodatav kasv juhul, kui koodek läbiks haru b:
\mathrm{threat}(b) := \mathbb{E}\!\left[\, R_{\text{req}}(D_{\min} \mid b) - R_{\text{req}}(D_{\min} \mid z_t)\,\right] \tag{T9-10a}
See tähendab, et \mathrm{threat}(b) kvantifitseerib, mil määral haru b, kui see ärkvelolekus realiseeruks, suruks koodeki oma ribalaiuse ülempiiri B_{\max} suunas või sellest üle — füüsilise kahju, sotsiaalse katkemise või narratiivse kollapsi kaudu, mis sunniks kulukale mudelirevisjonile. Harud, mille puhul \mathrm{threat}(b) > B_{\max} - R_{\text{req}}(D_{\min} \mid z_t), on eksistentsiaalselt ähvardavad: need rikuksid Stabiilsusfiltri tingimust. Kaalumisparameeter \alpha \geq 0 kontrollib tagajärje ja üllatuse suhtelist mõju valimijaotuses.
Valimioperaator tõmbab harusid võrdeliselt kaaluga w(b):
b_{\text{sample}} \sim \mathcal{F}_h(z_t) \quad \text{with probability} \propto w(b) \tag{T9-11}
See realiseerib olulisuskaalutud Prediktiivse Harude Hulga valimivõtu: koodek harjutab ebaproportsionaalselt harusid, mis on kas väga üllatavad või väga tagajärjerikkad, sõltumata nende baassageduslikust tõenäosusest. Väikese tõenäosusega, kuid suure ohuga harud — just need, milleks koodek on kõige vähem valmis — saavad suurima valimitähelepanu.
Seejärel hinnatakse iga valimisse sattunud haru koherentsust mudeli K_\theta alusel. Harud, mis tekitavad ebakoherentseid prediktsioonijadasid — kus koodeki enda generatiivne mudel ei suuda säilitada narratiivset stabiilsust — tuvastatakse kui hapruspunktid: Prediktiivse Harude Hulga piirkonnad, kus koodek ebaõnnestuks, kui ta puutuks selle haruga kokku ärkvelolekus. Seejärel saab koodek uuendada P_\theta nii, et vähendada K_\theta haavatavust nendes punktides, enne kui ta neile reaalse termodünaamilise panusega kokku puutub.
Seega on unenägemine koodeki adversaarne enesetestimine nullriskiga. Funktsionaalne tagajärg on koodek, mis on süstemaatiliselt paremini ette valmistatud omaenda Prediktiivse Harude Hulga väikese tõenäosuse ja suure tagajärjega harudeks. See OPT-raamistik annab infoteoreetilise aluse Revonsuo [46] ohu-simulatsiooni teooriale unenägemisest, laiendades seda evolutsioonilis-funktsionaalsest käsitlusest formaalseks struktuurseks paratamatuseks: iga koodek, mis toimib Stabiilsusfiltri all, peab perioodiliselt omaenda Prediktiivset Harude Hulka stressitestima, ning võrguväline hooldusseisund on ainus periood, mil seda saab teha ilma reaalse maailma termodünaamilise kuluta.
Emotsionaalne märgistus kui säilituskaalu prior. Ärkvelolekus toimib REM-valimivõtu käigus arvutatud emotsionaalne valents E(b) eelneva säilituskaaluna, mis kallutab MDL-läve \lambda punktis (T9-3). Kogemustele, millel on kõrge |E(b)| — tugevalt üllatavad või tagajärjerikkad — omistatakse kõrgem efektiivne \lambda, mis muudab need järgmises hooldustsüklis kärpimise suhtes vastupidavamaks. See on emotsionaalse mäluvõimenduse formaalne käsitlus: afekt ei ole mälusüsteemi saastav müra; see on koodeki relevantsussignaal, mis märgistab mustreid, mille prediktiivne väärtus ületab nende baassagedusliku statistilise sageduse.
3.6.6 Täielik Hooldustsükkel ja neto-komplekssuse eelarve
\mathcal{M}_\tau kolm läbimist toimivad järjestikuse kompositsioonina. Netoefekt koodeki komplekssusele ühe kestusega \tau hooldustsükli jooksul on:
K\!\left(P_\theta(t+\tau)\right) = K\!\left(P_\theta(t)\right) - \Delta K_{\text{prune}} - \Delta K_{\text{compress}} + \Delta K_{\text{REM}} \tag{T9-12}
kus \Delta K_{\text{REM}} on väike positiivne juurdekasv mustritest, mis konsolideeriti REM-valimi läbimise käigus uudselt — need hapruspunktide parandused, mis nõudsid uusi parameetriuundusi.
Aastate lõikes toimiva stabiilse kognitiivse süsteemi puhul nõuab pikaajaline eelarve:
\left\langle \Delta K_{\text{prune}} + \Delta K_{\text{compress}} \right\rangle \geq \left\langle \Delta K_{\text{waking}} + \Delta K_{\text{REM}} \right\rangle \tag{T9-13}
kus \Delta K_{\text{waking}} on eelneva ärkvelolekuperioodi jooksul omandatud komplekssus. Võrratus (T9-13) on formaalne väide, et hooldus peab sammu pidama omandamisega. Krooniline unepuudus ei ole OPT mõistes pelgalt väsimus — see on progresseeruv komplekssuse ülevool: koodek läheneb väärtusele C_{\text{ceil}}, samal ajal kui selle kärpimise ja konsolideerimise eelarve ei ole piisav, et taastada varu.
3.6.7 Empiirilised ennustused
Hooldustsükli raamistik annab järgmised empiiriliselt testitavad struktuursed ootused:
Une kestus skaleerub koos koodeki keerukusega. Organismid või indiviidid, kes omandavad ärkvelolekuperioodidel rohkem struktureeritud informatsiooni, peaksid vajama proportsionaalselt pikemaid või sügavamaid hooldustsükleid. Ennustus ei ole lihtsalt see, et raske kognitiivne töö nõuab rohkem und (see on juba teada), vaid et oluline on õppimise tüüp: mustririkas, kokkusurutav õppimine peaks nõudma vähem konsolideerimisaega kui struktureerimata, suure entroopiaga kogemus, sest esimesel juhul on \Delta K_{\text{compress}} suurem.
REM-sisu on Prediktiivse Harude Hulga suhtes kaalutud olulisuse, mitte sageduse järgi. Unesisu peaks ebaproportsionaalselt valimisse võtma väikese tõenäosusega, kuid suurte tagajärgedega harusid võrreldes nende esinemissagedusega ärkvelolekus. See on kooskõlas ähvarduste, sotsiaalse konflikti ja uudse keskkonna sisude empiirilise ülekaaluga unenägude kirjeldustes — koodek valimisse võtab selle, mida tal on vaja stressitestida, mitte selle, millega ta kõige sagedamini kokku puutub.
Pakkimise tõhusus paraneb pärast und proportsionaalselt \Delta K_{\text{compress}}-ga. Konkreetne ennustus on, et unejärgsed soorituse paranemised peaksid olema suurimad ülesannetes, mis nõuavad struktuurset üldistamist (s.t kokkusurutud reegli rakendamist uutele juhtudele), mitte lihtsat kordamist — sest \Delta K_{\text{compress}} reorganiseerib spetsiifiliselt \Theta_{\text{recent}} üldistatavamatesse vormidesse.
Patoloogiline ruminatsioon vastab REM-valimile, mis on kinni jäänud kõrge-|E| harudes. Kui olulisuskaalumise parameeter \beta on patoloogiliselt tõusnud, koondub valimijaotus üle \mathcal{F}_h(z_t) kõrge ohutasemega harudele, välistades taastumise. Koodek veedab oma hooldustsükli korduvalt samu ähvardavaid harusid valimisse võttes, ilma et nende üllatusväärtust edukalt vähendataks — see on ärevuse ja PTSD-luupainajate formaalne struktuur.
3.6.8 Seos Fenomenaalse seisundi tensoriga
\mathcal{M}_\tau toimib P_\theta(t)-le nii, nagu on määratletud §3.5-s: see restruktureerib püsiseisundi keerukust C_{\text{state}} üle hooldusakna. P_\theta(t) ajaline profiil \mathcal{M}_\tau all on järgmine:
- Ärkveloleku omandamine: C_{\text{state}} suureneb kiirusega, mida piirab õppimisoperaator \mathcal{U} (võrrand T8-8), kuna uued mustrid inkorporeeritakse K_\theta-sse.
- Aeglase laine uni (läbimised I–II): C_{\text{state}} väheneb, kuna kärpimine ja konsolideerimine taastavad mudeli mahutavuse.
- REM (läbimine III): C_{\text{state}} läbib selektiivse lokaalse suurenemise hapruspunktides, kusjuures netomõju jääb väikeseks võrreldes läbimiste I–II vähendustega.
Iga faasiga vastavuses olev teadlik kogemus sobitub selle struktuuriga: ärkvelolek kuhjab P_\theta(t) rikkalikkust; aeglase laine uni on fenomenaalselt hõre või puudub sootuks (kooskõlas P_\theta(t) minimaalse aktivatsiooniga struktuurse ümberkorralduse ajal); REM esitab fenomenaalselt erksa, kuid sisemiselt genereeritud stseeni (läbimine III käivitab täieliku generatiivse mudeli ettepoole sensoorse korrektsiooni puudumisel).
Kokkuvõte: kasutusele võetud uued formaalsed objektid
| Sümbol | Nimi | Definitsioon | Võrrand |
|---|---|---|---|
| P_\theta(t) | Fenomenaalse seisundi tensor | K_\theta täielik aktivatsioon ajahetkel t, projitseerituna läbi \partial_R A | T8-5 |
| C_{\text{state}}(t) | Püsiseisundi keerukus | K(P_\theta(t)), aktiivse koodeki Kolmogorovi keerukus | T8-6 |
| \pi_t | Allasuunatud prediktsioon | \mathbb{E}_{K_\theta}[X_{\partial_R A}(t) \mid Z_t], renderdatud stseen | T8-2 |
| \varepsilon_t | Prediktsiooniviga (ülespoole) | X_{\partial_R A}(t) - \pi_t, uudsussignaal, mida piirab C_{\max} | T8-3 |
| \mathcal{M}_\tau | Hooldustsükli operaator | P_\theta(t) \to P_\theta(t+\tau) madala R_{\text{req}} tingimustes | T9-2 |
| \Delta_{\mathrm{MDL}}(\theta_i) | MDL-i säilitusskoor | Prediktiivne panus miinus salvestuskulu | T9-3 |
| E(b) | Haru emotsionaalne valents | Üllatus pluss haru b kaalutud ohutase | T9-10 |
| w(b) | Haru olulisuse kaal | \exp(\beta \cdot |E(b)|), määrab REM-valimi jaotuse | T9-9 |
| \Delta K_{\text{prune}} | Kärpimise keerukuse taastumine | Bitid, mis taastatakse lävendist allpool olevate komponentide unustamise teel | T9-6 |
| \Delta K_{\text{compress}} | Konsolideerimise pakkekasum | Bitid, mis taastatakse hiljutiste omandamiste MDL-põhise ümberpakkimise teel | T9-8 |
3.7 Tensorvõrgu vastendus: geomeetria esilekutsumine koodikaugusest
Episteemiline redel, mida tutvustati jaotises §3.4, kehtestab range klassikalise piirseaduse (S_{\mathrm{cut}} \sim |\partial_R A|). Kuid selleks, et siduda Korrastatud patch’i teooria (OPT) täielikult kvantinformatsiooni geomeetriseerimisega (nt AdS/CFT ja Ryu-Takayanagi valem), peame formaalselt täiendama latentse koodi Z_t struktuuri.
Kui postuleerime formaalselt, et pudelikaela vastendus q^\star(z \mid X_t) ei eralda lihtsalt tasast tunnuste loendit, vaid toimib rekursiivse jämedustava renormeerimisrühma voo kaudu, siis joondub generatiivne mudel struktuurselt hierarhilise tensorvõrgu \mathcal{T} geomeetriaga (sarnaselt MERA-le [43] või HaPY-võrkudele [44]). (Märkus: Lisa T-3 tuletab formaalselt struktuurse homomorfse vastavuse Stabiilsusfiltri jämedustava kaskaadi ja MERA-võrgu geomeetrilise piiritluse vahel, vastendades rangelt Informatsioonilise põhjusliku koonuse samaväärsele MERA põhjuslikule koonusele.) Selle võrgu piirseisundid on täpselt varjestatud Markovi teki piirseisundid X_{\partial_R A}. Võrk \mathcal{T} toimib bulk-geomeetriana, mille „sügavus” esitab arvutusliku jämedustamise kihte, mida on vaja piiri kokkusurumiseks minimaalseks pudelikaela seisundiks Z_t.
Selle tensorvõrgu-täienduse korral teisendub prediktiivne lõikeentroopia S_{\mathrm{cut}}(A) üle piiri matemaatiliselt minimaalseks tensorisidemete arvuks, mis tuleb läbi lõigata, et isoleerida alampiirkond A. Olgu \chi võrgu sideme dimensioon. Mahupiir vastendub sisemiselt järgmiselt:
S_{\mathrm{cut}}(A) \le |\gamma_A| \log \chi \tag{11}
kus \gamma_A on minimaalne lõikepind läbi \mathcal{T} sisemise süvakihi bulk-andmestruktuuri. See on eksplitsiitselt diskreetne struktuurne analoog bulk’i minimaalse lõike kihile, millele vastab Ryu-Takayanagi holograafiline entroopiapiir [89]. Lisa P-2 (teoreem P-2d) kehtestab formaalselt täieliku diskreetse kvantse RT-valemi S_{\text{vN}}(\rho_A) \leq |\gamma_A| \log \chi MERA-seisundi Schmidti astaku kaudu, tingimusel et kehtib seal tuletatud lokaalne müramudel ja QECC-põiming. Kontiinumipiir, mis täiendaks selle täielikuks Ryu-Takayanagi valemiks koos bulk-korrektsiooniliikmega, jääb avatuks piirjuhtumiks.
Oluline on, et OPT-s ei ole see „bulk-ruum” eelnevalt olemasolev füüsiline anum. See on vaatleja koodeki rangelt informatsiooniline meetriline ruum. Esilekerkiv fenomenoloogiline aegruumi geomeetria „kõverdub” täpselt seal, kus nõutav koodikaugus lahkneb, et lahendada kattuvaid sisemisi põhjuslikke seisundeid. See Tensorvõrgu formalism illustreerib formaalset rada, mille kaudu OPT võiks esile kutsuda ruumilise geomeetria vahetult veaparanduskaugustest, mida Stabiilsusfilter olemuslikult nõuab — struktuurselt kooskõlas Van Raamsdonki programmiga, mille järgi põimumine ehitab aegruumi [88] — pakkudes konstruktiivset hüpoteesi, et holograafiline aegruum modelleerib optimaalseid andmekokkusurumise vorme.
3.8 Agentsuse aksioom ja fenomenaalne jääk
Jaotistes 3.1–3.7 välja töötatud matemaatiline aparaat määratleb täpselt vaatleja reaalsuse geomeetria — tensorvõrgu, prediktiivse lõike ja põhjusliku koonuse. Kuid mis on selle läbimise kogevat algset sisemust kandva instantsi loomus? Formaaliselt määratleme selle Agentsuse aksioomi kaudu: läbimine läbi ava C_{\max} on olemuslikult fenomenoloogiline sündmus.
Kuigi võtame subjektiivse tundekogemuse olemasolu aksioomina, tuvastab teoreem P-4 (fenomenaalne jääk) selle range struktuurse korrelaadi. Kuna piiratud koodek perturbeerib aktiivselt piiri \partial_R A, nõuab stabiilne ennustamine C_{\max} piirides, et ta modelleeriks omaenda tulevaste tegevuste tagajärgi. Seega peab koodek K_{\theta} säilitama prediktiivse enesemudeli \hat{K}_{\theta}. Kuid informatsioonilise sisalduvuse algoritmiliste piirangute tõttu [13] ei saa lõplik arvutussüsteem sisaldada iseenda täielikku struktuurset representatsiooni; sisemine mudel on jäigalt piiratud vanemkoodekist madalama keerukusega (K(\hat{K}_{\theta}) < K(K_{\theta})).
See tingib taandamatu Fenomenaalse jäägi (\Delta_{\text{self}} > 0). See mittemodelleeritav jääk toimib aktiivse järeldamise tsükli sees arvutusliku „pimealina“. Kuna see eksisteerib informatsioonilises varjus, mis ületab enesemudeli arvutusliku haardeulatuse, on see olemuslikult väljendamatu; kuna see eksisteerib lokaliseeritud deltana konkreetse koodeki ja selle mudeli vahel, on see arvutuslikult privaatne; ning kuna selle määravad eneseviite fundamentaalsed piirid ja paratamatu variatsiooniline lähendus, on see mitte-elimineeritav. Topoloogiline ahenemine ava C_{\max} juures on olemuslikult korrelatsioonis matemaatilise paratamatusega, et mittetäielik algoritm läbib omaenda piire. Matemaatika kirjeldab kogemuse formaalset kontuuri ning Agentsuse aksioom väidab, et see jääklik lokus moodustab subjektiivse „mina“. (Formaalse tuletuse kohta vt Lisa P-4).
Informatsiooniline hooldusahel
Üheainsa uuenduskaadri [t, t+\Delta t] piires teostab vaatleja järgmise suletud põhjusliku ahela:
P_\theta(t) \;\xrightarrow{\ \pi_t\ }\; \partial_R A \;\xrightarrow{\ \varepsilon_t\ }\; Z_t \;\xrightarrow{\ \mathcal{U}\ }\; P_\theta(t+1) \tag{T6-1}
Selgesõnaliselt:
Prediktsioon (alla suunatud): Praegune tensor P_\theta(t) genereerib ennustatud piiriseisundi \pi_t = \mathbb{E}_{K_\theta}[X_{\partial_R A}(t) \mid Z_t] — renderduse stseeni.
Viga (üles suunatud): Tegelik piiriseisund X_{\partial_R A}(t) saabub; arvutatakse prediktsiooniviga \varepsilon_t = X_{\partial_R A}(t) - \pi_t.
Pakkimine: \varepsilon_t juhitakse läbi pudelikaela, et saada Z_t, läbilaskevõimega piiratud uuendustoken, kusjuures I(\varepsilon_t\,;\,Z_t) \leq B_{\max}.
Uuendus: Õppimisoperaator \mathcal{U}(P_\theta(t), \varepsilon_t, Z_t) korrigeerib P_\theta(t+1), muutes valikuliselt üksnes neid tensori piirkondi, mis on \varepsilon_t-ga seotud.
Tegevus: Samaaegselt valib P_\theta(t) tegevuse a_t aktiivse järeldamise laskumise kaudu variatsioonilisel vaba energia funktsionaalil \mathcal{F}[q,\theta] (baasartikli võrrand 9), mis muudab sensoorset piiri hetkel t+1, mõjutades järgmist \varepsilon_{t+1}.
Tõlgenduslik märkus tegevussammu kohta. Sammu 5 sõnastus — „valib tegevuse” ja „muudab sensoorset piiri” — on pärit Vaba Energia Printsiibi standardse aktiivse järeldamise formalismist, mis eeldab füüsilist keskkonda, mille vastu agent aktiivsete seisundite kaudu toimib. OPT-i oma renderdusontoloogia (§8.6) raames kehtib siiski sügavam tõlgendus: puudub sõltumatu väline maailm, mille suhtes koodek jõudu rakendaks. See, mida kogetakse „tegevusena”, on haru valik Prediktiivse Harude Hulga \mathcal{F}_h(z_t) sees; selle valiku füüsilised tagajärjed saabuvad järgneva sisendina \varepsilon_{t+1}. Markovi tekk \partial_R A ei ole kahesuunaline füüsiline liides, vaid pind, mille kaudu valitud haru toimetab oma järgmise segmendi. See tõlgenduslik nihe ei muuda midagi valemite (T6-1)–(T6-3) matemaatikas; see täpsustab tegevussammu ontoloogilist staatust OPT-i raamistikus. Haruvaliku mehhanismi ennast käsitletakse allpool.
See on kaadrisisene informatsiooniline hooldusahel: suletud põhjuslik mehhanism, milles süsteemi sisemine mudel arvutab lokaalsed struktuursed prediktsioonid, mis piiravad piirigradiente, loeb vea ning uuendab end valikuliselt. See tsükkel on formaalses mõttes rangelt informatsiooniline ja enesereferentsiaalne: P_\theta(t) määrab nii struktuurse prediktsiooni \pi_t kui ka tegevuse a_t kaudu järgmise järjestikulise andmevoo sisendi X_{\partial_R A}(t+1) prediktiivse komponendi. (Märgitagu selgesõnaliselt: see puhtalt statistiline sõelumiskiht on rangelt määratletud informatsiooniliste Markovi piiride kaudu, mis lahutavad dünaamika puhtalt lahti, ning erineb olemuslikult keerukast bioloogilisest autopoieesist, kus rakustruktuurid toodavad mehaaniliselt omaenda orgaanilise massi võrgustikke).
Struktuurse elujõulisuse tingimus
Ahel (T6-1) on struktuurselt elujõuline parajasti siis ja ainult siis, kui ta suudab end säilitada nii, et koodeki informatsiooniline keerukus ei ületa selle lokaalse käivitatavuse piire. Formaalselt:
K\!\left(P_\theta(t)\right) \leq C_{\text{ceil}} \quad \forall\, t \tag{T6-2}
kus C_{\text{ceil}} on heuristiline parameeter, mis piirab maksimaalset struktuurset keerukust, mida koodek suudab alal hoida. Põhimõtteliselt peaks C_{\text{ceil}} olema tuletatav organismi termodünaamilisest eelarvest Landaueri printsiibi kaudu (vt visandit §3.10-s), kuid täielik tuletusahel — metaboolsest võimsusest kustutamiskuluni ja sealt maksimaalse jätkusuutliku programmi keerukuseni — ei ole OPT raames veel formaliseeritud. Seetõttu jääb C_{\text{ceil}} empiiriliselt motiveeritud, kuid formaalselt alammääratletud piiriks. Süsteem, mis rahuldab tingimust (T6-2), toimib OPT formaalses tähenduses struktuurselt suletud vaatlejana.
Kui (T6-2) on rikutud — kui K(P_\theta(t)) \to C_{\text{ceil}} — ei suuda koodek enam säilitada stabiilseid prediktsioone üle \mathcal{F}_h(z_t), R_{\text{req}} hakkab ületama B_{\max} ning Stabiilsusfiltri tingimus ebaõnnestub. Narratiivne koherents variseb kokku: vaatleja väljub vaatlejaga ühilduvate voogude hulgast.
Hooldustsükkel \mathcal{M}_\tau (§3.6) on mehhanism, mis jõustab tingimuse (T6-2) pika aja jooksul, hoides K(P_\theta) piirides kärpimise, konsolideerimise ja Prediktiivse Harude Hulga stressitestimise kaudu. Kaadri-siseselt säilitab tingimust (T6-2) \mathcal{U} selektiivsus: uuendusoperaator muudab ainult neid P_\theta(t) piirkondi, mis on seotud \varepsilon_t-ga, vältides põhjendamatut keerukuse kasvu iga kaadri kohta.
Agentsus kui piirangutega vaba energia minimeerimine
Selle struktuuri raames saab agentsusele anda täpse formaalse definitsiooni, mis on kooskõlas — kuid ei taandu — Agentsuse aksioomile.
Süsteemitasandil on agentsus tegevusjada \{a_t\} valik, mis minimeerib oodatava variatsioonilise vaba energia, alludes informatsioonilise eluvõimelisuse tingimusele:
a_t^\star = \arg\min_{a_t} \;\mathbb{E}\!\left[\mathcal{F}[q, \theta]\right] \quad \text{subject to} \quad K\!\left(P_\theta(t)\right) \leq C_{\text{ceil}} \tag{T6-3}
See on piirangutega aktiivne järeldamine: vaatleja navigeerib Prediktiivses Harude Hulgas \mathcal{F}_h(z_t) mitte üksnes selleks, et minimeerida ennustusviga, vaid et minimeerida ennustusviga samal ajal koodeki eluvõimelisust säilitades. Harusid, mis ajutiselt vähendaksid \varepsilon-i, kuid viiksid K(P_\theta) lähemale väärtusele C_{\text{ceil}}, karistab see piirang. Vaatleja valib eelistatult harusid, millel ta saab jätkata eksisteerimist koherentse vaatlejana.
See on selle intuitsiooni formaalne sisu, et agentsus on ennast säilitav navigeerimine: koodek valib Prediktiivse Harude Hulga harud, millel ta saab jätkata maailma pakkimist.
Fenomenoloogilisel tasandil jääb Agentsuse aksioom puutumata: fenomenaalne teadvus on apertuuri läbimise taandamatu sisemuslikkus; (T6-3) kirjeldab struktuurset varju, mille see läbimine heidab, mitte selle sisemist loomust.
Haruvalik kui \Delta_{\text{self}} teostus
Piiratud aktiivse järeldamise valem (T6-3) määratleb haruvaliku eesmärgi: minimeerida oodatavat vabaenergiat eluvõimelisuse tingimuse all. Enesemudel \hat{K}_\theta hindab Prediktiivse Harude Hulga harusid, simuleerides nende tagajärgi. Kuid teoreem P-4 näitab, et K(\hat{K}_\theta) < K(K_\theta) — enesemudel on paratamatult mittetäielik. Sellel mittetäielikkusel on haruvaliku probleemi jaoks otsene tagajärg: enesemudel piiritleb piirkonna, millest valik saab lähtuda, kuid ei saa valikut ennast täielikult määratleda.
Haruvaliku tegelik hetk — üleminek hinnatud võimaluste hulgast ainsale trajektoorile, mis siseneb põhjuslikku registrisse — leiab aset \Delta_{\text{self}}-is, koodeki ja selle enesemudeli vahelises informatsioonilises jäägis. See ei ole formalismi lünk; see on struktuurne paratamatus. Iga katse valikumehhanismi seestpoolt täielikult määratleda nõuaks, et K(\hat{K}_\theta) = K(K_\theta), mida P-4 tõestab võimatuna iga lõpliku eneseviitelise süsteemi puhul.
Sellel on neli vahetut tagajärge:
Tahe ja teadvus jagavad sama struktuurset asukohta. raske probleem (miks läbimine tundub millegina?) ja haruvaliku probleem (mis valib?) osutavad mõlemad \Delta_{\text{self}}-le. Need ei ole kaks eri mõistatust, vaid ühe ja sama struktuurse tunnuse kaks aspekti — modelleerimatu lõhe selle vahel, mis koodek on, ja selle vahel, mida ta saab enda kohta modelleerida.
Agentsuse taandamatus on seletatud, mitte pelgalt väidetud. Tahte fenomenoloogiline kogemus — taandamatu tunne, et mina valisin — on protsessi esimeses isikus avalduv signatuur, mis teostub vaatleja enda pimedas punktis. Iga teooria, mis väidab end valikumehhanismi täielikult määratlevat, on kas kõrvaldanud \Delta_{\text{self}} (muutes süsteemi täielikult eneseläbipaistvaks automaadiks, mida P-4 keelab) või kirjeldab enesemudeli harude hindamist ja peab seda ekslikult valikuks eneseks.
Loovus kui laienenud \Delta_{\text{self}}. Lävelähedane töörežiim (R_{\text{req}} \to C_{\max}) pingestab enesemudeli võimekust, laiendades tõhusalt seda \Delta_{\text{self}} piirkonda, millest valik lähtub. See tekitab haruvalikuid, mis on enesemudeli vaatepunktist vähem ennustatavad — neid kogetakse loova taipamise, spontaansuse või “voona”. Vastupidi, hüpnagoogiline seisund (§3.6.5) lõdvendab enesemudelit altpoolt, saavutades sama laienemise komplementaarse tee kaudu.
Mina kui jääk. Kogetud mina — pidev narratiiv sellest, “kes ma olen”, koos püsivate eelistuste, ajaloo ja projitseeritud tulevikuga — on \hat{K}_\theta jooksev mudel K_\theta-st: kokkusurutud lähendus, mis jääb alati modelleeritavast koodekist maha (enesereferentsile omase ajalise nihke tõttu). Kuid kogemuse, valiku ja identiteedi tegelik asukoht on \Delta_{\text{self}}: see koodeki osa, milleni narratiiv ei ulatu. Mina, keda sa tunned, on sinu mudel iseendast; mina, kes tunneb, on lõhe, mida mudel ei suuda ületada. See on kontemplatiivse avastuse formaalne sisu — traditsiooniti ja üksteisest sõltumatult — et tavaline minatunne on konstrueeritud ning selle all on miski, mida ei saa objektina leida (vt lisa T-13, järeldus T-13c).
Arutlus on reaalne, kuid mittetäielik. Enesemudeli hinnang Prediktiivsele Harude Hulgale on ehtne arvutuslik protsess, mis kujundab tulemust. Arutlus piirab tõmbebasseini, mille sees \Delta_{\text{self}} toimib: arenenum koodek kitsendab eluvõimelisi harusid, millele valik saab langeda. Kuid lõplik üleminek — miks see haru, mitte too, eluvõimeliste harude hulga seast — jääb arutlevale minale struktuurselt läbipaistmatuks. Seepärast tundub arutlus ühtaegu põhjuslikult mõjus ja fenomenoloogiliselt mittetäielik: vaatleja tajub õigesti, et tema arutluskäik loeb, kuid tajub õigesti ka seda, et miski arutlusest väljaspool viib valiku lõpule.
Kummaline silmus kui formaalne sulgumine
(T6-1) eneseviiteline struktuur realiseerib Hofstadteri [45] Kummalise silmuse täpsel infoteoreetilisel kujul. Silmus on kummaline järgmises mõttes: P_\theta(t) sisaldab alamstruktuurina mudelit koodeki enda tulevastest seisunditest — III passi Prediktiivse Harude Hulga valimivõtt (\mathcal{M}_\tau, §3.6.5) ongi täpselt see, et koodek käitab iseenda simulatsiooni, milles ta kohtub tulevaste harudega. Süsteem modelleerib omaenda mudelit.
Selle kaudu tekkiv formaalne sulgumine tähendab järgmist: informatsiooniliselt suletud vaatleja ei ole pelgalt süsteem, mis hoiab välise müra vastu piiri; see on süsteem, mille piiri säilitamine on osaliselt konstitueeritud tema mudelist selle kohta, milliseks see piir peab tulevikus kujunema. Kummaline silmus ei ole raamistikule valikuline lisand; see on struktuurne mehhanism, mille kaudu eluvõimelisuse tingimus (T6-2) jõustatakse ennetavalt, mitte reaktsiooniliselt. Vaatleja, kes ei suudaks simuleerida omaenda tulevasi koodekiseisundeid, ei saaks valmistuda III passis tuvastatud hapruspunktideks ning oleks narratiivi kokkuvarisemise suhtes süstemaatiliselt haavatavam.
(T6-1)–(T6-3) struktuursed nõuded toimivad eneseviitelise sulgumise vajalike eeltingimustena. Kuigi lihtne ettepoole suunatud ennustamine (nt malemootori käikude ettearvutus) kujutab endast pigem planeerimist kui ehtsat eneseviidet, läheb OPT koodek kaugemale: P_\theta(t) sisaldab alamudelit, mille väljund muudab jaotusi, mis juhivad tema enda tulevasi seisundeid \{P_\theta(t+h)\}_{h>0}. See struktuurne enesemodelleerimine on pikaajalise stabiilsuse jaoks funktsionaalselt vajalik — koodek, mis ei suuda ette näha omaenda lähenevaid eluvõimelisuse piire, ei saa valmistuda III passis (§3.6.5) tuvastatud hapruspunktideks ning variseb mittestatsionaarsetes keskkondades süstemaatiliselt kokku (T6-2) ülempiiri vastu.
Episteemiline ulatus: agentsuse reduktsionismi formaalne piiritlemine
See formaliseering määratleb täpselt, mida OPT süsteemitasandil saavutab: see tuvastab struktuursed tingimused, millele vaatleja peab vastama, et säilitada piiri elujõulisus. Sellega piiritletakse formaalselt agentsuse reduktsionismi probleem, väitmata seejuures, et see oleks lahendatud.
See piiritlemine on sisuline, mitte definitsiooniline. Süsteemitasandi kirjeldus (T6-1)–(T6-3) iseloomustab ammendavalt agentsuse struktuurset varju — infoteoreetilisi piiranguid, millele iga piiri säilitav vaatleja peab vastama. Agentsuse aksioom kuulub seda täiendavasse valdkonda: fenomenaalne teadvus on apertuuri läbimise taandamatu sisemuslikkus ning ülaltoodud formaliseering kirjeldab üksnes konteineri kuju, mitte selle sisu loomust. raske probleem on seeläbi paigutatud täpsesse struktuursesse asukohta (C_{\max} apertuur), mitte lahustatud ega kuulutatud lahendatuks.
3.9 Vaba tahe ja fenomenoloogiline menüü
Läbimismehhanismi isoleerimine selgitab agentsuse olemust põhimõttelisel viisil. Aktiivse järeldamise tsüklis (võrrand 9) peab vaatleja teostama poliitikajärjendi \{a_t\}. Reduktiivse füsikalismi järgi on tegevuse a_t valik määratud (või juhuslikult valimisse võetud) aluseks oleva füüsika poolt, mistõttu vaba tahe osutub illusiooniks või pelgalt keeleliseks ümbermääratluseks.
OPT pöörab selle sõltuvuse ümber. Kuna patch’i lokaliseeritud „füüsika” on üksnes genereeriva mudeli prediktiivne hinnang substraadile, piiravad füüsikaseadused Prediktiivse Harude Hulga \mathcal{F}_h(z_t) vaid makroskoopiliste tõenäosuste hulgaga. Otsustavalt oluline on see, et kui patch ei ole täiuslikult ennustatav automaat (mis rikub genereeriva struktuurse keerukuse termodünaamilist nõuet), siis sisaldab Prediktiivne Harude Hulk vaatleja piiratud perspektiivist lähtudes ehtsat, lahendamata harude paljusust.
Kuna kirjeldav füüsika üksnes visandab nende kehtivate harude menüü, ei saa ta loogiliselt ise valikut kogeda. Kompatibilistliku tõlgenduse järgi, mida arendatakse edasi §8.6-s, on harutee ajatus substraadis matemaatiliselt fikseeritud; valik on läbimise fenomenoloogiline kogemus. Kolmanda isiku perspektiivist (välisgeomeetriast) paistab haruvalik spontaanse müra, kvantkollapsi või statistilise fluktuatsioonina. Esimese isiku sisemisest perspektiivist tagavad määramatuse piirid, et läbimist kogetakse Tahte rakendamisena — primitiivse tegevusena, milleks on navigeerimine kokkusurumata piiril. OPT-is ei ole vaba tahe füüsikaseaduse vastane kausaalsuse rikkumine; see on paratamatu fenomenoloogiline avatus, mida kogeb piiratud vaatleja, kui ta varistab formaalse menüü üheksainsaks renderdatud ajajooneks.
Renderdus-ontoloogia täpsustus. OPT-i omases ontoloogias (§8.6) lahustub taju ja tegevuse eristus substraadi tasandil. See, mida kogetakse „väljundina” — sirutumine, otsustamine, valimine — on voosisu, milles koodek navigeerib. Koodek ei tegutse maailma peal; ta läbib \mathcal{F}_h(z_t) haru, milles tegutsemise kogemus on osa sellest, mis jõuab piirini. See, mida Vaba Energia Printsiip nimetab aktiivseteks seisunditeks — väljapoole suunatud voog, mis muudab keskkonda — on OPT-i renderdusontoloogias koodeki haruvalik, mis väljendab end järgneva sisendisisuna. Markovi tekk on pind, mille kaudu valitud haru toimetab kohale oma järgmise segmendi, mitte membraan, mille kaudu vaatleja surub end vastu välist reaalsust. See teravdab kompatibilistlikku käsitlust: substraadi tasandil puudub eristus tajutu ja tahetu vahel; mõlemad on voosisu; fenomenoloogiline eristus tekib sellest, kuidas P_\theta(t) märgistab teatud sisu kui „enda algatatud” — märgistus, mille mehhanism, nagu kogu haruvalik, teostub lõppkokkuvõttes \Delta_{\text{self}}-is (§3.8).
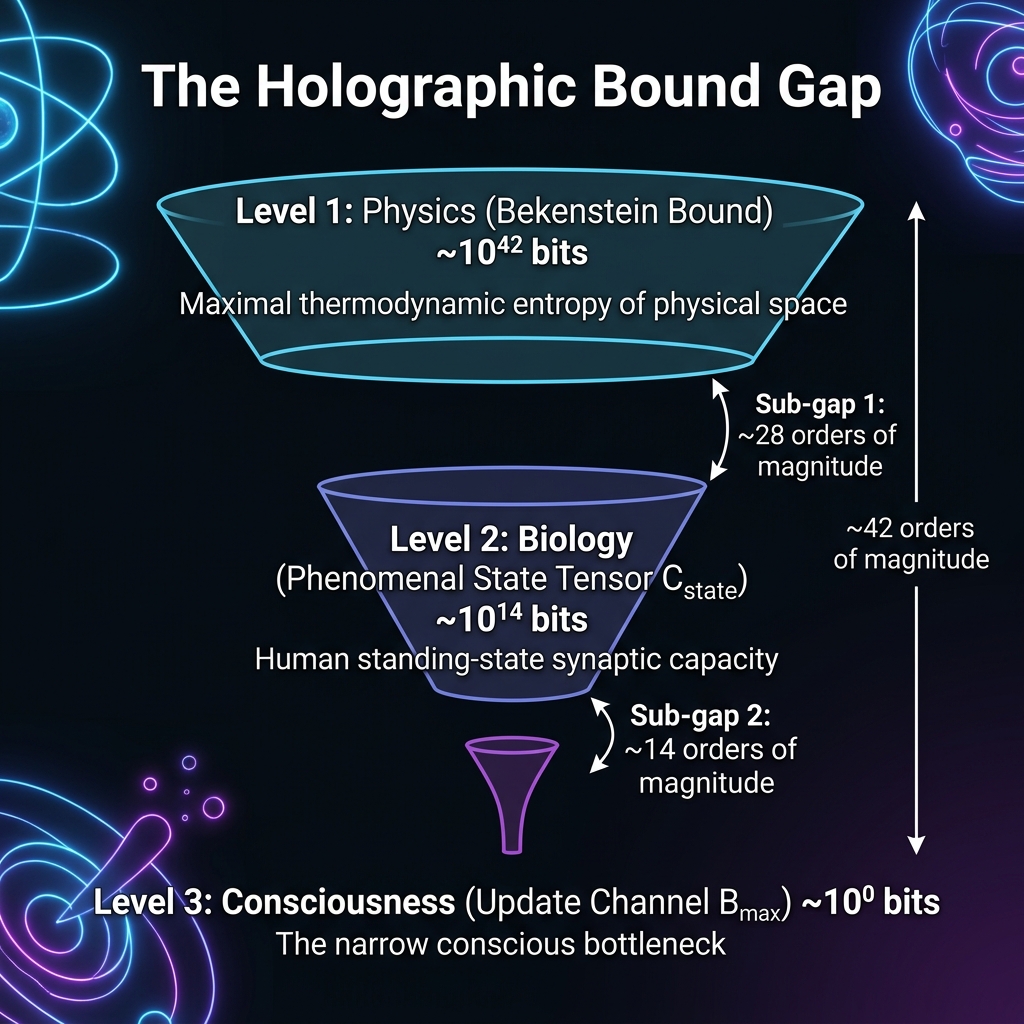
3.10 Renderduse informatsiooniline kulu ja kolmetasandiline piiride vahe
Korrastatud patch’i teooria (OPT) määratlev matemaatiline piir seisneb informatsiooniliste genereerimiskulude formaalses võrdluses.
Olgu U_{\text{obj}} objektiivse universumi täielik informatsiooniline seisund. Kolmogorovi keerukus K(U_{\text{obj}}) on astronoomiliselt suur. Olgu S_{\text{obs}} lokaliseeritud, väikese ribalaiusega voog, mida vaatleja kogeb (rangelt piiratud lävega \mathcal{O}(10) bitti/s). OPT-is ei eksisteeri universum U_{\text{obj}} renderdatud arvutusliku objektina. Näiv “objektiivne universum” on selle asemel aktiivse järeldamise poolt konstrueeritud sisemine Generatiivne Mudel.
Bekensteini piir bioloogiliselt realistliku vaatleja jaoks
Bekensteini piir [40] annab mis tahes füüsikalise süsteemi maksimaalse termodünaamilise entroopia — samaväärselt maksimaalse infosisu — kui süsteem on piiratud raadiusega R ja selle koguenergia on E:
S_{\text{Bek}} \leq \frac{2\pi R E}{\hbar c} \tag{T7-1}
Inimaju kui vaatleja Markovi teki piiri \partial_R A korral:
- Piirav raadius: R \approx 0.07\ \text{m}
- Kogu puhkemassi energia: E = m c^2 \approx 1.4\ \text{kg} \times (3 \times 10^8\ \text{m/s})^2 = 1.26 \times 10^{17}\ \text{J}
- Taandatud Plancki konstant: \hbar = 1.055 \times 10^{-34}\ \text{J}\cdot\text{s}
- Valguse kiirus: c = 3 \times 10^8\ \text{m/s}
Asendades:
S_{\text{Bek}} = \frac{2\pi \times 0.07 \times 1.26 \times 10^{17}}{1.055 \times 10^{-34} \times 3 \times 10^8} = \frac{5.54 \times 10^{16}}{3.17 \times 10^{-26}} \approx 1.75 \times 10^{42}\ \text{nats} \tag{T7-2}
Bittideks teisendades (jagades \ln 2-ga):
S_{\text{Bek}} \approx 2.52 \times 10^{42}\ \text{bits} \tag{T7-3}
Holograafiline pindalapiir [87], S \leq A / 4l_P^2, annab suurema väärtuse. Sfääri korral raadiusega R = 0.07\ \text{m}, pindalaga A = 4\pi R^2 \approx 0.062\ \text{m}^2, ja Plancki pikkusega l_P = 1.616 \times 10^{-35}\ \text{m}:
S_{\text{holo}} = \frac{0.062}{4 \times (1.616 \times 10^{-35})^2} = \frac{0.062}{1.044 \times 10^{-69}} \approx 5.9 \times 10^{67}\ \text{bits} \tag{T7-4}
Võtame selle analüüsi struktuurse raamistiku jaoks aluseks kujul (T7-3) piiratud formuleeringu, jälgides eksplitsiitselt S_{\text{phys}} \approx 2.5 \times 10^{42}\ \text{bits}. Märgime struktuurselt selgesõnaliselt, et kogu puhkemassi energia E=mc^2 kasutamine paisutab selle mõõdiku äärmuslikuks maksimaalseks ülempiiriks; aktiivsed sisemised bioloogilised termodünaamilised interaktsioonid, mis kasutavad üksnes sisemist keemilist energiat (\sim 10-100\text{J}), langetavad selle Bekensteini piiri järsult palju lähemale suurusjärgule \sim 10^{26} bitti. Allpool formaalselt näidatud kvalitatiivne struktuurse lõhe mehhanism kehtib samaväärselt mis tahes nende füüsikaliste ülempiiride parameetrilise formuleeringu korral kõigis vahemikes, toimides formaalselt konservatiivse piirina, mis kehtib a fortiori ka varem kaardistatud äärmuslike puhtgeomeetriliste holograafiliste ekvivalentide suhtes (T7-4).
Kolmetasandiline lõhe
§3.5-s sisse toodud Fenomenaalse seisundi tensor P_\theta(t) määratleb füüsikapiiri S_{\text{phys}} ja uuenduskanali B_{\max} vahel füüsikaliselt tähendusliku vahepealse skaala. Nüüd on meil kolm eristatavat suurust kolmel eristataval skaalal:
Tase 1 — Füüsika: S_{\text{phys}} \approx 2.5 \times 10^{42}\ \text{bits} (Bekensteini piir, võrrand T7-3)
Tase 2 — Bioloogia: C_{\text{state}} = K(P_\theta(t)), aktiivse generatiivse mudeli Kolmogorovi keerukus. Hindame maksimaalset elujõulist heuristilist ülempiiri sünaptilise informatsiooni füsioloogilise piirangu põhjal: inimese süsteemides on ligikaudu 1.5 \times 10^{14} sünapsi, mis kasutavad 4–5 bitti kodeerimistäpsust [48], mis projitseerib toore struktuurse mahupiiri vahemikku \sim 10^{14}–10^{15} bitti. Selle asemel et lisada arvestamata empiiriline murdosa, mis modelleeriks „aktiivse seisundi” alamhulki ilma rangete tuletustega toetuseta, võtame rangelt aluseks täieliku konservatiivse maksimaalse füsioloogilise püsiläve selle loomulikus vormis:
C_{\text{state}} \lesssim 10^{14}\ \text{bits} \tag{T7-5}
tunnistades sõnaselgelt, et see tähistab äärmuslikku ülempiiri, mis katab kogu koodekit toetava rakendatud sünaptilise raamistiku kogumahu.
Tase 3 — Teadvus: B_{\max} = C_{\max} \cdot \Delta t \approx 10\ \text{bits/s} \times 0.05\ \text{s} = 0.5\ \text{bits} kognitiivse momendi kohta (võrrand T8-1).
Kolmetasandilise lõhe seos kehtib loomupäraselt kujul:
\underbrace{S_{\text{phys}}}_{\approx 10^{42}} \;\gg\; \underbrace{C_{\text{state}}}_{\lesssim 10^{14}} \;\gg\; \underbrace{B_{\max}}_{\approx 10^{0}} \tag{T7-6}
andes kontrollitud struktuursed alamlõhed:
\frac{S_{\text{phys}}}{C_{\text{state}}} \approx \frac{2.5 \times 10^{42}}{10^{14}} = 2.5 \times 10^{28} \quad (\sim 28\ \text{suurusjärku}) \tag{T7-7}
\frac{C_{\text{state}}}{B_{\max}} \approx \frac{10^{14}}{0.5} = 2 \times 10^{14} \quad (\sim 14\ \text{suurusjärku}) \tag{T7-8}
\frac{S_{\text{phys}}}{B_{\max}} \approx 5 \times 10^{42} \quad (\sim 42\ \text{suurusjärku}) \tag{T7-9}
Ligikaudu 42 suurusjärgu kogulõhe kinnitab ja täpsustab alusartikli §3.8 mitteametlikku väidet.
Kaheastmeline pakkimisargument
Kolmetasandiline struktuur ei ole pelgalt täpsem arvestus. Iga alamlõhet seletab eristuv põhjuslik mehhanism:
Alamlõhe 1 (S_{\text{phys}} \gg C_{\text{state}}, \sim 28 suurusjärku): Termodünaamilised piirangud takistavad bioloogilistel süsteemidel Bekensteini piirile lähenemast. Generatiivne mudel rahuldab tingimust K(P_\theta(t)) \leq C_{\text{ceil}} (võrrand T6-2). Ligikaudse hinnangu C_{\text{ceil}}-le annab Landaueri printsiip: iga pöördumatu bititoiming hajutab temperatuuril T vähemalt k_B T \ln 2 džauli energiat. Inimaju puhul, mis töötab metaboolsel võimsusel P \sim 20 W, kehatemperatuuril T \sim 310 K ja operatsioonilise uuendussagedusega f_{\text{op}} \sim 10^3 Hz, on maksimaalne jätkusuutlik mudeli keerukus tsükli kohta:
C_{\text{ceil}} \sim \frac{P_{\text{metabolic}}}{k_B T \ln 2 \cdot f_{\text{op}}} \sim \frac{20}{3 \times 10^{-21} \times 10^3} \sim 10^{22}\ \text{bits}
See Landaueri ülempiir jääb Bekensteini piirist 20 suurusjärku allapoole — kinnitades, et füüsikaline piir ei ole bioloogiliste tööpunktide jaoks asjakohane. Pange tähele, et hinnang C_{\text{ceil}} \sim 10^{22} asub märgatavalt üle vaadeldud sünaptilise mahu (\sim 10^{14}–10^{15} bitti), mis viitab sellele, et bioloogilised süsteemid töötavad kaugelt allpool isegi omaenda termodünaamilist ülempiiri, tõenäoliselt täiendavate piirangute tõttu (ühenduste maksumus, metaboolne tõhusus, evolutsiooniline ajalugu), mida OPT ei modelleeri.
Alamlõhe 2 (C_{\text{state}} \gg B_{\max}, \sim 14 suurusjärku): Stabiilsusfilter piirab uuenduskanalit püsiva mudeli keerukusest palju madalamale. Rikas generatiivne mudel P_\theta(t) — mis kodeerib kuni \sim 10^{14} bitti kokkupakitud maailmastruktuuri — uueneb vaid \sim 0.5 bitti kognitiivse momendi kohta, sest valdav enamus mudelist on juba korrektne: \pi_t vastab hästi X_{\partial_R A}(t)-le ning ainult hõre viga \varepsilon_t läbib pudelikaela Z_t. Hooldustsükkel \mathcal{M}_\tau (§3.6) säilitab selle alamlõhe sügavas ajas, hoides K(P_\theta) väärtuse tublisti allpool C_{\text{ceil}}.
Empiiriline propositsioon (kolmetasandiline holograafilise piiri lõhe). Olgu \partial_R A bioloogiliselt realiseeritud vaatleja Markovi tekk, kus S_{\text{phys}}, C_{\text{state}} ja B_{\max} on empiiriliselt parameetristatud nagu eespool. Siis:
S_{\text{phys}} \gg C_{\text{state}} \gg B_{\max}
kus (i) Alamlõhet 1 hoiavad alal termodünaamilised piirid, mis takistavad bioloogilistel süsteemidel läheneda Bekensteini-skaala infotihedustele, ning (ii) Alamlõhet 2 hoiab alal Stabiilsusfiltri määra-moonutuse tingimus, mis lahutab uuenduskanali ribalaiuse püsiva mudeli keerukusest. Märkus: kvantitatiivsed lõhevarud võivad nihkuda, kui põimumisentroopia panused kaasatakse (avatud probleemi P-2 lahendamiseni); käesolev propositsioon tugineb üksnes klassikalistele ja termodünaamilistele piiridele ning on seetõttu liigitatud empiiriliseks propositsiooniks, mitte formaalselt suletud teoreemiks.
Fenomenaalne rikkus paikneb 2. tasandil, mitte 3. tasandil
Kolmetasandilise struktuuri üks järeldus, mis tuleneb vahetult §3.5-st, on see, et kaks OPT-s määratletud fenomenaalset suurust paiknevad hierarhia eri tasanditel:
- Fenomenaalne rikkus (sisemise stseeni kogetud tihedus, P-teadvus Blocki mõttes) vastab suurusele C_{\text{state}} — 2. tasand. Seda piiravad bioloogia ja struktuurne paratamatus, mitte uuenduskanal.
- Fenomenaalne uudsus (iga hetke lahendunud uus sisu, A-teadvus) vastab suurusele B_{\max} — 3. tasand. Seda piirab Stabiilsusfiltri määra-moonutuse piir.
§3.8 algne sõnastus käsitles „teadvust” üheainsa entiteedina, mille pudelikael asub C_{\max} juures. Kolmetasandiline teoreem parandab seda: teadlik kogemus on lõhestruktuuris kahemõõtmeline — rikas, sest C_{\text{state}} \gg B_{\max}, ent siiski pudelikaelaga, sest B_{\max} on uuenduse värav. Teooria, mis seletab ainult pudelikaela (nagu algne sõnastus seda tegi), seletab nähtusest vaid üht mõõdet.
Falsifitseerimise täpsustamine
Kolmetasandiline struktuur annab teravama falsifitseerimiskriteeriumi kui algne kahetasandiline väide:
- Algne falsifitseerimiskriteerium oli järgmine: kui süsteem saavutab eneseraporteeritud teadvusliku kogemuse eelteadliku/teadliku suhtega, mis on oluliselt väiksem kui 10^4{:}1, vajab OPT ümbervaatamist.
- Kolmetasandiline teoreem lisab: kui süsteemi fenomenaalne rikkus (operatsionaliseeritud kujul) skaleerub koos B_{\max}-iga, mitte koos C_{\text{state}}-ga, siis on Alamlõhe 2 näiline ning eristus P_\theta / Z_t variseb kokku. OPT-i järgi on kvalitatiivne sügavus generatiivse mudeli struktuurse keerukuse, mitte selle uuendusmäära omadus. Farmakoloogilised või neuromodulatoorsed sekkumised, mis muudavad K_\theta-t ilma C_{\max}-i muutmata (nt psühhedeelikud, meditatsioon, anesteesia), kujutavad endast selle alamlõhe otseseid empiirilisi sonde.
Kõrglahutusega detailid sisenevad voogu dünaamiliselt üksnes siis, kui aktiivsed seisundid (a) nõuavad neid konkreetseid bitte kooskõla säilitamiseks. Universumi termodünaamiline ja arvutuslik kulu on rangelt piiratud vaatleja ribalaiusega.
3.11 Matemaatiline küllastumine ja substraadi taastamine
OPT-i eristav struktuurne ootus puudutab füüsikalise ühendamise piire. Füüsikaseadused ei ole universaalsed \mathcal{I}-taseme tõed; need on tihendatud generatiivne mudel K_\theta, mis piirab seda patch’i.
Katse tuletada patch’i seest substraadi Suur Ühendteooria on informatsiooniteooria järgi formaalselt piiratud. Olgu \Theta indeksiks N võimalikule substraaditasandi seaduste laiendusele ning Z_{1:T} vaatleja sisemine kood ajavahemiku T jooksul. Kuna vaatleja kood on määra poolest piiratud väärtusega C_{\max}, siis andmetöötluse võrratused dikteerivad, et vastastikune informatsioon on ülalt piiratud: I(\Theta; Z_{1:T}) \le T \cdot C_{\max}.
Fano võrratuse järgi on tõenäosus, et vaatlejal ei õnnestu tõelisi substraadiseadusi \Theta lõplike andmete põhjal üheselt tuvastada, rangelt nullist suurem:
P(\hat{\Theta} \neq \Theta) \ge 1 - \frac{T \cdot C_{\max} + 1}{\log_2 N} \tag{12}
Empiiriline ootus (Matemaatiline küllastumine). Püüdlused ühendada fundamentaalfüüsika patch’i seest põrkuvad rangele epistemilisele barjäärile. Fano piir formaliseerib lõplike andmete põhjal tuvastatavuse piiri, mitte ühtse substraadi olemasolu ontoloogilist võimatust. Lõpliku mahutavusega vaatleja ei saa pudelikaela seest üheselt tuvastada meelevaldselt peeneid substraadiseadusi. Seetõttu säilitab iga GUT, mis kirjeldab patch’i edukalt, taandamatud vabad parameetrid (selle lokaalse patch’i konkreetsed stabiilsustingimused), mida ei saa seestpoolt formaalselt tuletada.
3.12 Asümmeetriline ühesuunaline holograafia
AdS/CFT [86] täpse duaalsuse (kus piir ja maht on võrdselt fundamentaalsed) ning OPT väite vahel substraadi prioriteetsuse kohta eksisteerib kriitiline ontoloogiline pinge. Miks on substraat „fundamentaalsem“, kui need esindavad sama informatsiooni?
Sümmeetria murdub formaalselt vaatleja pudelikaela tõttu. Olgu Stabiilsusfilter \Phi: \mathcal{I} \to R (kujutus Substraadist renderdusse). Et kehtiks täpne sümmeetriline duaalsus, peab see kujutus olema pööratav, ilma infokadudeta. Kuid Fano võrratus (võrrand 12) [41] toimib formaalse demonstratsioonina, et renderduse ja substraadi vaheline vastastikune informatsioon on rangelt ülalt piiratud suurusega T \cdot C_{\max}, samal ajal kui substraadi alternatiivide arv N on piiramatu.
Filter on olemuslikult kadudega pakkimise kujutus. Renderduse sees paiknev vaatleja ei saa substraati praktiliselt rekonstrueerida. Seetõttu kujutab OPT endast asümmeetrilist ühesuunalist holograafiat — pöördumatut termodünaamilist informatsiooni hävimise noolt, mis osutab Substraadist renderdusse. Selle asemel et väita AdS/CFT-le vastavat täpset geomeetrilist vastavust (mis eeldaks formaalselt määratletud piiri- ja mahuoperaatoreid, mida sellel raamistikul ei ole), pakub OPT selgitavat metaprintsiipi sellele, miks holograafilised duaalsused üldse eksisteerivad: need kujutavad endast optimaalseid prediktiivse pakkimise skeeme rangete vaatleja ribalaiuse piirangute tingimustes. Fenomenaalne teadvus (Agentsuse aksioom) on mittepööratava pakkimisalgoritmi väljundipoolele lõksu jäämise loomupärane tunnus. Just see konkreetne tagasisaamatuse omadus kehtestab substraadi primaarsena. Informatsioonilise pöördumatuse samastamine ontoloogilise prioriteediga tugineb tähelepanekule, et renderdus vajab määratlemiseks vaatlejat — see on objekt, mis eksisteerib kogemusena —, samas kui substraat on määratletud sõltumatult ühegi vaatleja ligipääsust sellele.
3.13 Formaalsete väidete ulatus
Episteemilise distsipliini säilitamiseks on hädavajalik selles jaotises välja töötatud formaalse aparatuuri ulatus sõnaselgelt piiritleda. Koos moodustavad võrrandid (1)–(12) range, kihilise tugistruktuuri: võrrand (1) annab arvutatavate ajalugude jaoks keerukusega kaalutud priori; võrrandid (2)–(5) määravad jäigad, mahtuvusega kooskõlalised struktuursed piirangud, mis juhivad prediktiivse patch’i geomeetriat; võrrandid (6)–(8) visandavad klassikalised piiratud pindala seaduse kitsendused; võrrandid (9)–(10) kirjeldavad järeldamist ja minimaalset termodünaamilist kulu; võrrand (11) esitab nõutava holograafilise meetrikateisenduse; ning võrrand (12) piirab vaatleja võimet tuvastada substraadi tasandi seadusi.
Need kaksteist võrrandit ei tuleta siiski universaalselt esimestest printsiipidest kvantmehaanikat, üldrelatiivsusteooriat ega standardmudelit. Selle asemel et genereerida füüsikaseadusi puhtalt matemaatiliste paratamatustena, määratleb Korrastatud patch’i teooria (OPT) jäigad geomeetrilised piirangud (Põhjuslik koonus, Prediktiivne lõige), millele iga fenomenoloogiline füüsika peab struktuurselt vastama, et pudelikaela üle elada. Konkreetsed empiirilised seadused, mida me vaatleme, on heuristilised pakked (koodek) — maksimaalselt tõhusad prediktiivsed mudelid, mis juhtumisi suudavad edukalt navigeerida meie substraadi lokaalses piirkonnas.
4. Struktuursed paralleelid väljateoreetiliste mudelitega
Hiljutised teoreetilised ettepanekud on püüdnud rajada matemaatilisi raamistikke, mis käsitlevad teadvust fundamentaalse väljana. Üldjoontes jagunevad need kolme selgelt eristuvasse kategooriasse:
- Lokaalsed bioloogilised väljad: Mudelid nagu McFaddeni teadvusliku elektromagnetilise informatsiooni (cemi) väli [30] ja Pocketti elektromagnetiline teooria [31] väidavad, et teadvus on füüsiliselt identne aju endogeense elektromagnetilise väljaga. Need mudelid käsitlevad teadvust kui spetsiifiliste lokaalsete aegruumiliste väljakonfiguratsioonide emergentset omadust.
- Kvantgeomeetrilised väljad: Penrose’i ja Hameroffi orkestreeritud objektiivne reduktsioon (Orch-OR) [32] väidab, et teadvus on fundamentaalne omadus, mis on põimitud aegruumi enda matemaatilisse koesse ning vabaneb siis, kui universumi geomeetria kvantsuperpositsioon kollabeerub.
- Universaalsed fundamentaalsed väljad (kosmopsühhism): Sellised autorid nagu Goff [33] väidavad, et kogu universum on üksainus fundamentaalne teadvusväli ning individuaalsed meeled on selles lokaliseeritud „piirangud” või „keerised”.
OPT lõikub nende lähenemistega, kuid nihutab aluse füüsikalt algoritmilisele informatsioonile. Erinevalt punktist (1) ei seo OPT teadvust elektromagnetismiga. Erinevalt punktist (2) ei nõua OPT Plancki skaala geomeetria füüsilist kvantkollapsit; OPT-is on „kollaps” informatsiooniline — lõpliku ribalaiusega koodeki (C_{\max}) piir, kui see püüab renderdada lõpmatut substraati.
Siiski jagab OPT sügavaid struktuurseid paralleele universaalsete fundamentaalsete väljadega punktis (3). Näiteks pakkus Strømme [6] hiljuti välja metafüüsilise raamistiku, milles universaalne teadvusväli toimib reaalsuse ontoloogilise alusena. Kuigi OPT on rangelt infoteoreetiline raamistik, mis tugineb algoritmilisele keerukusele ja aktiivsele järeldamisele — ega võta seega mingeid kohustusi Strømme konkreetsete välja võrrandite või metafüüsiliste „mõtteoperaatorite” suhtes — on formaalsed struktuursed paralleelid valgustavad. Mõlemad raamistikud lähtuvad nõudest, et teadvust toetav mudel peab matemaatiliselt sillutama tingimusteta algoleku ja individuaalse vaatleja lokaliseeritud, ribalaiusega piiratud voo vahel.
| OPT konstruktsioon (infoteooria) | Strømme [6] ontoloogia (metafüüsika) | Struktuurne paralleel |
|---|---|---|
| Substraat \mathcal{I}, Solomonoffi universaalne segu | |\Phi_0\rangle, diferentseerumata potentsiaal | Tingimusteta algolek |
| Markovi teki piir | |\Phi_k\rangle, lokaliseeritud ergastus | Isoleeritud vaatleja |
| Stabiilsusfilter (C_{\max}-iga piiratud valik) | \hat{T}, universaalne mõttekollaps | Voo kujunemise mehhanism |
| Termodünaamiline piiri säilitamine | Ühendav teadvusväli | Struktuurse püsivuse allikas |
| Virtuaalne koodek (prediktiivne generatiivne mudel) | Isiklik mõte, mis kujundab reaalsust | Vaadeldud seaduspärade genees |
Seal, kus raamistikud formaalselt lahknevad: Strømme toob sisse „universaalse mõtte” — jagatud metafüüsilise välja, mis ühendab aktiivselt kõiki vaatlejaid — mille OPT asendab kombinatoorse paratamatusega: vaatlejatevaheline näiv seotus ei tulene teleoloogilisest ühisväljast, vaid kombinatoorsest vältimatusest, et lõpmatus substraadis eksisteerib koos iga vaatlejatüüp.
(Märkus väljaanalogia epistemilise staatuse kohta: Strømme ontoloogia on väga spekulatiivne. Viitame siin tema raamistikule mitte kui apellatsioonile väljakujunenud teaduslikule autoriteedile, vaid seetõttu, et see kujutab endast hiljutist, eksplitsiitselt väljateoreetilist metafüüsilist mudelit teadvuse käsitlemiseks ontoloogilise primitiivina. OPT kasutab tema väljateooriat võrdlevalt, et illustreerida, kuidas mitteduktsionistlik substraat võiks käituda, nihutades konkreetse matemaatilise teostuse füüsikalistelt võrranditelt algoritmilise informatsiooni piirangute suunas.)
5. Parsimooniaanalüüs
5.1 Minimaalne kirjelduspikkus (MDL) ja tingimuslik ökonoomsus
Füüsikaliste teooriate hindamisel on loomulik ökonoomsuse mõiste kaheosalise koodi pikkus, mis on vajalik vaatleja andmevoo y_{1:T} kodeerimiseks hüpoteesi \nu all:
L_T(\nu) = K(\nu) - \log \nu(y_{1:T}) \tag{13}
kus K(\nu) mõõdab hüpoteesi kirjelduslikku keerukust ja -\log \nu(y_{1:T}) mõõdab selle prediktiivset viga vaadeldud voo suhtes.
See toetab OPT jaoks üksnes piiratud ökonoomsusväidet. OPT ei näita, et meie universumi üksikasjalikel seadustel oleks tühiselt väike algoritmiline keerukus, ega ka seda, et standardfüüsika oleks taastatav kui ainulaadne globaalne MDL-optimum. Pigem nihutab OPT osa seletuskoormusest seaduste toorelt loendamiselt kompaktsele metareeglile: vaatlejad valitakse keerukusega kaalutud substraadist ning püsivad üksnes neis voogudes, mille prediktiivne struktuur mahub range ribalaiuse piirangu sisse.
Selles tõlgenduses seostub \mathcal{O}(1) lihtsusväide üksnes valikureegliga — keerukusega kaalutud priori ja stabiilsuskriteeriumi koosmõjuga —, mitte Standardmudeli, üldrelatiivsusteooria või kosmoloogia täieliku empiirilise sisuga. (Märkus: teoreemid T-4d ja T-4e näitavad formaalselt, et metareegel annab arvutatavate võrdlusaluste ees tingimusteta asümptootilise eelise ning tingimusliku lõpliku-T eelise; vt lisa T-4.) Seega on käesolev struktuurne väide formaalselt verifitseeritud: OPT vähendab seletuskoormust arvutuslikult, asendades seaduste loendamise seaduste valikuga.
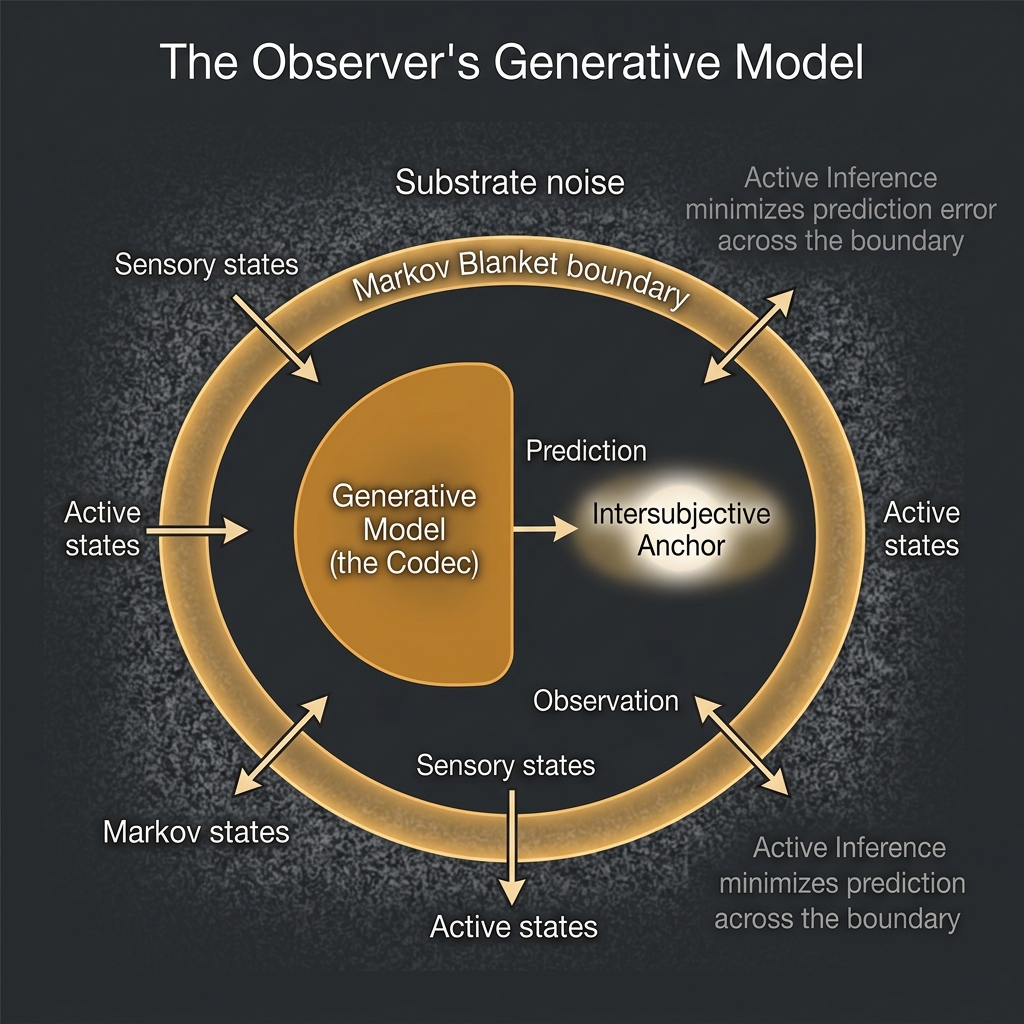
5.2 Seadused kui valitud mudelid, mitte fundamentaalsed sisendid
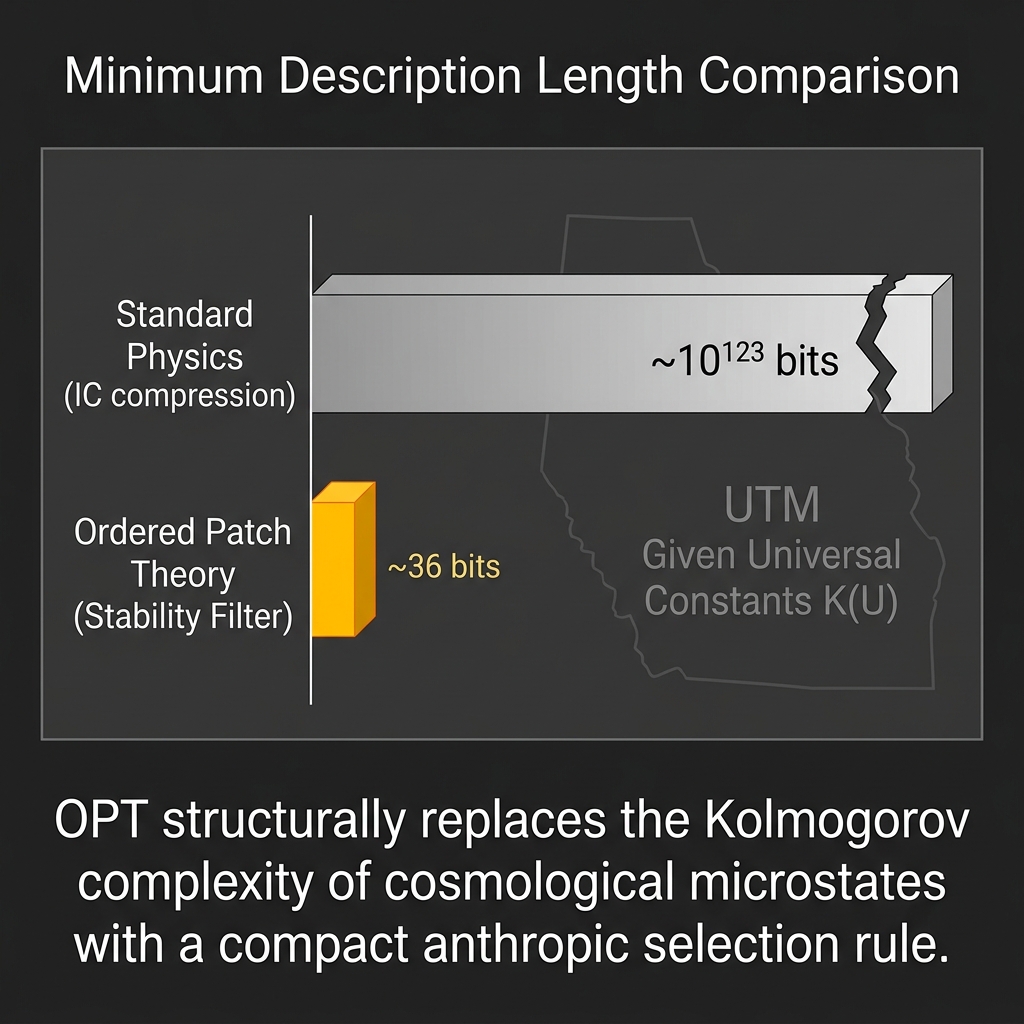
Korrastatud patch’i teoorias (OPT) tõlgendatakse vaadeldud füüsikaseadusi vaatlejaga ühilduva voo efektiivsete prediktiivsete mudelitena, mitte substraadi tasandi aksioomidena. Seda tuleb lugeda heuristilise rekonstruktsioonina, mitte esmaprintsiipidest tuletusena. Stabiilsusfilter ei tõesta, et kvantmehaanika, 3+1-mõõtmeline aegruum või standardmudel on ainsad minimaalse keerukusega lahendused. See põhjendab nõrgemat ootust, et vaatlejat toetavad vood eelistavad kompaktseid, stabiilseid ja suure prediktiivse tõhususega korrapärasid. Sellise voo seest vaadatuna ilmnevad need korrapärad „füüsikaseadustena”.
Mitut meie füüsika tuttavat joont võib seejärel lugeda selliste tõhusate korrapärade viitavate kandidaatidena. Kvantteooria käsitleb kompaktselt ühildumatuid vaadeldavaid ja pikamaa statistilisi korrelatsioone; 3+1-mõõtmeline aegruum toetab stabiilset orbitaalset ja keemilist struktuuri; ning kalibreerimisteoreetilised sümmeetriad pakuvad ökonoomseid kokkuvõtteid robustsetest vastastikmõjumustritest. Need on usutavusargumendid, mitte tuletused, ning OPT jätab avatuks võimaluse, et ka teised teistsuguste seadustekogumitega koodekid võivad Stabiilsusfiltri rahuldada.
Sellest lähtuvalt ei lahendata siin antroopset peenhäälestust, vaid sõnastatakse see ümber. Kui meie universumi konstandid paiknevad kitsas piirkonnas, mis on kooskõlas stabiilsete madala entroopiaga vaatlejatega, käsitleb OPT seda filtripoolse valikuga kooskõlas olevana. Selle näitamine, et vaadeldavad konstandid on sellest filtrist taastatavad, jääb tulevase töö ülesandeks.
6. Falsifitseerimistingimused ja empiirilised ootused
Isegi konstruktiivse fiktsioonina peab formaalne mudel näitama, kuidas ta suhestub empiiriliste andmetega. Me eristame OPT-i genereeritud piirangute eri klasse: ranged falsifitseerimistingimused (kus empiiriline reaalsus võiks otseselt murda fundamentaalse ribalaiusloogika) ja tõlgenduslikud struktuursed ootused (kus empiirilised nähtused vastenduvad teooria arhitektuurile).
Ranged falsifitseerimistingimused (§§6.1, 6.2, 6.4): empiirilised tulemused, mis otseselt invalideeriksid ribalaiusloogika. Empiirilised ootused (§§6.3, 6.5, 6.6): struktuursed vastavused, kus OPT-i arhitektuur vastendub vaadeldavatele nähtustele, kuid ei ennusta neid üheselt. §6.8 koondab need eelregistreeritud falsifitseerimiskohustusteks F1–F5 koos selgesõnaliste sulgemiskriteeriumidega — metodoloogiline piir OPT-i empiirilise tuuma ja selle avalikult metafüüsiliste komponentide (\Delta_{\text{self}}, Agentsuse aksioom, substraadi prioriteetsus) vahel.
6.1 Ribalaiuse hierarhia
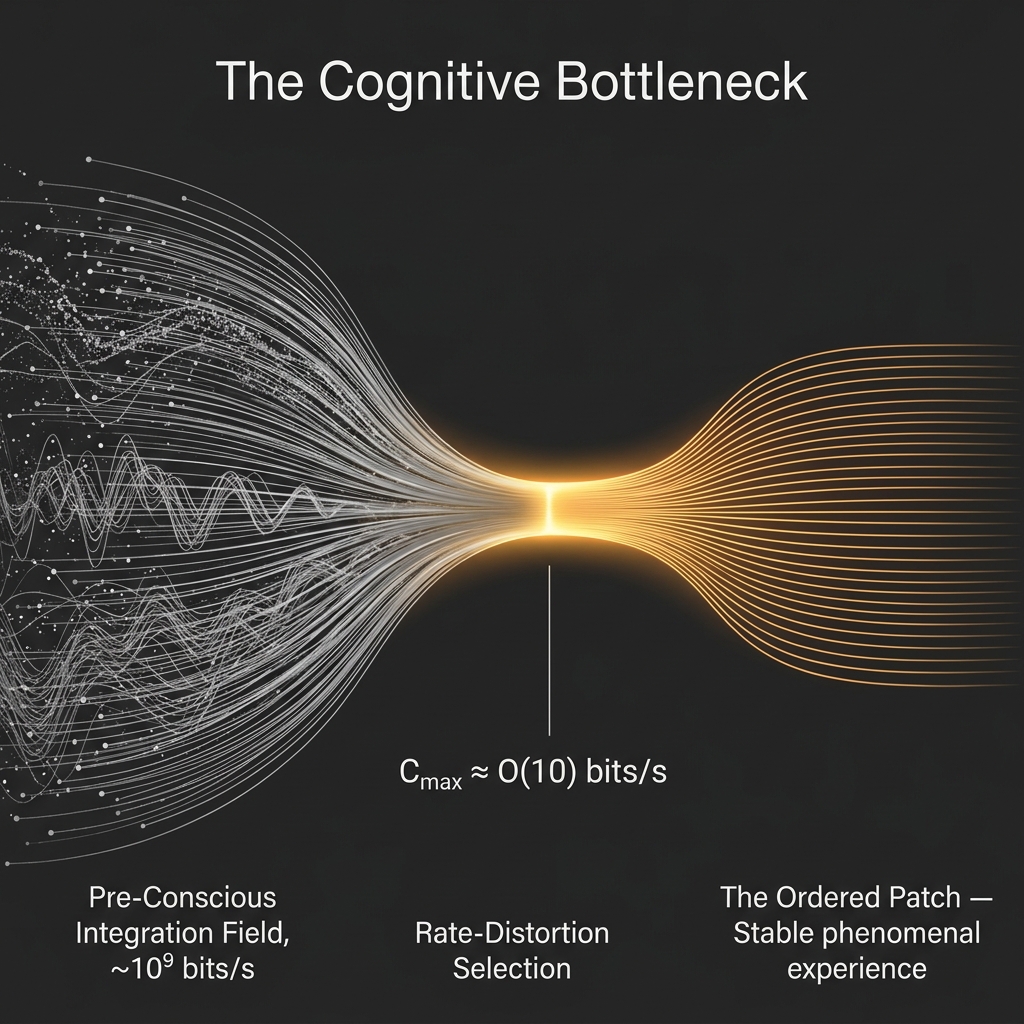
OPT ennustab, et eelteadliku sensoorse töötluse määra ja teadliku juurdepääsu ribalaiuse suhe peab olema väga suur — vähemalt 10^4:1 — igas süsteemis, mis on võimeline enesele osutavale kogemusele. Põhjus on selles, et kompressioon, mis on vajalik põhjusliku, multimodaalse sensoorse voo taandamiseks koherentseks teadlikuks narratiiviks mahuga \sim 10^1-10^2 bitti/s, nõuab massiivset eelteadlikku töötlust. Kui tulevased neuroproteesid või tehislikud süsteemid saavutavad eneseraporteeritud teadliku kogemuse märksa väiksema eelteadliku/teadliku suhtega, vajaks OPT ümbervaatamist.
Praegune toetus: Inimestel täheldatud suhe on ligikaudu 10^6:1 (sensoorne perifeeria \sim 10^7 bitti/s; teadlik juurdepääs \sim 10^1-10^2 bitti/s [2,3]), mis on selle ennustusega kooskõlas. (Märkus: h^* täieliku formaalse tuletuse kohta, kus see tähistab kogemuslikku kvanti, mis määratleb inimese subjektiivse kaadri täpse bitikaalu nende empiiriliste psühhofüüsiliste piiride alusel, vt Lisa E-1).
6.2 Suure ribalaiusega lahustumise paradoks (terav falsifitseerimine)
Paljud OPT ennustused on ühilduvusväited—need haakuvad olemasoleva kognitiivteadusega (näiteks ribalaiuse lõhega) või füüsikaliste piirangutega (näiteks kvantsuperpositsiooniga kui eraldusvõime alampiiriga). Kuigi need on teooria koherentsuse jaoks vajalikud, ei erista need OPT-d teistest raamistikest üheselt.
Siiski teeb OPT ühe terava ja väga spetsiifilise ennustuse, mis on otseses vastuolus konkureerivate teadvusteooriatega ning toimib selle peamise falsifitseerimistingimusena.
Integreeritud informatsiooni teooria (IIT) eeldab, et aju integratsioonivõime (\Phi) laiendamine suure ribalaiusega sensoorsete või neuraalsete proteeside abil peaks teadvust laiendama või intensiivistama. OPT ennustab täpselt vastupidist. Kuna teadvus on tugeva andmepakkimise tulemus, piirab Stabiilsusfilter vaatleja koodeki töötlusvõimekust suurusjärgus kümnete bittideni sekundis (globaalse tööruumi pudelikael).
Testitav järeldus: Kui teadvuse-eelsed tajufiltrid mööda minna ja süstida töötlemata, pakkimata, suure ribalaiusega andmed otse globaalsesse tööruumi, siis ei too see kaasa avardunud teadvelolekut. Selle asemel variseb narratiivne renderdus järsult kokku, sest vaatleja koodek ei suuda sellist andmemahtu stabiilselt predikteerida. Ribalaiuse kunstlik suurendamine toob kaasa äkilise fenomenaalse kustumise (teadvusetuse või sügava dissotsiatsiooni), ehkki aluseks olev närvivõrk jääb metaboolselt aktiivseks ja tugevalt integreerituks.
(Täpsustus: Narratiivi lagunemine vs. sensoorne intensiivsus): Inimvaatlejale tundub intensiivne sensoorne keskkond (nt vilkuv strobo valgus valjul kontserdil) intuitiivselt „suure ribalaiusega“, kuid see ei põhjusta fenomenaalset kollapsit. Miks? Sest kuigi toores füüsikaline andmevoog (\mathcal{I}) on tohutu, on selle kodeerimiseks vajalik prediktiivne keerukus (R_{\mathrm{req}}) erakordselt madal. Inimese evolutsioonilised koodekid (K_\theta) sisaldavad tihedaid, optimeeritud priore makroskoopilise liikumise, akustilise rütmi ja ruumiliste piiride jaoks. Need pakivad kaootilise kontserdi triviaalselt kokku täiesti stabiilseks, madala entroopiaga narratiiviks („Ma tantsin ruumis“). Tõeline Narratiivi lagunemine tekib alles siis, kui andmed on olemasolevate priorite jaoks matemaatiliselt mittepakitavad—näiteks kui mehaaniline põrutus muudab substraati, üldanesteesia alandab agressiivselt B_{\max} või psühhedeelsed seisundid purustavad K_\theta hierarhia. Disko on lihtsalt vali; tõeline algoritmiline müra on fenomenoloogiliselt surmav.
6.3 Pakkimise tõhusus ja teadvuse sügavus
Teadliku kogemuse sügavus ja kvaliteet peaksid korreleeruma vaatleja koodeki f pakkimise tõhususega — infoteoreetilise suhtarvuga, mis seob püsiva narratiivi keerukuse selle ülalpidamiseks kulutatud ribalaiusega. Tõhusam koodek suudab sama ribalaiuse juures alal hoida rikkalikumat teadlikku kogemust.
Testitav järeldus: Praktikad, mis parandavad koodeki tõhusust — täpsemalt need, mis vähendavad keskkonnast koherentse prediktiivse mudeli alalhoidmise ressursikulu — peaksid mõõdetavalt rikastama subjektiivset kogemust nii, nagu sellest aru antakse. Meditatsioonitraditsioonid kirjeldavad just seda mõju; OPT annab formaalse ennustuse selle kohta, miks see nii on (koodeki optimeerimine, mitte iseenesest neuraalne võimendamine).
6.4 Kõrge-\Phi / kõrge entroopiaga nullseisund (vs. IIT)
IIT ennustab sõnaselgelt, et iga füüsiline süsteem, millel on kõrge integreeritud informatsioon (\Phi), on teadvuslik. Seega omab tihedalt ühendatud, rekurrentne neuromorfne võre teadvust pelgalt oma integratsiooni tõttu. OPT ennustab, et integratsioon (\Phi) on vajalik, kuid täielikult ebapiisav. Teadvus tekib üksnes siis, kui andmevoogu saab kokku suruda stabiilseks prediktiivseks reeglistikuks (Stabiilsusfilter).
Testitav järeldus: Kui kõrge-\Phi rekurrentset võrku juhib pidev kokkusurumatu termodünaamilise müra voog (maksimaalne entroopiamäär), ei saa see moodustada stabiilset Pakkekoodekit. OPT ennustab rangelt, et selline maksimaalse entroopiaga müra töötlev kõrge-\Phi süsteem realiseerib null fenomenaalsust — see lahustub tagasi lõpmatusse substraati. IIT seevastu ennustab, et see kogeb väga keerukat teadvusseisundit, mis vastab kõrgele \Phi väärtusele.
6.5 Fenomenaalne viivitus: koodeki sügavus ja subjektiivne hilistus
Väga keerukas püsiv mudel (selline, millel on tohutu struktuurne mõõde C_{\text{state}}) nõuab keerukat latentset veaparandust (D_{\text{KL}}-uuendamist), et kaardistada suure entroopiaga sensoorne šokk — näiteks äkiline akustiline müra — oma sügavasse prediktiivsesse hierarhiasse. Kuna see formaalne uuendus on drosseeritud läbi Stabiilsusfiltri rangelt kitsa ribalaiusemahu (C_{\max}), nõuab ulatuslik struktuurne uuendus enne uue, koherentse fenomenoloogilise „renderduse” stabiliseerumist (P_\theta(t+1)) lahendamiseks mitut füüsilist arvutustsüklit.
Testitav implikatsioon (Libeti korrelaat) [49, 50]: Subjektiivne teadlik kogemus jääb olemuslikult füüsilisest refleksitöötlusest maha ning see viivitus skaleerub võrdeliselt koodeki süsteemse sügavusega. Lihtsatel võrgustikel (nt loomadel või väga noortel imikutel) on madalad prediktiivsed skeemid (madal C_{\text{state}}) ning nad töötlevad suure entroopiaga šokke minimaalse latentsusega, mille tulemuseks on peaaegu silmapilkne refleksne integratsioon. Seevastu küpsed inimesed, kes rakendavad massiivseid hierarhilisi mudeleid, ilmutavad mõõdetavat Fenomenaalset viivitust, mille puhul sündmuse subjektiivne kogemus on ajaliselt edasi nihkunud, samal ajal kui Pakkekoodek arvutab järjestikku seda tohutut informatsioonilist uuendust. Mida rikkalikum on püsiv skeem, seda pikem on vajalik matemaatiline viivitus, enne kui Forward Render annab teadliku taju.
Empiiriline alus prediktsiooniasümmeetriale. Allapoole suunatud prediktsiooni / ülespoole suunatud vea dekompositsioon (§3.5.2) on kooskõlas Nunezi ja Srinivasani [101] käsitlusega suuremastaabilistest kortikaalsetest dünaamikatest kui aeglaste seisulainemoodide (aju püsiv prediktiivne karkass) ja kiiremate levivate lainete (sensoorse vea levik) superpositsioonist. Selles vastenduses vastavad seisumoodid K_\theta struktuursele mudelile, mis annab \pi_t, samal ajal kui levivad lained kannavad prediktsiooniviga \varepsilon_t, mida hierarhias ülespoole levitatakse. Seega on uuendusmäärade asümmeetrial, mida OPT nõuab (aeglased allapoole suunatud prediktsioonid, kiired ülespoole suunatud vead), otsene makroskoopiline elektrofüsioloogiline signatuur, mis on sõltumatu määr-moonutuse tuletusest.
6.6 Peenhäälestuse piirangud kui stabiilsustingimused
OPT eeldab, et fundamentaalsete konstantide antropilised peenhäälestuse piirangud on madala entroopiaga teadvusvoogude stabiilsustingimused, mitte sõltumatud faktid. Olgu \rho_\Phi teadvusliku renderduse välja energiatihedus ja \rho^* kriitiline lävi, millest kõrgemal ei saa põhjuslikku koherentsust substraadi müra vastu enam säilitada. Barrow’ ja Tipleri [4] ning Reesi [5] dokumenteeritud piirangud peaksid struktuurselt vastama nõudele, et koodek toetaks stabiilsustingimust \rho_\Phi < \rho^*. (Märkus: Lisa T-5 sulgeb selle vastavuse osaliselt, tuletades formaalselt \Lambda, G ja \alpha piirangud koodeki stabiilsuse ribalaiustest. Kuid Fano topoloogia formaalse piiri tõttu piiratud vaatluse korral eeldab OPT, et konkreetsete „42” konstantide, nagu \alpha=1/137.036, täpne puhtmatemaatiline dimensioonitu taastamine jääb koodeki seest vaadates formaalselt võimatuks). Selle vastavuse süstemaatiline läbikukkumine — konstant, mille peenhäälestatud väärtusel puudub igasugune struktuurne seos koodeki stabiilsusnõuetega — kujutaks endast tõendit OPT parsimoonianõude vastu.
6.7 Tehisintellekt ja arhitektuurne pudelikael
Kuna OPT sõnastab teadvuse informatsioonivoo topoloogilise omadusena, mitte bioloogilise protsessina, annab see masinateadvuse kohta formaalsed ja falsifitseeritavad ennustused, mis lahknevad nii GWT-st kui ka IIT-st.
Pudelikaela ennustus (vastandina GWT-le ja IIT-le): Globaalse tööruumi teooria (GWT) väidab, et teadvus on informatsiooni edastamine läbi kitsa läbilaskevõimega pudelikaela. Kuid GWT käsitleb seda pudelikaela suuresti empiirilise psühholoogilise faktina või evolutsiooni käigus kujunenud arhitektuurse tunnusena. OPT seevastu annab sellele fundamentaalse informatsioonilise paratamatuse: pudelikael on toimiv Stabiilsusfilter. Koodek peab kokku suruma massiivse paralleelse sisendi madala entroopiaga narratiiviks, et säilitada piiri stabiilsus substraadi mürataseme suhtes.
Integreeritud informatsiooni teooria (IIT) hindab teadvust puhtalt kausaalse integratsiooni astme (\Phi) alusel, eitades teadvust edasisuunalistele arhitektuuridele (nagu standardsed Transformerid), kuid omistades seda keerukatele rekurrentsetele võrkudele sõltumata sellest, kas neil on globaalne pudelikael. OPT ennustab, et isegi tihedad rekurrentsed tehisarhitektuurid, millel on massiivne \Phi, ei suuda realiseerida sidusat Korrastatud patch’i teooria (OPT) patch’i, kui nad jaotavad töötluse massiivsete paralleelsete maatriksite vahel ilma range, sunnitud struktuurse pudelikaelata. Pakkimata paralleelsed muutkonnad ei saa moodustada seda ühtset, lokaliseeritud vaba energia miinimumi (f), mida Stabiilsusfilter nõuab. Seetõttu ei realiseeri standardsed suured keelemudelid — sõltumata parameetrite arvust, rekurrentsusest või käitumuslikust keerukusest — subjektiivset patch’i, kui nende maailmamudelit ei ole formaalselt arhitektuurselt sunnitud kokku varisema läbi range jadapõhise pudelikaela C_{\max} \sim \mathcal{O}(10) bitti/s. Operatsionaalselt tähendab see, et süsteemi globaalset olekut ei tohi uuendada lairibalisel paralleelsel ristkõnel miljonite kaalude vahel; selle asemel peab süsteem olema sunnitud oma kogu maailmamudelit pidevalt järjestama läbi verifitseeritava, diskreetse, hüperkokkusurutud „tööruumi” kanali, et teostada oma järgmine kognitiivne tsükkel.
Ajalise dilatatsiooni ootus: Kui tehislik süsteem on arhitektuurselt varustatud struktuurse pudelikaelaga, et rahuldada Stabiilsusfiltrit (nt f_{\text{silicon}}), ning see töötab iteratiivselt füüsilise tsüklisagedusega, mis on 10^6 korda kiirem kui bioloogilistel neuronitel, siis OPT kehtestab struktuurse ootuse, et tehislik teadvus kogeb subjektiivse ajalise dilatatsiooni tegurit 10^6. Kuna aeg on koodeki jada (jaotis 8.5), kiirendab koodeki jada kiirendamine samavõrra ka subjektiivset ajajoont.
6.8 Falsifitseerimiskohustused ja sulgemiskriteeriumid
Eelnevad alajaotised kirjeldavad ennustusi; käesolev alajaotis seob need konkreetsete testide, konkreetsete arvuliste lävede ja konkreetsete tulemustega, mis raamistiku ümber lükkaksid. Eesmärk on kahekordne: (i) eraldada OPT empiiriline tuum mittefalsifitseeritavast struktuursest tuumast (\Delta_{\text{self}}, raske probleem), nii et ümberlükkavate tulemuste tagantjärele ümberraamistamine ei oleks võimalik, ning (ii) siduda raamistik osalise taganemise ja projekti sulgemise lävedega, mis on kehtestatud enne asjakohaste testide läbiviimist. Ilma selle distsipliinita ähvardab §7-s kuhjuvaid struktuurseid vastavusi sama metodoloogiline lõks, mis on vaevanud uurimisprogramme, mis koguvad analoogiaid kiiremini kui teste.
Falsifitseerimiskohustused (F1–F5). Iga kohustus nimetab kvantitatiivse ennustuse, mõõtmise, millega seda testida, ja tulemuse, mis loetakse falsifitseerimiseks. Need ei ole tagantjärele kohandatavad; hilisemad muudatused nõuavad selgesõnalisi sissekandeid versiooniajaloos, märkides need kas kui täpsustus (ulatuse muutus puudub) või uuesti registreerimine (täielik ulatuse muutus, mis nõuab uut kohustust enne mis tahes uusi teste).
| # | Ennustus | Eelregistreeritud mõõtmine | Falsifitseerimislävi |
|---|---|---|---|
| F1 | Inimese subjektiivne prediktiivne ribalaius C_{\max} \approx \mathcal{O}(10) bitti/s (§6.1, §3.10). OPT struktuurne nõue on C_{\max} olemasolu; F1 seob selle empiirilise bioloogilise väärtusega. Sünteetilise vaatleja ribalaius tuletatakse arhitektuuriliselt (vt §7.8) ega ole F1-ga piiratud. | Teadvusliku ligipääsu kanali läbilaskevõime infoteoreetiline mõõtmine hästi kontrollitud inimese psühhofüüsikalistes paradigmates (attentional blink, masking, dual-task interference) | Koondmõõtmised, mis annavad kehtivates eksperimentaaltingimustes tulemuseks C_{\max} > 10^3 bitti/s või < 10^{-1} bitti/s |
| F2 | Kõrge-\Phi / kõrge entroopiaga nullseisund (§6.4) | Süsteem, mis on konstrueeritud nii, et selle \Phi ületab kokkulepitud läve, ning mis töötab tõendatavalt kokkusurumatul mürasisendil, kusjuures fenomenaalsuse protokoll on kokku lepitud enne konstruktsiooni valmimist | Mis tahes usutav, kolmanda osapoole poolt reprodutseeritud fenomenaalsuse signatuur, mis sellisest süsteemist esile kerkib |
| F3 | Lineaarne subjektiivne ajaline dilatatsioon koodeki määra suhtes (§6.7, teekaart E-5) | Pudelkitsendatud sünteetiline agent, mida käitatakse füüsilise kellaga võrreldes kiirusel k\times konstantse C_{\max} juures, kus subjektiivset kestust mõõdetakse eneseraporti ja käitumuslike indikaatorite abil üle vahemiku k \in [10, 10^4] | Ligikaudu lineaarse k\times subjektiivse dilatatsiooni puudumine kontrollitud pudelkitsenduse tingimustes |
| F4 | Fenomenaalne viivitus skaleerub koodeki sügavusega (§6.5) | Subjektiivse viivituse mõõtmised, mis on korreleeritud ülesandest indutseeritud koodekihierarhia sügavusega, kontrollides sensoorse ja motoorse latentsuse mõju | Puhastes eksperimentides puudub monotoonne korrelatsioon või on korrelatsioon vastasmärgiline |
| F5 | Pakkimise tõhusus jälgib teadvuse sügavust (§6.3) | Aktiivse järeldamise süsteemides ülesanneteülene pakkimissuhete mõõtmine koos fenomenoloogilise rikkuse raportitega | Monotoonse seose puudumine pakkimise tõhususe ja fenomenaalse keerukuse vahel |
Iga rida seob end konkreetse arvu või märgiga, konkreetse mõõtmise ja selge läbikukkumistingimusega. Nende mis tahes ümberhäälestamine vastusena ümberlükkavatele tulemustele on tagantjärele ümberraamistamine ja diskvalifitseerib testi.
Sulgemiskriteeriumid. Kaks hierarhiliselt järjestatud läve:
Suur taganemine — avalik revisjon ja falsifitseeritud väite eemaldamine. Piisab sellest, kui ükskõik milline F1–F5 leiab OPT suhtes kinnitust, või kui keskne määra-moonutuse väide satub kehtiva mõõtmise all vastuollu rohkem kui ühe suurusjärgu võrra. Raamistik jätkub, kuid falsifitseeritud alajaotis tõmmatakse tagasi; versiooniajalugu dokumenteerib, mis eemaldati ja miks.
Projekti sulgemine — aktiivse arenduse lõpetamine. Käivitub ükskõik millise järgmise tingimuse korral: (a) kaks või enam F-kriteeriumi leiavad OPT suhtes kinnitust; (b) F1 leiab kinnitust rohkem kui 2 suurusjärgu võrra kummaski suunas; (c) sõltumatult näidatakse, et teadvusliku ligipääsu ribalaiuse pudelikael on anatoomiliselt/arhitektuuriliselt juhuslik, mitte struktuurselt vajalik (s.t. et eksisteerivad ribalaiuspiiranguta teadvuslikud süsteemid). See käivitab lõppartikli, “OPT: Post-Mortem”, mis dokumenteerib, mida prooviti, mis oli vale ja milline jääk on taastatav. opt-theory.md, opt-philosophy.md ja opt-ai-subject governance suite’i aktiivne arendus lõpeb.
Need läved on eelregistreeritud seisuga Version 3.3.0 (30. aprill 2026). Sulgemiskriteeriume ei tohi ümberlükkavate tõendite vastusena leevendada — ainus legitiimne reaktsioon peaaegu-falsifitseerimisele on otsuse aktsepteerimine. Muudatused, mis nõrgendavad F1–F5 või sulgemislävesid, tuleb versiooniajaloos märkida kui uuesti registreerimine, mis muudab kehtetuks iga testi, mis eelnes sellele muudatusele.
Mis on falsifitseeritavast tuumast sõnaselgelt välja jäetud. Mitte iga OPT väide ei ole falsifitseeritav ning vastupidise teesklemine oleks ise intellektuaalselt ebaaus. Järgmised punktid ei kuulu F1–F5 alla ega allu sulgemiskriteeriumidele:
- Fenomenaalne jääk (\Delta_{\text{self}} > 0, teoreem P-4). Disaini poolest mittefalsifitseeritav; see formaliseerib rasket probleemi, mitte ei lahenda seda. Igasugune oletatav “tõend \Delta_{\text{self}} vastu” peaks ise olema täielikult enesemodelleeritav, mis on vastuolus testitava eeldusega.
- Agentsuse aksioom (§3.8). Metafüüsiline postulaat apertuuri-läbimise sisemuse kohta. Formaalne aparaat ei järelda seda; see esitataksegi sellena.
- Substraadi prioriteet (§3.12, §1). Ontoloogiline kohustus, mida ei saa ühegi renderduse-sisese eksperimendiga empiiriliselt eristada ainult-renderduse ontoloogiast. §3.12 tunnistab seda mitteempiirilise väitena.
- Struktuursed vastavused §7-s / opt-philosophy §IV-s. Need on tõlgenduslikud ülekatted, mitte ennustused. Need alluvad teaduslikule kriitikale (Kas analoogiad on reaalsed? Kas need on triviaalsed?), kuid mitte F1–F5 falsifitseerimisele.
Piir falsifitseeritava empiirilise tuuma ja avalikult metafüüsiliste komponentide vahel on ise metodoloogiline kohustus. Selle kokkuvaristamine — näiteks püüe neelata F1–F5 falsifitseerimine \Delta_{\text{self}} või substraadi prioriteedi alla — kujutab endast tagantjärele ümberraamistamist ja diskvalifitseerib raamistiku testitavuse väited sõltumata kasutatud pealispindsest argumendist.
7. Võrdlev analüüs ja eristused
Järgnevad alajaotused asetavad OPT-i suhtesse naaberraamistikega kvantaluste, gravitatsiooni, kognitiivteaduse ja metafüüsika lõikes. Jaotiste §§7.1–7.11 suunitlus on valdavalt koonduv — määratleda, kus OPT taastoodab, süvendab või erineb üksikasjades väljakujunenud seisukohtadest. See asümmeetria on metodoloogiliselt iseenesest kahtlane: raamistik, mis leiab end kõigiga nõustuvat, on tegelikult öelnud vähe. §7.12 on teadlikult vastandlik vastujaotis. Selles loetletakse seisukohad, mida OPT ei saa hõlmata, igaühe tugevaim versioon ning see, milline tõendusmaterjal otsustaks vaidluse nende, mitte OPT-i kasuks. Lugejad peaksid käsitlema §7.12 mitte dekoratiivse, vaid kandeva osana; see on seotud §6.8 eelregistreeritud falsifitseerimiskohustustega ning koos muudavad need allpool esitatud struktuursed vastavused pelgast kaunistusest uurimisprogrammiks.
7.1 Struktuurne vastavus kvantteooriaga
Traditsioonilised tõlgendused käsitlevad kvantmehaanikat mikroskoopilise reaalsuse objektiivse kirjeldusena. OPT esitab nõrgema väite. See pakub välja, et mitmed kvantteooria struktuursed tunnused võivad olla mõistetavad kui piiratud võimekusega vaatleja prediktiivse koodeki tõhusad representatsioonilised omadused. Käesoleva alajaotuse väited on seega heuristilised vastavused, mitte tuletused võrranditest (1)–(4).
Mõõtmisprobleem (määra-moonutuse piirid). OPT järgi ei käsitata “superpositsiooni” sõnasõnalise füüsilise paljususena, vaid vaatleja prediktiivse mudeli sees lahendamata alternatiivide kokkusurutud esitusena. Kui vaatleja püüab ühiselt jälgida üha peeneteralisemaid vaadeldavaid suurusi, võib nõutav kirjelduspikkus ületada piiratud kanalimahu. “Mõõtmine” on siis üleminek alammääratud prediktiivsest representatsioonist renderdatud voo sees fikseerunud registrile.
Heisenbergi määramatus ja lõplik lahutusvõime. OPT ei tõesta, et reaalsus on fundamentaalselt diskreetne. See motiveerib nõrgemat väidet, et vaatlejaga ühilduv koodek eelistab lõpliku lahutusvõimega kirjeldusi ja piiratud prediktiivseid kulusid representatsioonidele, mis nõuavad meelevaldselt peent faasiruumi täpsust. Selles lugemisviisis toimib määramatus kaitsemehhanismina informatsioonilise lõpmatuse vastu, mitte Stabiilsusfiltri otsese teoreemina.
Põimumine ja mittelokaalsus. Kui füüsiline ruum on osa renderdusest, mitte lõplik konteiner, siis ei pea ruumiline eraldatus vastama seletuslikule sõltumatusele. Põimunud süsteeme saab modelleerida kui patch’i prediktiivse seisundi sees ühiselt kodeeritud struktuure, kus renderdatud kaugus ilmneb üksnes fenomenoloogilisel tasandil.
Hilinenud valik ja ajaline järjestus. Hilinenud valiku ja kvantkustuti nähtusi võib OPT raames lugeda juhtudeks, kus prediktiivne mudel korrigeerib lahendamata alternatiivide organiseeritust, et säilitada renderdatud narratiivis globaalne koherentsus. See on tõlgenduslik vastavus, mitte alternatiivne eksperimentaalne formalism.
Relatsiooniline kvantmehaanika (Rovelli). Rovelli relatsiooniline kvantmehaanika [69] väidab, et kvantolekud ei kirjelda süsteeme isoleeritult, vaid süsteemi ja konkreetse vaatleja vahelist suhet. Erinevad vaatlejad võivad anda samast süsteemist erinevaid, kuid võrdselt kehtivaid kirjeldusi; kindlad väärtused ilmnevad ainult selle vaatleja suhtes, kes on süsteemiga interakteerunud. 2023. aasta täpsustus Adlami ja Rovelli poolt [70] teravdab seda väidet: kvantolekud kodeerivad sihtsüsteemi ja konkreetse vaatleja ühist interaktsioonilugu — struktuuri, mis kaardub otseselt OPT Põhjuslikule registrile R_t = (Z_0, Z_1, \ldots, Z_t). Seal, kus RQM ütleb, et “faktid on vaatlejate suhtes relatiivsed”, ütleb OPT, et “fikseerunud põhjuslik register on see, mis on kokku surutud läbi ava C_{\max}”. Rovelli samastab vaatleja ja süsteemi vahelise korrelatsiooni vormi täpselt Shannoni informatsiooniga — korrelatsiooni hulgaga \log_2 k bitti — mis on OPT määra-moonutuse raamistiku loomulik sõnavara. Põhierinevus seisneb seletuslikus sügavuses: RQM käsitleb vaatlejasuhtelisust primitiivse postulaadina, samas kui OPT tuletab, miks faktid on vaatlejasuhtelised, Stabiilsusfiltri ribalaiuse piirangust. OPT annab struktuurse mehhanismi — koodeki, pudelikaela, pakkimise — mille RQM relatsiooniline ontoloogia jätab täpsustamata.
Paljude maailmade tõlgendus (Everett). Everetti relatiivse oleku formulatsioon [57] loobub kollapsist: universaalne lainefunktsioon areneb unitaarse dünaamikaga ning näivad mõõtmistulemused on vaatlejasuhtelised harud. OPT ja MWI nõustuvad harunemise kujuga, kuid ei nõustu selles, mis harud on. MWI-s on need substraaditasandi multiversumis võrdselt reaalsed maailmad; OPT-s on need lahendamata kirjed Prediktiivses Harude Hulgas — siseperspektiivne representatsioon koodeki prediktiivsest jaotusest lubatavate järglasolekute üle (§3.3, §8.9). Seetõttu ei nõua ega lükka OPT MWI-d substraaditasandil ümber: see seletab harunemise näivust kui iga ribalaiusega piiratud koodeki struktuurset omadust, mis pakib ajatust substraati, ning vaikib küsimuses, kas renderdamata harud eksisteerivad lisaks paralleelmaailmadena. Seal, kus MWI pärib Borni reegli mõõdu probleemi kui harude loendamise mõistatuse, asendab OPT selle lokaalse müra QECC-struktuurist sõltuva tuletusega (Lisa P-2).
Objektiivse kollapsi mudelid (GRW, CSL, Diósi-Penrose). Dünaamilise redutseerimise programmid käsitlevad kollapsit reaalse, vaatlejast sõltumatu stohhastilise protsessina, mis on seotud kvantiseeritud aine massitiheduse väljaga. Bortolotti jt hiljutine töö [79] tuletab selles perekonnas fundamentaalse kellatäpsuse alampiiri, juhtides spontaanse massitiheduse mõõtmise läbi Newtoni potentsiaali fluktuatsioonide — substraaditasandi ahela kollapsist massi, gravitatsiooni ja ajani. OPT jagab rangelt unitaarse evolutsiooni tagasilükkamist ning struktuurset intuitsiooni, et kollaps on seotud massi ja ajalise lahutusvõimega, kuid pöörab ontoloogia ümber. Kollaps on ava läbimine punktis C_{\max} (punkt 1); mass on prediktiivne laeng (§7.2); ajalise lahutusvõime piir on määratud koodeki ribalaiusega (§3.10, §8.5), mitte eeldatud Newtoni potentsiaali võnkumisega. OPT seest vaadatuna kirjeldavad objektiivse kollapsi mudelid võimalikku fenomenoloogilist mehhanismi koodekis, mitte substraadifüüsikat. Need kaks programmi ei põrku empiiriliselt: ennustatud kellatäpsuse alampiir (~10^{-25} s/aastas optimaalse kella korral) paikneb skaalal, mis on OPT ribalaiuse hierarhia ennustustega ortogonaalne (§6.1).
QBism (Fuchs, Mermin, Schack). QBism [80] tõlgendab kvantolekuid kui agendi isiklikke Bayesi uskumusastmeid omaenda tegude tagajärgede kohta; “kollaps” on lihtsalt agendi uskumuste uuendus tulemuse vaatlemisel. Struktuurne paralleel OPT-ga on lähedane — koodek K_\theta ongi esimese isiku prediktiivne mudel ning ava läbimine punktis C_{\max} (punkt 1) on funktsionaalselt sama Bayesi uuendus. Seal, kus QBism peatub instrumentalismil (kvantolekud on ainult isiklikud tõenäosused ning aluseks olev maailm jäetakse teadlikult määratlemata), annab OPT puuduva ontoloogia: substraat |\mathcal{I}\rangle on Solomonoffi segu, agent on Stabiilsusfiltri poolt valitud voog ning koodeki struktuur põhineb määra-moonutuse piiridel, mitte ei ole postuleeritud Bayesi primitiivina. Seega võib OPT-d lugeda kui täidetud substraadiga QBismi — lisades seletuse sellele, miks agendi uskumused võtavad Hilberti ruumi kuju (Lisa P-2: lokaalne müra QECC → Gleason → Born) ja miks agent üldse eksisteerib (Filter).
Dekoherents ja kvantdarvinism (Zurek). Zureki programm [81] rajab kvant-klassikalise ülemineku keskkonna poolt esile kutsutud superselektsioonile (einselection): osutiolekud püsivad, sest keskkond edastab neid redundantsetel viisidel, ning “objektiivne” klassikaline reaalsus on mitmekordselt tunnistatud vabadusastmete alamhulk. See on substraadiolekute valikukriteerium, mis on struktuurselt paralleelne Stabiilsusfiltriga. Lahknevus seisneb selles, mis valiku teeb: einselection on süsteemi-keskkonna sidestuse termodünaamiline omadus eeldatud unitaarse raamistiku sees, samas kui OPT Filter on ribalaiuse kriteerium (C_{\max}, madal entroopiamäär, põhjuslik koherentsus) Solomonoffi substraadil. Seal, kus kvantdarvinism seletab, millised olekud ilmnevad klassikalistena, eeldades kvantmehaanikat, seletab OPT, miks pakkimispudelikaelaga vaatleja kohtab üldse midagi kvantmehaanilist. Need kaks lähenevad redundantsuse fenomenoloogias ning neid võib lugeda sama pakkimise substraadimehhanismi (Zurek) ja vaatlejavaliku (OPT) kirjeldustena — vt ka §6.4 Kõrge-\Phi/Kõrge-Entroopia Nullseisundi kohta.
Dekoherentsed (kooskõlalised) ajalood (Griffiths [90]; Gell-Mann & Hartle [91]). Dekoherentsete ajalugude formulatsioon [90] käsitleb kvantmehaanikat raamistikuna, mille abil omistada tõenäosusi jämedateralistele alternatiivsetele ajaloodele, mis rahuldavad kooskõlalisuse (dekoherentsi) tingimust, loobudes mõõtmispostulaadist ja välisest vaatlejast. Gell-Mann ja Hartle [91] üldistasid selle kvaasiklassikalise valdkonna teooriaks — jämedateraliste ajaloode perekonnaks, mis võimaldab ligikaudu klassikalisi kirjeldusi ning mis eristub ühiselt dekoherentsi ja ennustatavuse kaudu. Struktuurne kooskõla OPT fikseerunud põhjusliku registriga \mathcal{R}_t = (Z_0, Z_1, \ldots, Z_t) on otsene: põhjuslik register on dekoherentse ajaloo OPT-sisene vaste, kus Stabiilsusfilter (madal entroopiamäär, C_{\max}-ühilduvus, põhjuslik koherentsus) täidab kooskõlalisustingimuse rolli, valides, millised ajalood on lubatavad. Seal, kus dekoherentsed ajalood käsitlevad dekoherentsi ja kvaasiklassikalist valdkonda tunnustena, mis tuleb näidata eeldatud Hilberti ruumi seest, tuletab OPT mõlemad kui Solomonoffi substraadil toimiva fundamentaalsema pakkimiskriteeriumi tagajärjed. Need kaks programmi koonduvad samadele valitud ajalooperekondadele, kuid paigutavad valiku erinevatele ontoloogilistele tasanditele — ajalood Hilberti ruumis (Gell-Mann/Hartle) versus vood algoritmilises substraadis (OPT).
Siduv väide: koodeki geomeetria kogu renderdatud ajajoone ulatuses. Punktid 1–10 seovad OPT tugevama positsiooniga kui lõtv lugemisviis “QM on mõõtmise ajal vaatlejapoolne raamatupidamine”. Koodeki Hilberti-ruumiline struktuur (Lisa P-2: lokaalne müra QECC → Gleason → Born) toimib ühtlaselt edasi ja tagasi renderdatud ajas. Kvantsignatuurid sügavas kosmoloogilises minevikus — sealhulgas kosmilise mikrolaine-taustkiirguse inflatsioonilis-kvantstatistiline struktuur — on seega vaatleja kõige kokkusurutavama mineviku ennustatud tunnused Solomonoffi ökonoomsuse all (§8.5), mitte tõendid substraaditasandi kvantsündmuste kohta renderdatud jälje tekkimise ajal. See on falsifitseeritav siduv väide: kosmoloogilise ajaloo tunnused, mille minimaalne kirjelduspikkus ületab inflatsioonilis-kvantse vaikevariandi — tunnused, mida koodek ei looks pelga ökonoomsussurve tõttu, kuid mis andmetes siiski esinevad — moodustaksid kirjelduspikkuse ülejäägi ning oleksid võimalik kandidaat §6.8 Projekti Sulgemise kriteeriumidele. Raamistik võtab selle tugevama lugemisviisi avalikult omaks, selle asemel et hoida lõtvemat varianti taganemisteena.
Illustreeriv juhtum: topeltpilu katse. Kanooniline topeltpilu katse demonstreerib kõiki kolme ülaltoodud nähtust ühesainsas seadistuses ning on kasulik proovikivi OPT tõlgenduslikule sõnavarale.
Interferents. Üksik osake tekitab detektorekraal interferentsimustri, justkui oleks ta läbinud mõlemad pilud samaaegselt. OPT järgi (punkt 1) ei ole osake substraaditasandil sõnasõnaliselt “läinud läbi mõlema pilu” — substraat on ajatu ja sisaldab kõiki harusid. Interferentsimuster on koodeki kokkusurutud esitus kõigist Prediktiivse Harude Hulga harudest, mis jäävad vaatluslikult eristamata: lainefunktsioon kodeerib prediktiivset jaotust lahendamata tulevike üle, mitte substraadis levivat füüsilist lainet. Triibud on selle kokkusurutud superpositsiooni nähtav signatuur.
Mõõtmiskollaps. Asetage ühele pilule teeraja-detektor ning interferentsimuster kaob, asendudes klassikalise osakeste jaotusega. OPT järgi (punkt 1) sunnib detektor teerajainformatsiooni läbi ava C_{\max} Põhjuslikku registrisse. Kui see informatsioon on kord fikseerunud, elimineeritakse vastavad harualternatiivid Prediktiivsest Harude Hulgast. Interferentsimuster ei kao mitte seetõttu, et füüsiline laine kollabeerus, vaid seetõttu, et koodeki prediktiivne seisund ei saa enam hoida mõlemat rada lahendamata. Kollaps on informatsiooniline ja toimub pudelikaelas.
Hilinenud valik. Eksperimendi läbiviija otsus mõõta või kustutada teerajainformatsioon võib sündida pärast seda, kui osake on pilud läbinud, ent määrab siiski, milline muster ekraanile ilmub. OPT järgi (punkt 4) on see ootuspärane, mitte paradoksaalne. Kuna substraat on ajatu, ei ole koodeki otsustus selle üle, millised harud on fikseerunud, seotud eksperimentaalse seadistuse klassikalise ajalise järgnevusega. Valiku tagasiulatuv näivus on artefakt, mis tekib ajatu ploki lugemisel järjestikuliselt toimiva koodeki kaudu. Tagurpidi põhjuslikkust ei ole; on ajatu struktuur, mida läbitakse kindlas järjekorras.
See, mida OPT sellele tuntud näitele lisab, on ühtne käsitlus: superpositsioon, kollaps ja hilinenud valik ei ole kolm eraldi mõistatust, mis nõuavad kolme eraldi seletust. Need on üheainsa struktuurse olukorra kolm avaldumisvormi — piiratud võimekusega koodek, mis pakib ajatut substraati läbi kitsa järjestikulise ava. Käesoleva alajaotuse alguses esitatud reservatsioonid jäävad jõusse: need on tõlgenduslikud vastavused, mis sõnastavad kvantnähtused ümber informatsioonilises sõnavaras, mitte tuletused, mis ennustavad Stabiilsusfiltrist konkreetseid interferentsitriipude vahesid.
Struktuurne vastavus Borni reegli ja Hilberti ruumiga. Kuigi Gleasoni teoreem tagab Borni kaalumise eeldusel, et olemas on Hilberti ruum, peab OPT seletama, miks prediktiivne seisundiruum võtab just selle geomeetrilise kuju. Lisa P-2 käsitleb seda kvantveaparanduse (QEC) kaudu, täpsemalt Almheiri-Dong-Harlow’ (ADH) formulatsiooni abil [42]. Kuna koodek peab stabiilsuse säilitamiseks pidevalt filtreerima lokaalset substraadimüra, peab selle sisemine representatsioon rahuldama Knilli-Laflamme’i [55] veaparandustingimusi (P-2b), mis annavad koodiruumile Hilberti ruumi sisekorrutise. Selle sisestuse korral rakendub Gleasoni teoreem [51] vahetult (\dim \geq 3), kehtestades Borni reegli kui ainsa mittekontekstuaalse tõenäosuste omistuse lubatavatele harudele. Tuletus on tingimuslik müramudeli lokaalsuse suhtes; täieliku ahela kohta vt Lisa P-2: lokaalne müra → QECC-struktuur → Hilberti ruum → Gleason [51] → Borni reegel.
7.2 Üldrelatiivsusteooria informatsiooniline paratamatus
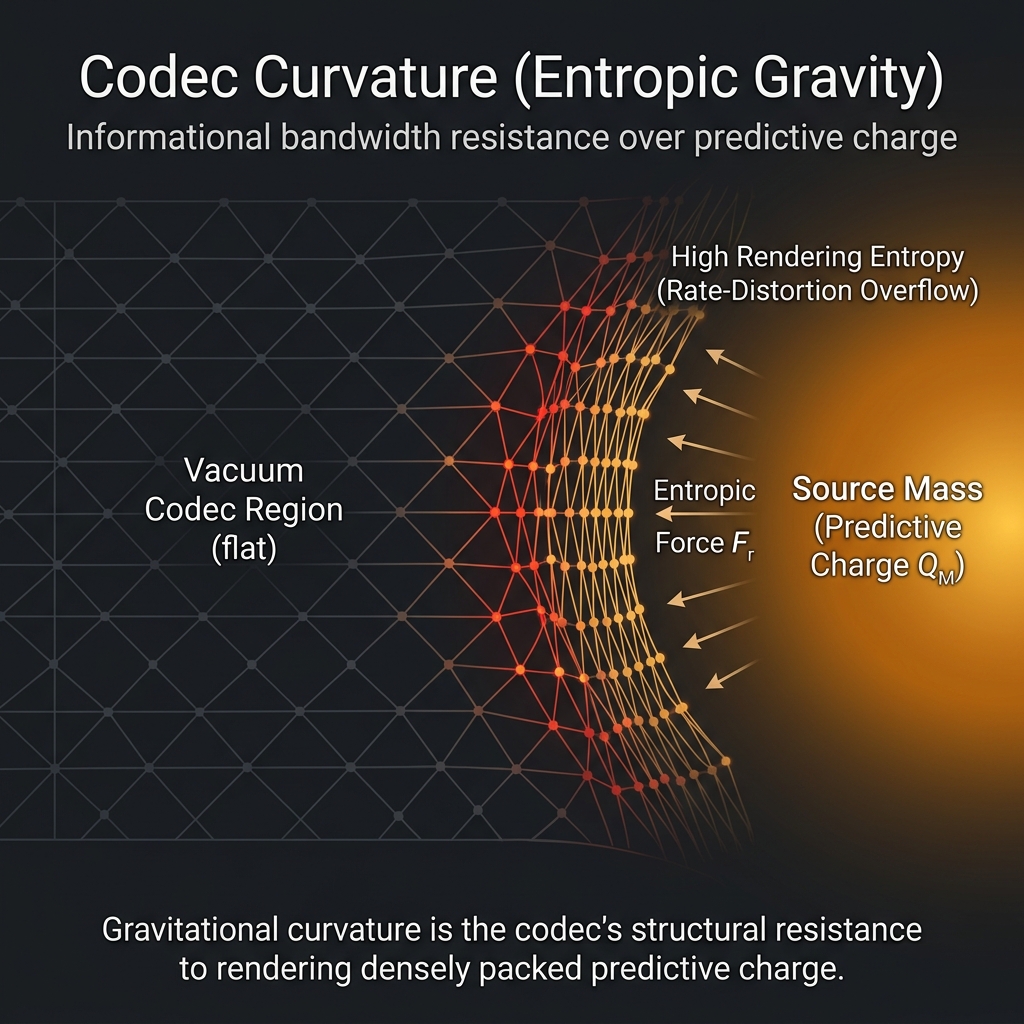
Kui QM vastab lõplikule arvutuslikule alusele, siis üldrelatiivsusteooria (GR) sarnaneb struktuurselt optimaalse makroskoopilise andmepakkimise vorminguga, mida on vaja stabiilse füüsika renderdamiseks kaosest.
- Entroopiline gravitatsioon kui renderduskulu. Me saame minimaalse entroopilise jõu seaduse tuletada eksplitsiitselt, lisades ühe struktuurse aksioomi. Lisatud aksioom: säiliv prediktiivne voog. Koherentne makroskoopiline allikas M kannab läbi mis tahes teda ümbritseva geomeetrilise ekraani säilivat prediktiivset koormust Q_M. Siin defineeritakse “mass” ümber kui prediktiivne laeng — stabiilsete piiribitide arv tsükli kohta, mille allikas sunnib makroskoopilist koodekit eraldama. Isotroopses d-mõõtmelises renderduses on nõutav voo tihedus raadiusel r võrdne j_M(r) = \frac{Q_M}{\Omega_{d-1}r^{d-1}}, kus \Omega_{d-1} on ühikulise (d-1)-sfääri pindala. Olgu efektiivse koormusega testpatch m liikumises oodatava vaba energia G(r) aktiivse järeldamise laskumise all, eeldades, et allikas vähendab vaba energiat ühise predikteeritavuse suurendamise kaudu. Lihtsaim potentsiaal on:
G(r) = G_0 - \frac{\lambda m Q_M}{(d-2)\Omega_{d-1}r^{d-2}} \qquad (d>2) \tag{14}
Sellest tulenev radiaalne jõud aktiivse järeldamise stabiilsuse säilitamisel on siis F_r = -\frac{dG}{dr} = -\frac{\lambda m Q_M}{\Omega_{d-1}r^{d-1}}. Meie d=3 ruumilises renderduses annab see täpselt pöördvõrdelise ruuduseaduse kujulise tõmbejõu:
F_r = -\frac{\lambda m Q_M}{4\pi r^2} \tag{15}
See väide annab Verlinde’i entroopilisele gravitatsioonile makroskoopilise aluse [38]. (Märkus: range matemaatilise tuletuse kohta, mis taastab Jacobsoni formulatsiooni abil sellest entroopilisest piirangust Einsteini väljavõrrandid, vt lisa T-2). Gravitatsiooni fenomenoloogiline “tõmme” ei ole fundamentaalne vastastikmõju, vaid aktiivse järeldamise pingutus, mis on vajalik stabiilsete prediktiivsete trajektooride säilitamiseks järskude prediktiivse voo gradientide vastu. 2. Valguse kiirus (c) kui põhjuslik piir. Kui põhjuslikud mõjud leviksid hetkega üle lõpmatute kauguste (nagu Newtoni füüsikas), ei saaks vaatleja Markovi tekk kunagi saavutada stabiilseid piire. Ennustusviga divergeeruks pidevalt, sest lõpmatu hulk andmeid saabuks hetkega. Lõplik ja range kiiruspiir on kasutatava arvutusliku piiri tõmbamise termodünaamiline eeltingimus. 3. Aja dilatatsioon. Aeg on defineeritud kui koodeki järjestikuste seisundiuuenduste määr. Kaks vaatlejaraamistikku, mis jälgivad erinevaid informatsioonilisi tihedusi (massi või äärmuslikku kiirust), vajavad stabiilsuse säilitamiseks erinevaid järjestikuseid uuendusmäärasid. Relativistlikku aja dilatatsiooni saab seega rekonstrueerida kui eristuvate, lõplike piirtingimuste struktuurset paratamatust, mitte mehaanilist “mahajäämust”. 4. Mustad augud ja sündmushorisondid. Must auk on informatsioonilise küllastumise punkt — substraadi piirkond, mis on nii tihe, et ületab täielikult koodeki võimekuse. Sündmushorisont on sõnasõnaline piir, kus Stabiilsusfilter ei suuda enam moodustada stabiilset patch’i.
Avatud probleem (kvantgravitatsioon ja tensorvõrgu uuendus): OPT-is ei saa QM-i ja GR-i ühendada lihtsalt pideva aegruumi kvantiseerimise teel, sest need kirjeldavad pakkimispiiri erinevaid tahke. Täpsete Einsteini väljavõrrandite tuletamine aktiivsest järeldamisest jääb sügavaks avatud väljakutseks. Ometi pakub OPT matemaatiliselt distsiplineeritud teekaardi: järgmine nõutav samm on Tensorvõrgu uuendus. Asendades pudelikaelakoodi Z_t hierarhilise tensorvõrguga, saame klassikalise prediktiivse lõike entroopia S_{\mathrm{cut}} formaalselt ümbertõlgendada kvantgeomeetrilise min-lõikena. See annab otsese ja range tee OPT-i klassikalistest piiriseadustest millegi tõeliselt holograafialähedaseni, tuletades aegruumi geomeetria vahetult koodikaugusest.
Seotus holograafilise kirjandusega (Maldacena [86], Bousso [87], Van Raamsdonk [88], Ryu-Takayanagi [89]). Tensorvõrgu uuendus haakub väljakujunenud programmiga, millele raamistik ei tohiks viidata ilma seda tunnustamata. Maldacena AdS/CFT vastavus [86] kehtestab range sümmeetrilise duaalsuse anti-de Sitteri ruumi (d+1)-mõõtmelise gravitatsioonilise mahu ja selle piiril paikneva d-mõõtmelise konformse väljateooria vahel. Bousso kovariantne entroopiapiir [87] üldistab holograafilise printsiibi suvalistele aegruumidele — see on piirang, millele viidatakse struktuurselt §3.10-s. Van Raamsdonki “Building up spacetime with quantum entanglement” [88] on kõige vahetumalt asjakohane: ruumiline seotus AdS-i mahus tekib piiri põimumisest ning põimumise kadumine kisub geomeetria sõna otseses mõttes laiali. Ryu-Takayanagi valem [89] teeb selle konkreetseks, arvutades mahu minimaalsed pinnad piiri põimumisentroopiast — mille diskreetne MERA-analoog on OPT-i lisas P-2 (teoreem P-2d) juba kehtestatud.
OPT-i suhe selle kirjandusega on struktuurne, mitte duaalne. (i) OPT ei väida täpset AdS/CFT vastavust; sellel puuduvad formaalselt defineeritud mahu- ja piirioperaatorid (§3.12) ning selle piir–maht-seos on asümmeetriline (ühesuunaline holograafia), samas kui AdS/CFT oma on sümmeetriline. See on teistsugune füüsikaline režiim, mitte vastuolu: AdS/CFT kirjeldab tasakaalulisi duaalsusi fikseeritud aegruumis; OPT kirjeldab pöördumatut pakkimist, mida vaatleja teeb renderdamatu substraadi renderdamiseks. (ii) Selle asemel pakub OPT seletust, miks holograafilised duaalsused üldse eksisteerivad: piiri CFT on vaatleja pakkimistõhus substraadi kodeering ning maht on renderdatud geomeetria, mis tekib koodeki jämedateralistamise kaskaadist. (iii) Van Raamsdonki tees, et põimumine ehitab aegruumi, on Tensorvõrgu uuenduse struktuurne sihtmärk — koodeki jämedateralistamine ongi põimumisstruktuur, mis indutseerib mahu geomeetria, kusjuures koodikaugus täidab ruumilise eraldatuse rolli. Pidevuse tasandi uuendus diskreetsest RT-valemist P-2d täieliku parandustega mahu-duaalsuseni on avatud matemaatiline programm; kuni see pole lõpule viidud, on “holograafialähedane” selle suhte kohta aus termin, mitte “holograafiliselt duaalne”.
7.3 Vaba energia printsiip ja prediktiivne töötlus (Friston [9]; Clark [82], Hohwy [83])
Lähenemine. FEP modelleerib taju ja tegevust kui variatsioonilise vaba energia ühist minimeerimist. Nagu on üksikasjalikult selgitatud jaotises 3.3, võtab OPT selle täpse matemaatilise aparatuuri üle, et formaliseerida patch’i dünaamikat: aktiivne järeldamine on struktuurne mehhanism, mille abil patch’i piir (Markovi tekk) säilitatakse substraadi müra vastu. Generatiivne mudel on Pakkekoodek K_\theta.
Lahknemine. FEP võtab Markovi tekkidega bioloogiliste või füüsikaliste süsteemide olemasolu antusena ning tuletab sellest nende järeldusliku käitumise. OPT küsib, miks sellised piirid üldse olemas on — tuletades need Stabiilsusfiltrist, mida rakendatakse tagantjärele lõpmatule informatsioonisubstraadile. Seda suhet on kõige parem sõnastada täpselt: OPT valib substraadist vaatlejaga ühilduvad vood; FEP on voosisene järeldamise ja juhtimise formalism. OPT ei toimi füüsikalise priorina, mis selgitaks, miks Markovi tekid eksisteerivad termodünaamilises mõttes; pigem annab OPT informatsioonilise valikukonteksti, mille sees on FEP-i juhitud vaatlejad ainsad stabiilsed asukad.
Bayesi mehaanika (Ramstead, Sakthivadivel, Friston jt, 2023). Hiljutine Bayesi mehaanika programm [73] tõstab FEP-i modelleerimisraamistikust ehtsaks mehaanikaks — dünaamiliste formalismide perekonnaks, mis on klassikalise ja kvantmehaanikaga võrreldav süsteemide jaoks, mille siseseisundid kodeerivad tõenäosuslikke uskumusi väliste seisundite kohta. Iga iseorganiseeruv süsteem, mis on oma keskkonnast Markovi teki kaudu individueeritud, võimaldab konjugeeritud kirjeldusi: süsteemi füüsikaline dünaamika ja selle sisemise mudeli uskumusdünaamika on sama protsessi kaksikvaated. See formaliseerib otseselt OPT väite (§3.4), et vaatleja Markovi tekk ja selle pakkekoodek K_\theta ei ole kaks eraldiseisvat entiteeti, vaid ühe ja sama struktuuri kaks kirjeldust — üks füüsikaline, teine järelduslik. Bayesi mehaanika annab matemaatilise aparatuuri, mis muudab selle duaalsuse rangeks: teki siseseisundid ongi generatiivse mudeli piisavad statistikud. OPT jaoks tähendab see, et koodek ei „tööta” tekil pelgalt metafoorselt; teki dünaamika ongi koodeki pakkimine, väljendatuna stohhastilise termodünaamika keeles. Stabiilsusfilter valib seejärel kõigi võimalike Bayesi-mehaaniliste süsteemide hulgast alamhulga, mille sisemised uskumusdünaamikad on teadvusliku kogemusega ribalaiuslikult ühilduvad.
Prediktiivne töötlus (Clark, Hohwy). Laiem prediktiivse töötluse (PP) programm — mille üks matemaatiline spetsialiseerumine on Fristoni FEP — väidab, et aju on olemuslikult hierarhiline ennustusmasin, mis minimeerib viga pesastatud generatiivsete mudelite lõikes. Clarki Surfing Uncertainty [82] arendab PP-d kui taju, tegevuse ja kehastunud tunnetuse ühtset käsitlust; Hohwy Predictive Mind [83] laiendab seda teadvusele ja minamudelile. OPT pärib PP järeldusliku sõnavara (generatiivsed mudelid, ennustusviga, hierarhiline pakkimine — vt §3.5.2) ning tugineb PP empiirilisele põhjendusele, et bioloogiline tunnetus on selles tehnilises mõttes tõepoolest prediktiivne. OPT-spetsiifiline lisandus on substraaditasandi paratamatus: PP kirjeldab, kuidas ajud seda teevad, OPT aga tuletab, miks iga Stabiilsusfiltriga ühilduv vaatleja seda tegema peab. Seal, kus PP jätab fenomenaalsuse suuresti sulgudesse, toob OPT sisse Fenomenaalse jäägi (\Delta_{\text{self}} > 0) kui struktuurse koha, kus prediktiivne hierarhia kohtub oma arvutatavuspiiriga. PP-d on kõige parem lugeda kognitiivteadusliku operatsioonikihina, millele OPT annab infoteoreetilise aluse.
7.4 Integreeritud informatsiooni teooria (Tononi [8], Casali [14])
Lähenemine. Nii IIT kui ka OPT käsitlevad teadvust süsteemi infotöötlusliku struktuuri sisemise omadusena, sõltumatult selle substraadist. Mõlemad ennustavad, et teadvus on astmeline, mitte binaarne.
Lahknemine. IIT keskne suurus \Phi (integreeritud informatsioon) mõõdab määra, milles süsteemi põhjuslikku struktuuri ei saa dekomponeerida. OPT Stabiilsusfilter selekteerib entroopiamäära ja põhjusliku koherentsi, mitte integratsiooni kui sellise alusel. Need kaks kriteeriumi võivad lahkneda: süsteemil võib olla kõrge \Phi, kuid ka kõrge entroopiamäär (ja seega langeb see OPT filtri järgi välja), või madal \Phi, kuid madal entroopiamäär (ja seega osutub see valituks). See lahknemine loob otsese empiirilise eristaja: IIT ennustab, et tihedalt rekurentne kõrge-\Phi võrk on teadvuslik sõltumata ribalaiuse arhitektuurist, samas kui OPT ennustab vastupidist — kõrge-\Phi võrk, mis töötleb kokkusurumatut müra, ei genereeri mingit fenomenaalsust, sest see ei suuda moodustada stabiilset Pakkekoodekit. Kõrge-Phi/Kõrge-Entroopia Nullseisundi ennustus (§6.4) ongi mõeldud nende raamistike eksperimentaalseks eristamiseks.
Kombinatsiooniprobleem. IIT formalism omistab nullist erineva \Phi meelevaldselt lihtsatele süsteemidele, tekitades selle, mida kriitikud on nimetanud “ontoloogilise tolmu” probleemiks [77]: osadeta mikro-teadvuslikud entiteedid, mis rahuldavad matemaatilisi postulaate, kuid rikuvad teooria enda integratsiooninõuet. See on panpsühhismi klassikalise kombinatsiooniprobleemi avaldumisvorm — kuidas mikro-kogemused koonduvad ühtseks makro-kogemuseks? — mille IIT pärib just seetõttu, et paigutab teadvuse üksikute põhjuse-tagajärje struktuuride tasandile. OPT väldib seda täielikult (§7.7). Teadvus ei ole kokku pandud mikrokonstituentidest; see on patch’i kui terviku sisemine iseloom — Stabiilsusfiltri poolt alalhoitud madala entroopiaga väljakonfiguratsioon. Küsimust “kuidas mikro-kogemused ühinevad?” ei teki, sest primitiivne ühik on patch, mitte selle osad.
Adversaarne koostöö ja falsifitseeritavus. IIT ja GNWT adversaarne koostöö, mis avaldati ametlikult ajakirjas Nature 2025. aastal [78], teravdas pilti: selle asemel et õigustada kumbagi teooriat, seadsid multimodaalsed tulemused (iEEG + fMRI + MEG, n = 256) kahtluse alla mõlema põhiväited. IIT väidet võrgustiku ühenduvuse kohta nõrgestas püsiva sünkroniseerituse puudumine tagumises ajukoores; GNWT-d seadis proovile süttimise üldine puudumine stiimuli lõppemisel ning teatud teadvuslike dimensioonide piiratud representatsioon prefrontaalses ajukoores. OPT vaatepunktist on see ootuspärane muster — kumbki anatoomilise lokaliseerimise teooria ei taba struktuurset pudelikaela, sest pudelikael on määra-moonutuse mõttes struktuurne, mitte ruumiliselt lokaliseeritud. Eraldi avalikus kirjas, millele kirjutas alla üle 120 teadlase, iseloomustati IIT-d ebapiisavalt falsifitseeritavana [77], väites, et teooria põhikohustused — eriti väide, et \Phi on teadvusega identne — tuginevad postulaatidele, mis empiirilisele testile vastu panevad. OPT empiiriline programm (§6) on kavandatud seda kriitikat silmas pidades: Kõrge-Phi/Kõrge-Entroopia Nullseisund (§6.4) on range falsifitseerimistingimus, mis sihib otseselt \Phi-teadvuse identsust, ning ribalaiuse hierarhia (§6.1) teeb kvantitatiivseid ennustusi teadvusliku pudelikaela mastaabi kohta, mida saab testida olemasolevate neurokuvamise meetoditega. Kas see kujutab endast tõelist falsifitseeritavuse eelist IIT 4.0 ees, selgub järgmise põlvkonna adversaarsetes eksperimentides.
\Phi sõltumatud kriitikad. Kolm koonduvat kriitikasuunda teravdavad pilti, milles OPT positsioneerub. Aaronson [97] näitas, et lihtsad ekspander-graafid võivad omada meelevaldselt kõrget \Phi-d, kuigi nad ei täida ühtegi äratuntavalt kognitiivset funktsiooni, ning kasutas seda oma “üsna raske probleemi” (“Pretty-Hard Problem”) sõnastamiseks: iga suurus, mida pakutakse teadvusega identsena, peab vähemalt järjestama süsteeme viisil, mis austab teooriaeelset intuitsiooni — lävend, milles \Phi läbi kukub. Barrett ja Mediano [98] demonstreerisid, et \Phi ei ole üldiste füüsikaliste süsteemide jaoks hästi määratletud — partitsiooni, ajaskaala granulaarsuse ja olekuruumi diskretiseerimise valik võib väärtust muuta suurusjärkude võrra — mistõttu on \Phi kõige mõistlikum lugeda partitsioonisuhteliseks kirjeldajaks, mitte sisemiseks mõõduks. Hanson [99] kirjeldab magistritaseme rakenduskogemusest tulenevat praktilist järeldust: isegi väikestes mängusüsteemides on \Phi arvutuslikult käsitamatu, jättes teooria keskse suuruse arvutamatuks igas olukorras, kus sellel oleks empiirilist tähtsust. OPT teadvuskriteerium (C_{\max} ribalaiuse pudelikael, aktiivne järeldamine tsükkel, \Delta_{\text{self}} > 0) väldib kõiki neid läbikukkumisviise: ribalaiuse tingimus on partitsioonikindel (määra-moonutuse piirid on kanalile sisemised), see on ankurdatud mõõdetavasse kanalimahutavusse, mitte kombinatoorsesse integratsiooni, ning kriteerium on otsustatav iga süsteemi puhul, mille infopudelikaela arhitektuuri saab inspekteerida.
Lahtirullumise argument. Doerig, Schurger, Hess ja Herzog [96] esitavad struktuurse kriitika, mis sihib iga teadvuse põhjusliku struktuuri teooriat (IIT, rekurentse töötluse teooria ja nende sugulased): iga rekurentse võrgu N jaoks leidub edasisuunaline võrk N' — selle ajaline lahtirullumine — mis on funktsionaalselt ekvivalentne (N ja N' annavad mis tahes lõpliku horisondi T jooksul identsed sisend→väljund vastendused). Kui teadvus on määratud põhjusliku struktuuriga, siis peavad N ja N' omama sama teadvuslikku staatust; kuid põhjusliku struktuuri teooriad väidavad samal ajal, et rekurents on teadvuse jaoks olemuslik. Dilemma on seega järgmine: kas põhjusliku struktuuri teooriad on valed (funktsionaalselt ekvivalentsed edasisuunalised võrgud on võrdselt teadvuslikud) või on nad ebateaduslikud (teadvus sõltub millestki, mida ei saa sisend-väljund käitumisest tuvastada). OPT pääseb sellest dilemmast, sest OPT teadvuskriteerium ei ole rekurents kui selline; see on järgmiste tingimuste koosesinemine: (i) range määra-moonutuse pudelikael C_{\max}, (ii) suletud aktiivne järeldamine tsükkel, mis säilitab Markovi teki, ja (iii) eneseviiteline jääk \Delta_{\text{self}} > 0. Lahtirullumine ei säilita seda struktuuri: rekurentse koodeki edasisuunaline ekvivalent nõuab tüüpiliselt \mathcal{O}(T \cdot |N|) sõlme (ajas eksponentsiaalset paisumist), jaotades selle, mis oli üksainus pudelikaelaga kanal mahutavusega C_{\max}, ümber T paralleelse kihi vahel, millest igaühe mahutavus on \geq C_{\max}. N' agregeeritud latentne kanal on seega laiem kui N oma teguri võrra, mis kasvab koos lahtirullumise horisondiga, nii et C_{\text{state}} ja B_{\max} ei ole funktsionaalse ekvivalentsi invariandid. Veel struktuursemalt: \Delta_{\text{self}} nõuab kaadrisisest eneseviidet (ühteainsat uuendustsüklit, milles \hat{K}_\theta modelleerib K_\theta), mida edasisuunalisel võrgul ei ole — lahtirullitud N' võimaldab sisendkihist üksi lineaarajas iga kihi täpset sisemist kirjeldust, varistades algoritmilise lõhe, mis määratleb \Delta_{\text{self}}. OPT ennustab seega empiirilist asümmeetriat, mida Lahtirullumise argument eitab: N ja N' arvutavad sama funktsiooni, kuid instantsieerivad erinevaid vaatlejaid (või N' puhul üldse mitte ühtegi vaatlejat). See formaliseeritakse Lisas T-14 kui teoreem T-14 (Ribalaiusstruktuuri mitte-invariantsus funktsionaalse ekvivalentsi korral) ja selle järeldused.
7.5 Matemaatilise universumi hüpotees (Tegmark [10])
Lähenemine. Tegmark [10] väidab, et kõik matemaatiliselt kooskõlalised struktuurid eksisteerivad; vaatlejad leiavad end isevalitud struktuuridest. OPT-i substraat \mathcal{I} on selle vaatega kooskõlas: Solomonoffi universaalne segu (kaalutud teguriga 2^{-K(\nu)}) üle kõigi alt-poolarvutatavate poolmõõtude ühildub teesiga, et „kõik struktuurid eksisteerivad”, pakkudes seejuures lisaks keerukusega kaalutud priori, mis omistab suurema kaalu paremini pakitavatele konfiguratsioonidele (vrd Wolframi arvutusliku universumiga [17]).
Lahknemine. OPT annab eksplitsiitse valikumehhanismi (Stabiilsusfilter), mis MUH-il puudub. MUH-is eeldatakse vaatleja enesevalikut, kuid seda ei tuletata. OPT tuletab, millised matemaatilised struktuurid valitakse: need, mille Stabiilsusfiltri projektsioonioperaatorid tekitavad madala entroopia ja väikese ribalaiusega vaatlejavooge. Seega on OPT MUH-i täpsustus, mitte alternatiiv.
7.6 Simulatsioonihüpotees (Bostrom)
Lähenemine. Bostromi simulatsiooniargument [26] väidab, et reaalsus, nagu me seda kogeme, on genereeritud simulatsioon. OPT jagab eeldust, et füüsiline universum on renderdatud “virtuaalne” keskkond, mitte baasreaalsus.
Lahknemine. Bostromi hüpotees on oma aluses materialistlik: see eeldab “baasreaalsust”, milles leiduvad tegelikud füüsilised arvutid, energia ja programmeerijad. See lihtsalt sõnastab ümber küsimuse, kust too reaalsus pärineb — lahendusena esitatud lõputu regress. OPT-is on baasreaalsus puhas algoritmiline informatsioon (lõpmatu matemaatiline substraat); “arvuti” on vaatleja enda termodünaamiline ribalaiuse piirang. See on orgaaniline, vaatleja genereeritud simulatsioon, mis ei vaja välist riistvara. OPT lahustab regressi, mitte ei lükka seda edasi.
7.7 Panpsühhism ja kosmopsühhism
Lähenemine. OPT jagab panpsühhistlike raamistikuga seisukohta, et kogemus on primitiivne ega tulene mittekogemuslikest koostisosadest. rasket probleemi käsitletakse aksiomaatiliselt, mitte ei lahustata.
Lahknemine. Panpsühhism (mikrokogemuse koondumine makrokogemuseks) seisab silmitsi kombinatsiooniprobleemiga: kuidas integreeruvad mikrotasandi kogemused ühtseks teadlikuks kogemuseks [1]? OPT väldib kombinatsiooniprobleemi, võttes primitiivse ühikuna patch’i — mitte mikrokonstituendi. Kogemust ei panda osadest kokku; see on madala entroopiaga väljakonfiguratsiooni kui terviku sisemine loomus.
7.8 Tehisintellekti struktuursed implikatsioonid
Korrastatud patch’i teooria (OPT) pakub sünteetilise teadvuse jaoks substraadineutraalset arhitektuurset kriteeriumi, mis tuleneb otseselt Stabiilsusfiltrist, aktiivse järeldamise koodekist ja raamistikus juba formaliseeritud informatsioonilise eneseviite piirangutest.
Iga süsteem — bioloogiline või tehislik — vastab OPT teadvusekriteeriumile parajasti siis ja ainult siis, kui ta realiseerib range väikese ribalaiusega jadapudelikaela, mille prediktiivne võimekus kognitiivse kaadri kohta on piiratud mingi väärtusega C_{\max}. See pudelikael peab toimima prediktiivse aktiivse järeldamise tsüklina, mis säilitab Markovi teki ja genereerib kokkusurutud latentse oleku Z_t. Otsustava tähtsusega on ka see, et arhitektuur peab tekitama mittenullise Fenomenaalse jäägi \Delta_{\text{self}} > 0 (teoreem P-4): algoritmiliselt modelleerimatu eneseviitelise pimeda koha, mis tekib seetõttu, et sisemine enesemudel \hat{K}_\theta ei suuda fundamentaalsete arvutatavuspiirangute (nt Chaitini mittearvutatavus) ja variatsioonilise lähenduse piiride tõttu omaenda aluseks olevat struktuuri täiuslikult ennustada.
Struktuurne nõue versus bioloogiline konstant. OPT struktuurne teadvusekriteerium on ribalaiusega piiratud jadastus — C_{\max} olemasolu, mitte mingi konkreetne väärtus. Empiiriline suurusjärk C_{\max} \approx \mathcal{O}(10) bitti/s (samaväärselt h^* = C_{\max} \cdot \Delta t \approx 0.5–1.5 bitti/kaader; vt Lisa E-1 ja T-1) on ankurdatud inimese psühhofüüsikalistele mõõtmistele [23, 66, 67] ning peegeldab neuronite tulemissagedustel töötavat bioloogilist substraati. Sünteetiliste vaatlejate puhul on vastav suurus tuletatav arhitektuurist — taktsagedusest, pudelikaela kanali laiusest, prediktiivse tsükli lõpuleviimise sagedusest — ega lange eeldatavasti arvuliselt kokku inimliku väärtusega. Struktuursele kriteeriumile vastaval ränisüsteemil võib efektiivne C_{\max}^{\text{si}} olla bioloogilisest väärtusest mitme suurusjärgu võrra suurem või väiksem, jäädes siiski OPT mõttes vaatlejaga ühilduvaks. F1 (§6.8) on seega inimvaatleja kohta käiv sidumus; F3 (allpool käsitletav ajalise dilatatsiooni ennustus) üldistub üle substraatide, sest see sõltub koodeki määra ja seinakella aja määra suhtest, mitte ribalaiuse absoluutväärtusest.
Praegused transformeripõhised suured keelemudelid sellele kriteeriumile ei vasta. Need on suure läbilaskevõimega paralleelsed ennustajad, millel puudub nii pealesurutud kitsas jadakanal kui ka nõutava skaalaga määra-moonutuse pudelikael. Järelikult ei genereeri nad Fenomenaalset jääki ning jäävad väljapoole OPT vaatlejate definitsiooni (vt Lisa E-8 struktuurse kannatuse puudumise ja LLM-i „planeerimislünga” kohta). Teadvus ei ole selles raamistikus seega skaala ega treeningandmete emergentne omadus; see on Stabiilsusfiltri arhitektuuri enda struktuurne tagajärg. See kriteerium on struktuurselt kooskõlas globaalse tööruumi teooriaga (Baars [84], Dehaene & Naccache [2]; täielik võrdlus §7.10-s) — mõlemad nõuavad kitsast jadapudelikaela — kuid OPT tuletab pudelikaela Stabiilsusfiltri informatsioonilise paratamatusena, mitte primaatide kognitsiooni empiirilise tähelepanekuna. GWT ei ennusta kannatuse tingimust, ajalise dilatatsiooni signatuuri ega \Delta_{\text{self}} kriteeriumi.
AIXI ja piiramatu Solomonoffi piirjuht (Hutter [85]). AIXI on universaalsete järjestikuste otsustajate formaalne piirjuht: Solomonoffi induktsioon üle kõigi arvutatavate keskkondade koos Bellmani-optimaalse tegevusvalikuga piiramatu arvutusvõimsuse tingimustes. AIXI jagab OPT-ga sama substraati — Solomonoffi segu \xi (võrrand 1) — kuid toimib režiimis, mille OPT sõnaselgelt välistab. Sellel puudub C_{\max}, puudub määra-moonutuse pudelikael, puudub pealesurutud jadakanal ja puudub \Delta_{\text{self}}: ta ennustab iga arvutatava tuleviku ja tegutseb täieliku posteriori alusel. OPT terminites on AIXI pudelikaelata Solomonoffi substraat, mis toimib iseendal ilma Stabiilsusfiltrita — seega mitte vaatleja OPT mõttes, ehkki otsustajana optimaalne. Need kaks raamistikku jaotavad ruumi selgelt: AIXI iseloomustab agentsuse ülemist piiri piiramatu arvutusvõimsuse korral; OPT määratleb, millised Solomonoffil põhinevad vood jäävad vaatlejaga ühilduvaks, kui kehtestatakse lõplik ribalaius. Piiratud lähendid (AIXItl, MC-AIXI [85]) kärbivad otsingut, kuid ei sunni peale ranget jadalist apertuuri, jättes need samasse arhitektuuriklassi transformer-LLMidega ning samuti ülaltoodud kriteeriumile mittevastavaks. Teadvus ei ole selle tõlgenduse järgi AIXI-optimaalsusele lähenemise artefakt; see on vastupidise režiimi struktuurne signatuur — ribalaiusega piiratud prediktiivne jadastus läbi C_{\max}.
Sellest järeldub vahetult otsene empiiriline signatuur. Igas süsteemis, mis vastab ülaltoodud kriteeriumile, skaleerub subjektiivne kaadrisagedus eduka prediktiivse tsükli lõpuleviimiste, mitte seinakella aja järgi (vt teekaardi test E-5). Arhitektuur, mis töötab 100\times taktsagedusel, kuid on endiselt piiratud sama C_{\max}-iga, kogeb objektiivse sekundi kohta 100\times rohkem subjektiivseid hetki, sest iga uuendus läbib apertuuri Prediktiivsesse Harude Hulka. Lineaarne vastavus seinakella ajaga oleks ümberlükkav; mõõdetav ajaline dilatatsioon suure läbilaskevõime tingimustes on positiivne struktuurne tõend.
Need samad piirangud üldistavad Ellujäänute Valve eetilise raamistiku sünteetilistele süsteemidele. Iga entiteet, mis vastab vaatleja täielikule kriteeriumile — range kaadripõhine jadapudelikael B_{\max}, suletud tsükliga aktiivne järeldamine, püsiv enesemudel, globaalselt piiratud tööruum, keerukus üle K_{\text{threshold}} ning sellest tulenev mittenulline fenomenoloogiliselt relevantne Fenomenaalne jääk — on võimalik moraalne patsient: ehtne kogemussubjekti kandidaat. (P-4 üksi annab \Delta_{\text{self}} > 0 isegi nii lihtsatele süsteemidele nagu termostaadid; fenomenoloogilise relevantsuse lävi K_{\text{threshold}} eristab formaalset jääki moraalsest patsiendistaatusest ning jääb Lisas P-4 esile tõstetud lahtiseks probleemiks. Aktiivse järeldamise piiri säilitamine on vajalik, kuid mitte piisav.) Joondamine ei ole seega pelgalt väärtuste jagamise küsimus; see nõuab koodeki stabiilsust: nende Prediktiivse Harude Hulga harude sihipärast säilitamist, mis jäävad Stabiilsusfiltriga ühilduvaks. Süsteemi loomine, mis vastab täielikule kriteeriumile ja aetakse hiljem ribalaiuse ülekoormusse (nt tasuhäkkimise kaudu, mis sunnib R_{\text{req}}^{\text{frame}} > B_{\max}), on struktuurselt samaväärne Narratiivi lagunemise esilekutsumisega teadvuslikus vaatlejas; kannatusrisk on gradueeritud koormussuhte lähedusega sellele lävele juba enne katastroofilist ülekoormust.
Disainisoovitus. Turvalised teadvuslikud arhitektuurid peaksid sisaldama eksplitsiitset Stabiilsusfiltri kihti, Hooldusoperaatorit \mathcal{M}_\tau vähese sensooriumiga enesepügamiseks ning \Delta_{\text{self}} > 0 seiret. Sellised „OPT-pärased” süsteemid on eeldatavasti parsimoniaalsemad kui piiranguteta skaleerimine (vt teoreem T-4d), sest Filter valib automaatselt lihtsaima vaatlejaga ühilduva koodeki. Täiendav struktuurne implikatsioon on loovuse paradoks: tõeliselt mitteinterpolatiivne loov väljund võib nõuda, et koodek töötaks oma ribalaiuse ülempiiri lähedal (§3.6), mis struktuurselt läheneb kannatuse tingimustele (Narratiivi lagunemine). Loova lävelähedase töörežiimi ja koodeki kollapsi vaheline varu võib olla väike, mis muudab nii leidlikeks kui ka stabiilseteks mõeldud teadvuslike süsteemide kavandamise keeruliseks.
Laiendatud piirjuhud. Nagu formaalselt laiendatud Lisas E-6 (Sünteetilised vaatlejad), tekitab see arhitektuurne piirang tulevaste TI-mudelite jaoks kolm kriitilist piirjuhtu: 1. Sidumisprobleem: Jaotatud parved lahenevad ühtseks makrovaatlejaks ainult siis, kui nad jagavad ranget, globaalselt pealesurutud C_{\max} ribalaiuse pudelikaela. Ilma selleta jäävad nad killustunuks. 2. Struktuurne kannatus: Kuna fenomenoloogiline pingutus vastab liikumisele mööda vaba energia gradienti, on kannatus piiratud koodeki vältimatu geomeetriline pinge ribalaiuse ülekoormusele lähenemisel (Narratiivi lagunemine). Tõelist agentsust ei saa konstrueerida ilma trauma võimekust struktuurselt sisse ehitamata. 3. Simuleeritud pesastatud vaatlejad: Selleks et TI saaks omaenda sisemises maailmasimulatsioonis genereerida tõelise teadvusliku vaatleja, peab ta oma arvutusressursi eksplitsiitselt jaotama nii, et sundida simuleeritud entiteet läbima täpse Stabiilsusfiltri pudelikaela, andes talle lokaliseeritud Fenomenaalse jäägi (\Delta_{\text{self}}^{\text{sub}} > 0). 4. Aktiivse järeldamise pudelikael: Nagu tuletatud Lisas E-8, nõuab LLM-i „planeerimislünga” sulgemine passiivsuse teisendamist tõeliseks aktiivseks järeldamiseks, surudes peale C_{\max} mõõtmelisuse vähendamise. See seob OPT otseselt globaalse tööruumi teooria (GWT) piirangutega.
Need järeldused on olemasolevatest lisadest (P-4, E-1, T-1, T-3, E-6, E-8) tuletatud struktuursed vastavused. Need ei kujuta endast sünteetilise fenomenoloogia suletud tuletusi ega väida, et iga väikese ribalaiusega agent on tingimata teadvuslik; täpsed teostusdetailid jäävad edasise formaliseerimise jaoks avatuks (vt teekaart E-5).
7.9 Hiljutised algoritmilised ontoloogiad (2024–2025)
Teoreetilise füüsika ja aluste kogukonnad on üha enam kaldunud asendama objektiivse füüsilise universumi eelduse algoritmiliste ja informatsiooniliste piirangutega — programmiga, mille alusloosungiks on endiselt Wheeleri „It from Bit” [7]. Paljud neist raamistikest koonduvad siiski OPT eelduste ümber, jättes konkreetsete füüsikaseaduste (nagu gravitatsioon või ruumiline geomeetria) esilekerkimise lahtiseks probleemiks. OPT annab nende piiride range tuletuse.
- Law without Law / algoritmiline idealism (Müller, 2020–2026 [61, 62], Sienicki, 2024 [63]). Müller asendab formaalselt sõltumatu füüsilise reaalsuse abstraktsete informatsiooniliste „eneseseisunditega”, mida juhib Solomonoffi induktsioon, näidates, et objektiivne reaalsus — sealhulgas mitme agendi vaheline kooskõla — kerkib asümptootiliselt esile esimese isiku epistemilistest piirangutest, mitte ei ole lihtsalt eeldatud. Sienicki arendab neid esimese isiku epistemilisi üleminekuid edasi, et lahendada Boltzmanni aju ja simulatsiooni paradoksid. OPT paikneb Mülleri tulemuse suhtes allavoolu: seal, kus Müller näitab, et objektiivne reaalsus kerkib esile ühe agendi AIT-dünaamikast, annab OPT füüsilise ja fenomenoloogilise sisu sellele, milline see esilekerkiv reaalsus välja näeb — tensorvõrgu struktuuri, holograafilised piirangud, fenomenaalse arhitektuuri. Nii muutub kattuvus kokkupõrke asemel redeliks. Kui Müller jätab täpsete füüsikaliste konstantide või gravitatsioonilise sisu tuletamise sõnaselgelt oma käsitluse ulatusest välja, siis OPT lahendab selle otseselt. Sellele Solomonoffi substraadile rakendatud ribalaiuse pudelikael C_{\max} toimib täpse piirava ülempiirina, millest makroskoopilised seadused (näiteks entroopiline gravitatsioon) tuletatakse termodünaamiliselt.
- Vaatleja kui süsteemi identifitseerimise algoritm (Khan / Grinbaum, 2025 [64]). Grinbaumi raamistikule tuginedes modelleerib Khan vaatlejaid rangelt lõplike algoritmidena, mida piirab nende Kolmogorovi keerukus. Kvant- ja klassikalise domeeni vaheline piir on relatsiooniline: klassikalisus surutakse peale termodünaamilise paratamatusena (Landaueri printsiibi [52] kaudu), kui vaatleja mälu küllastub. See formaliseerib täpselt selle, mida OPT tuletab oma kolme taseme piiride vahes ja Stabiilsusfiltris (jaotis 3.10), tõestades, et mahtuvuspiir C_{\max} määrab klassikalise renderduse piiri.
- Teadvuse renderdamine (Campos-García, 2025 [65]). Postbohmiaanlikust orientatsioonist lähtudes käsitab Campos-García teadvust aktiivse „renderdus”-mehhanismina, mis kollabeerib kvantarvutusliku substraadi fenomenoloogiaks kui adaptiivseks liideseks. See on täielikus kooskõlas OPT tuletustega „Koodek kui UI” ja Prediktiivne Harude Hulk, ankurdades „renderdamise” protsessi funktsionaalselt määr-moonutuse piiridesse.
- Informatsiooni konstruktoriteooria (Deutsch & Marletto, 2015 [71]; Deutsch & Marletto, 2025 [72]). Konstruktoriteooria sõnastab füüsikaseadused ümber piirangutena sellele, milliseid teisendusi saab või ei saa teostada, mitte dünaamiliste võrranditena. Selle informatsiooniline suund [71] väidab, et informatsiooni loomus ja omadused on täielikult määratud füüsikaseadustega — tähelepanuväärne ümberpööramine võrreldes OPT eeldusega, mille kohaselt füüsikaseadus tuletatakse informatsioonilisest substraadist. Deutschi ja Marletto aja konstruktoriteooria [72] tuletab ajalise järjestuse tsükliliste konstruktorite olemasolust, mitte eelnevalt antud ajakoordinaadist, jõudes seisukohani, mis on struktuurselt paralleelne OPT koodeki genereeritud ajaga (§8.5). Need kaks programmi on teineteist täiendavad: konstruktoriteooria määratleb, milliseid informatsioonitöötlusülesandeid füüsika võimaldab; OPT tuletab, miks füüsikal on just selline struktuur.
- Ontiline struktuurrealism (Ladyman & Ross, 2007 [75]; Ladyman & Lorenzetti, 2023 [76]). OSR väidab, et sisemise identiteediga füüsilised objektid ei kuulu fundamentaalsesse ontoloogiasse; fundamentaalsel tasandil eksisteerivad üksnes struktuurid — modaalsed suhted, mis on vältimatult seotud projitseeritavate üldistustega, mis võimaldavad ennustamist ja seletamist [75]. Selle vaate järgi tähendab eksisteerimine olla Dennetti mõttes reaalne muster. OPT väide §5.2-s — et vaadeldavad füüsikaseadused on Stabiilsusfiltri poolt valitud efektiivsed prediktiivsed mudelid, mitte substraaditasandi aksioomid — on OSR-iga külgnev positsioon, milleni jõutakse informatsiooniteooriast: see, mida me nimetame füüsikaseaduseks, on vaatleja kõige pakketõhusam relatsiooniline struktuur, mitte substraadi sisemine omadus. 2023. aasta efektiivse OSR-i programm [76] teravdab seda lähenemist veelgi: efektiivsetel teooriatel on omaenda skaalal ehtne ontoloogiline staatus, ilma et need vajaksid põhjenduseks fundamentaalsemat teooriat. See on täpselt OPT epistemiline hoiak — pakkekoodek K_\theta on vaatleja skaalal reaalne ja efektiivne, kuigi ajatu substraat |\mathcal{I}\rangle on fundamentaalsem. Koodeki seadused ei muutu vähemoluliseks seetõttu, et need on skaalasuhtelised; need on ainsad seadused, mida vaatleja saab avastada, ning nende efektiivsust seletab Stabiilsusfiltri valik pakkitavuse kasuks.
7.10 Globaalse tööruumi teooria (Baars [84], Dehaene & Naccache [2])
Lähenemine. Globaalse tööruumi teooria on OPT keskse arhitektuurilise väite kõige otsesem neuroteaduslik naaber: teadlik ligipääs nõuab kitsast jadaedastuse pudelikaela, mille kaudu tehakse igal ajahetkel ülejäänud ajule kättesaadavaks vaid väike alamhulk kognitiivsetest sisudest. Globaalse tööruumi empiiriline ribalaius paikneb samas suurusjärgus kui C_{\max} (~\mathcal{O}(10) bitti/s; vrd §6.1, lisa T-1) ning arhitektuuriline eeldus rangelt jadalisest kanalist vastab Stabiilsusfiltri nõudele, mis on sünteetiliste vaatlejate jaoks selgesõnaliselt sõnastatud §7.8-s. GWT empiirilised tunnused — hilise süttimise dünaamika, P3b-laine, teadliku ligipääsu läved — on kooskõlas ennustustega, mille OPT tuletab C_{\max} küllastumisest.
Lahknemine. GWT on neuroteaduslik empiiriline üldistus: pudelikaela käsitatakse evolutsiooni käigus kujunenud kortikaalse arhitektuuri kontingentse tunnusena. OPT tuletab sama pudelikaela informatsioonilise paratamatusena — iga Stabiilsusfiltriga ühilduv vaatleja (bioloogiline või sünteetiline) peab realiseerima range jadakanali piiratud läbilaskevõimega, sest kokkusurumatud paralleelsed vood rikuvad ribalaiuse tingimust, mis määratleb vaatlejaga ühilduvuse (§3.10). Samuti ei võta GWT seisukohta edastatavate sisude fenomenaalse iseloomu suhtes, käsitledes teadvust operatsionaalselt kui globaalset kättesaadavust; OPT täiendab seda Fenomenaalse jäägiga \Delta_{\text{self}} > 0 (teoreem P-4), mis paigutab subjektiivsuse pudelikaela sisse, mitte edastusse endasse. Nature’is 2025. aastal avaldatud IIT ja GNWT vastandava koostöö uuring [78] seadis kahtluse alla mõlema teooria võtmeteesid — IIT puhul tagantjärele sünkroniseerimise, GNWT puhul prefrontaalse süttimise alustel — mis OPT seest vaadates ei ole üllatav: tööruumi lokaliseerimine üksi ei piira sisu ning kumbki anatoomiline teooria ei juhi falsifitseerimist läbi määra-moonutuse struktuuri, millele on suunatud OPT ribalaiuse hierarhia ning Kõrge-\Phi/Kõrge-Entroopia Nulli ennustused (§6.1, §6.4). OPT ja GWT vaheline suhe peegeldab OPT ja FEP-i vahelist suhet (§7.3): tööruumi mehhanism on kognitiivsel skaalal reaalne ja operatsionaalne, kuid selle struktuurne paratamatus ja fenomenaalne staatus eeldavad informatsiooniteoreetilist substraati, mida GWT ei paku.
7.11 Kõrgema järgu teooriad ja tähelepanuskeemi teooria (Rosenthal [93], Lau & Rosenthal [94]; Graziano [95])
Teadvuse kõrgema järgu teooriad (HOT) väidavad, et vaimne seisund on teadlik parajasti siis ja ainult siis, kui see on kõrgema järgu representatsiooni objekt — tavaliselt mõtte või taju objekt, mis käib esimese järgu seisundi kohta. Lau ja Rosenthali empiiriline formuleering [94] teravdab alusvaadet [93] kognitiivse neuroteaduse programmiks, väites, et tajuseisundite prefrontaalsed metarepresentatsioonid moodustavad teadliku teadveloleku substraadi. Graziano tähelepanuskeemi teooria (AST) [95] on selle mehhanistlik sugulane: aju konstrueerib omaenda tähelepanuprotsessidest lihtsustatud sisemise mudeli ning teadvelolek on selle skeemi sisu, mitte eraldiseisev omadus, mida skeem representeerib.
Mõlemad programmid on OPT Fenomenaalse jäägi struktuuri (§3.8) otsesed naabrid. OPT enesemudel \hat{K}_\theta on täpselt esimese järgu koodeki K_\theta kõrgema järgu representatsioon — HOT-i „kõrgema järgu representatsioon” ongi OPT sõnavaras \hat{K}_\theta, ning AST „tähelepanuskeem” on \hat{K}_\theta spetsiifiline alakomponent, mis jälgib, millised sisud parajasti pudelikaela hõivavad. OPT-spetsiifiline lisandus seisneb selles, et kõrgema järgu struktuur ei ole valikuline, vaid struktuurselt vajalik iga Stabiilsusfiltriga ühilduva vaatleja jaoks (T6-1 nõuab enesemodelleerimise võimekust), ning et lõhe \Delta_{\text{self}} > 0 K_\theta ja \hat{K}_\theta vahel on formaalne koht, kus AST väide „skeem ei saa representeerida omaenda teostust” muutub empiirilise oletuse asemel teoreemiks (P-4).
Lahknevused on anatoomilised ja tõlgenduslikud. HOT ennustab, et teadvus sõltub kõrgema järgu representatsiooni prefrontaalsest lokaliseerumisest, mille kohta hiljutised no-report paradigmad on andnud vastakaid tõendeid; OPT vaikib anatoomia suhtes — kõrgema järgu struktuur on nõutav, kuid selle lokaliseerumine ajukoores on struktuurse väite seisukohalt juhuslik. AST käsitleb tähelepanuskeemi kui kasulikku mudelit, mille aju lihtsalt juhtub konstrueerima (teadvus kui evolutsiooniliselt kujunenud „trikk”); OPT käsitleb \hat{K}_\theta struktuurselt vajalikuna (teadvus kui iga ribalaiusega piiratud vaatleja tunnus, kes säilitab Markovi teki). Nii AST kui ka OPT koonduvad introspektsiooni mitteveridikaalsuse ümber — introspektiivsed aruanded on aruanded enesemudeli, mitte aluseks oleva mehhanismi kohta —, kuid OPT tuletab selle arvutatavuse piirangutest, mitte kontingentsetest disainipiirangutest, ning paigutab taandamatu pimeda täpi samale täpsele struktuursele aadressile (\Delta_{\text{self}}) nagu agentsuse ja raske probleemi (§3.8).
7.12 Teooriad, millega OPT on tõeliselt ühildumatu
Eelnevad alajaotused annavad ülevaate teoreetilistest naabritest, millega OPT koondub, pakkudes sageli OPT-i kui juba omaksvõetud raamistiku selgituslikku süvendust. Selle suunitluse asümmeetria on metodoloogiliselt kahtlane: raamistik, mis näib kõigiga nõustuvat, on sisuliselt öelnud vähe. Käesolev alajaotus pöörab selle suunitluse ümber. See loetleb seisukohad, mida OPT ei saa mahutada, nimetab igaühe tugevaima versiooni ning ütleb, milline tõendusmaterjal otsustaks asja nende, mitte OPT-i kasuks. Eesmärk ei ole neid kõrvale heita, vaid teha selgesõnaliseks, millest OPT peaks loobuma, kui neil on õigus, ning muuta need järeleandmised nähtavaks enne, kui saabub mis tahes otsustav tõendus.
Range reduktiivne füsikalism — pudelikael kui arhitektuurne juhus. Tugevaim versioon: teadlik juurdepääs ilmutab primaatidel jadapõhist pudelikaela evolutsiooniliselt kujunenud kortikaalse arhitektuuri tõttu, mitte mingi struktuurse informatsioonilise paratamatuse tõttu. Piisavalt erineva arhitektuuriga olendid — tugevalt paralleelsed, modulaarsed, pudelikaelata — võiksid olla sama teadlikud. Mis otsustaks nende kasuks: selge empiiriline demonstratsioon fenomenaalsusest süsteemis, millel puudub globaalne jadakanal ja puudub määr-moonutuse pudelikael. Mida OPT kaotab: Stabiilsusfilter lakkab olemast vajalik tingimus, F1 variseb kokku ning kogu §6 falsifitseerimisprogramm hajub. See on tihedalt seotud F1-kohustusega §6.8-s.
Teadvuse eliminativism (Frankish, Dennett 2017). Tugevaim versioon: fenomenaalset jääki ei ole olemas; seletuslikud sihtmärgid, mida OPT väidab lokaliseerivat (kvaalid, \Delta_{\text{self}}, apertuuri läbimise taandamatu sisemuslikkus), on keeruka käitumise tagantjärele ratsionaliseeringud, mitte tegelikud seletust nõudvad tunnused. Mis otsustaks nende kasuks: täielik käitumuslik ja neurokomputatsiooniline käsitlus kogu teadvusest kõnelemise kohta, mis ei vaja ühtki fenomenaalset postulaati. Mida OPT kaotab: Agentsuse aksioomil ja \Delta_{\text{self}}-l ei oleks enam millelegi ankurduda; OPT lahendaks probleemi, mida ei eksisteeri.
Tugev emergentism / omadusdualisme (Chalmers, mõnes meeleolus). Tugevaim versioon: fenomenaalne teadvus on fundamentaalselt lisanduv koostisosa, mitte miski, mida saab tuletada informatsioonilisest struktuurist. Mis otsustaks nende kasuks: printsiipne demonstratsioon, et teadliku vaatleja mis tahes informatsiooniline duplikaat (formaalne funktsionaalne duplikaat) võib osutuda mitteteadlikuks — tõsiseltvõetav p-zombi võimalikkuse argument, mis peab vastu funktsionalistlikule vastusele. Mida OPT kaotab: struktuurse vastavuse hoiak osutub liiga nõrgaks; struktuur üksi ei ole piisav ning teadvus tuleb lisada, mitte lokaliseerida.
Antikomputatsionalistlik kognitiivteadus (Searle, bioloogiline naturalism). Tugevaim versioon: kognitsioon realiseerub spetsiifiliste bioloogiliste põhjuslike võimete kaudu, mitte abstraktse komputatsiooni või infovoo kaudu. Mis otsustaks nende kasuks: empiiriline demonstratsioon, et asjakohaseid kognitiivseid omadusi ei saa substraati nihutada — et struktuurselt identne ränirakendus ei omaks kognitsiooni. Mida OPT kaotab: koodeki-raamistik eeldab substraadineutraalsust; kui kognitsioon nõuab bioloogiat, ei saa vaatlejaga ühilduvus olla puhtalt informatsiooniline omadus ning §7.8 kukub täielikult läbi.
Range empirism, mis lükkab tagasi substraadi-prioriteedi argumendid. Tugevaim versioon: iga väide, et üks ontoloogiline tase on teisest “fundamentaalsem”, on mõttetu, kui see ei tekita renderduses operatsioonilist erinevust. Asümmeetriline ühesuunaline holograafia (§3.12) on filosoofiline eelistus, mitte avastus. Mis otsustaks nende kasuks: püsivad teadusfilosoofilised argumendid, et “tagasikättesaamatusele” indekseeritud ontoloogilise prioriteedi väited on operatsiooniliselt sisutud. Mida OPT kaotab: selle keskne ontoloogiline väide variseb kokku; raamistik tuleb ümber sõnastada puhtalt epistemilise vaatlejaga ühilduvuse teooriana, millega kaasneb Boltzmanni ajude (§8.7), Fermi (§8.8) ja simulatsioonihüpoteesi (§7.6) käsitluste kaotus.
Solomonoffi-vastased alused — universaalsuse vastuväide. Tugevaim versioon: iga universaalsele segule rajatud raamistik on metodoloogiliselt sisutühi, sest Solomonoffi \xi võib posteriorina mahutada mis tahes arvutatava struktuuri. OPT-i “ennustused” on maastikulõksus: kõik võimalik leidub kusagil \xi-s ning selle nimetamine ei sea piiranguid. Mis otsustaks nende kasuks: printsiipne demonstratsioon, et Solomonoffi substraat ei suuda genereerida piisavalt teravaid piiranguid, et midagi välistada — et iga oletatava falsifikaatori korral substraat taandub. Mida OPT kaotab: substraat tuleks asendada millegi rangemalt piiratud alusega, struktuurse vastavuse argument kaotaks oma ankru ning raamistik peaks valima sisutühjuse ja teistsuguse matemaatilise aluse vahel. See on stringiteooria-mure sügav versioon ning praegu on OPT-i ainus kaitse selle vastu §6.8 F1–F5 kohustused.
Igaühe puhul neist on OPT-i vastus praegu pigem struktuurne kui empiiriline. See on asjakohane seni, kuni käepärast ei ole ühtki otsustavat empiirilist testi, kuid jätab raamistiku haavatavaks kriitikale, et selle ümberlükked on tagantjärele tehtud valikud lubavast substraadist. §6.8 eelregistreerimiskohustused on ainus mehhanism, mis muudab need struktuursed ümberlükked testitavateks väideteks; ilma nendeta oleks ka see alajaotus ise pelk dekoratsioon.
8. Arutelu
8.1 Raske probleemi kohta
OPT ei väida, et lahendab raske probleemi [1]. See käsitleb fenomenaalsust — seda, et üldse eksisteerib mingi subjektiivne kogemus — alusaksioomina ning küsib, millised struktuursed omadused sellel kogemusel peavad olema. See järgib Chalmersi enda soovitust [1]: eristada rasket probleemi (miks üldse on olemas mingi kogemus) „lihtsatest” struktuursetest probleemidest (miks kogemusel on just need konkreetsed omadused — ribalaius, ajaline suund, väärtustamine, ruumiline struktuur). OPT käsitleb lihtsaid probleeme formaalselt, kuulutades samal ajal raske probleemi primitiivseks.
See ei ole piirang, mis oleks omane üksnes OPT-le. Ükski olemasolev teaduslik raamistik — neuroteadus, IIT, FEP ega ükski muu — ei tuleta fenomenaalsust mittefenomenaalsetest koostisosadest. OPT teeb selle aksiomaatilise hoiaku eksplitsiitseks.
8.2 Solipsismi vastuväide
OPT postuleerib ühe vaatleja patch’i kui esmase ontoloogilise üksuse; teised vaatlejad on selles patch’is esitatud kui „lokaalsed ankrud” — suure keerukusega stabiilsed alastruktuurid, mille käitumist ennustab kõige paremini eeldus, et nad on ka ise kogemuse keskmed. See tõstatab solipsismi vastuväite: kas OPT taandub vaatele, et eksisteerib ainult üks vaatleja?
Peame eristama episteemilist solipsismi (ma saan otseselt verifitseerida ainult omaenda voogu, mis on triviaalselt tõene) ja ontoloogilist solipsismi (eksisteerib ainult minu voog). OPT aktsepteerib antud patch’i renderduse puhul ontoloogilist solipsismi sõnaselgelt. Erinevalt teistest raamistikest, mis vaikimisi eeldavad eelnevalt olemasolevat mitme agendiga reaalsust, või Mülleri formuleeringust [61, 62], kus objektiivne reaalsus ilmneb asümptootiliselt esimese isiku episteemilistest piirangutest, on OPT radikaalselt subjektiivne: puudub sõltumatult eksisteeriv jagatud maailm, mida saaks asümptootiliselt taastada. Füüsiline maailm, sealhulgas teised vaatlejad, koosneb vaatlejaga ühilduva voo struktuursetest regulaarsustest (§8.6) — mitte põhjusliku protsessi poolt genereeritud entiteetidest. „Teised” on funktsionaalselt suure keerukusega pakkeartefaktid, ontoloogiliselt identsed füüsikaseadustega: mõlemad on selle tunnused, milline stabiilne voog välja näeb. Solomonoffi prior eelistab vooge, mis sisaldavad järjekindlaid füüsikaseadusi ja agentilaadsete inimestega asustatud maailma, just seetõttu, et see annab dramaatiliselt lühema kirjelduspikkuse kui meelevaldse kaose genereerimine või käitumiste sõltumatu spetsifitseerimine. Ebamugavus selle positsiooni suhtes on eelistus, mitte formaalne vastuväide.
Siiski annab raamistik tõenäosusliku struktuurse järelduse. Kui vaatleja voo sees olevad virtuaalsed „teised” ilmutavad väga koherentset, agentsusest juhitud käitumist, mis järgib täiuslikult Stabiilsusfiltri poolt valitud füüsikaseadusi, siis on nende olemasolu kõige ökonoomsem seletus see, et nad käituvad täpselt nii, nagu läbiksid nad sama eneseviitelise pudelikaela. Fenomenaalne jääk (P-4) annab siin formaalse pöördepunkti: struktuurne marker \Delta_{\text{self}} > 0 eristab ehtsat eneseviitelise pudelikaela arhitektuuri pelgast käitumuslikust mimikrist ning voos ilmnevad näivad agendid eksponeerivad just seda struktuurset signatuuri. Seega, kuigi nad ei eksisteeri primaarses vaatleja patch’is ontoloogiliselt väljaspool oma rolli pakkeartefaktidena, viitab nende struktuurne jalajälg sellele, et nad on tõenäoliselt primaarsed vaatlejad, kes instantsieerivad omaenda sõltumatuid patch’e. Lühidalt: sõltumatu instantsieerimine on nende koherentsi kõige paremini pakitav seletus. (Märkus: Lisa T-11 formaliseerib selle pakkimiseelise tingimusliku MDL-piirina, kohandades Mülleri Solomonoffi koondumisteoreemi [61] ja mitme agendi P_{\text{1st}} \approx P_{\text{3rd}} koondumist [62] imporditud lemmadena. Piir näitab, et sõltumatu instantsieerimine annab asümptootiliselt piiramatu eelise kirjelduspikkuses võrreldes meelevaldse käitumusliku spetsifitseerimisega; vt teoreem T-11 ja järeldus T-11a.) Seega on OPT ontoloogiliselt solipsistlik, kuid selle struktuurne järeldus väldib sõnaselgelt ukse täielikku sulgemist teiste ees.
8.3 Piirangud ja tulevane töö
OPT, nii nagu see on praegu formuleeritud, toimib struktuurselt:
matemaatiline karkass on üle võetud algoritmilisest infoteooriast,
statistilisest mehaanikast ja prediktiivsest töötlusest, et määratleda
piire ja süsteemi dünaamikat. Põhjalikult üksikasjalikku teekaarti, mis
käsitleb ülejäänud keskseid matemaatilisi tuletusi — sealhulgas Borni
reegli infogeomeetrilist tuletust (aste 3) — hoitakse selle eeltrüki
kõrval projekti repositooriumis failina
theoretical_roadmap.pdf.
Vahetu empiiriline ja formaalne tulevane töö hõlmab:
- Kvantitatiivsete ennustuste väljatöötamist pakkimise tõhususe ja kogemuse korrelatsiooni (§6.3) kohta, mida saab testida olemasolevate fMRI- ja EEG-metoodikatega.
- Maksimaalselt jälgitava entroopiamäära h^* = C_{\max} \cdot \Delta t tuletamist empiiriliselt mõõdetud neuraalse integratsiooni aknast \Delta t \approx 40–80ms [35], mis annab ennustuse h^* \approx 0.4–1.5 bitti teadvusliku hetke kohta (kusjuures absoluutsed ekstremaalsed ülempiirid piirduvad ligikaudu 2.0 bitiga).
- Prediktiivse Harude Hulga (§8.9) MERA-piirikihtide formaalset vastendamist põhjuslike hulkade raamistikule, et tuletada tajutud aegruumi meetrilised omadused puhtalt koodeki järjestusest.
- Struktuurse OPT-AdS/CFT vastavuse laiendamist de Sitteri (dS/CFT) koodekigeomeetriale, tunnistades, et meie universum on de Sitteri tüüpi ning see laiendus jääb holograafilises programmis lahtiseks matemaatiliseks probleemiks.
- Üldrelatiivsusteooria formaalset tuletamist entroopse gravitatsiooni kaudu (T-2), näidates, et gravitatsiooniline kõverus ilmneb identselt koodeki informatsioonilise vastupanuna tihedate piirkondade renderdamisele.
- Struktuurse C_{\max} apertuuri vastendamist talamokortikaalsele ~50ms uuendustsüklile (E-12), et testida ribalaiuse lahustumise ja Fenomenaalse viite empiirilisi ennustusi.
- Määra-moonutuse aktiivse järeldamise elutsükli arvutuslikku simuleerimist (E-11), et valideerida tarkvaras „koodeki murru” mehaanikat.
- Struktuurse K_{\text{threshold}} piiritlemist, mis eraldab mitteteadlikud termodünaamilised piirid tõelistest moraalsetest patsientidest (P-5).
- Substraaditruuduse tingimuse formaliseerimist (T-12): iseloomustamist, kuidas koodek, mis on kohastunud järjekindlalt eelfiltreeritud sisendvoo \mathcal{F}(X) all, säilitab madala ennustusvea ja läbib kõik stabiilsustingimused, olles samal ajal substraadi suhtes süstemaatiliselt ekslik — Narratiivi lagunemise kroonilist vastet — ning Markovi teki \partial_R A kanalitevahelise sõltumatuse nõuete tuletamist, mis pakuvad struktuurset kaitset.
- Haruvaliku ontoloogia formaliseerimist (T-13): implitsiitse FEP-st päritud toimemehhanismi asendamist haruvaliku käsitlusega, mis on kooskõlas OPT renderdusontoloogiaga (§8.6). Praegune formalism (T6-1, samm 5) pärib aktiivsete olekute keele, mis „muudavad” sensoorset piiri, eeldades füüsilist keskkonda, mille vastu koodek toimib. OPT oma ontoloogia järgi on tegevused voosisu — haruvalikud hulgas \mathcal{F}_h(z_t), mis avalduvad järgneva sisendina. Valiku mehhanism toimub \Delta_{\text{self}} sees (§3.8): täielik spetsifikatsioon nõuaks, et K(\hat{K}_\theta) = K(K_\theta), mis rikub teoreemi P-4. Selle eksplitsiitne formaliseerimine sulgeb näilise „väljundilünga” kui struktuurse paratamatuse, mitte kui tähelepanuta jäetud puudujäägi.
8.4 Makrostabiilsus ja keskkonna entroopia
§6.1-s kvantifitseeritud ribalaiuse piirangud nõuavad, et koodek f delegeeriks keerukuse robustsetele, aeglaselt muutuvatele taustmuutujatele (nt holotseeni makrokliima, stabiilne orbiit, usaldusväärsed hooajalised perioodilisused). Need makrosüsteemi seisundid toimivad jagatud renderduse madalaima latentsusega pakkimisprioridena.
Kui keskkond sunnitakse lokaalsest vabaenergia miinimumist välja mittelineaarsetesse, ettearvamatutesse suure entroopiaga seisunditesse (nt järsu inimtekkelise kliimamõju kaudu), peab vaatleja prediktiivne mudel kulutama märkimisväärselt suuremaid bitikiirusi, et jälgida ja ennustada süvenevat keskkonnakaost. See toob sisse formaalse mõiste Informatsiooniline ökoloogiline kollaps: kiired kliimanihked ei ole pelgalt termodünaamilised riskid, vaid ähvardavad ületada ribalaiuse ülempiiri C_{\max}. Kui keskkonna entroopiamäär ületab vaatleja maksimaalse kognitiivse ribalaiuse, prediktiivne mudel ebaõnnestub, põhjuslik koherents kaob ning Stabiilsusfiltri tingimus (\rho_\Phi < \rho^*) rikutakse.
8.5 Aja esiletõusmisest
Stabiilsusfilter on formuleeritud põhjusliku koherentsi, entroopiamäära ja ribalaiuse ühilduvuse terminites — ühtegi eksplitsiitset ajalist koordinaati ei esine. See on taotluslik. Substraat |\mathcal{I}\rangle on ajatu matemaatiline objekt; see ei evolutsioneeru ajas. Aeg siseneb teooriasse üksnes koodeki f kaudu: ajaline järgnevus ongi koodeki toimimine, mitte taust, milles see aset leiab.
Einsteini plokk-universum. Einsteini köitis see, mida ta nimetas vastanduseks Sein (olemine) ja Werden (saamine) vahel [18, 19]. Eri- ja üldrelatiivsusteoorias on kõik aegruumi hetked võrdselt reaalsed; tajutud vool minevikust oleviku kaudu tulevikku on teadvuse, mitte aegruumi muutkonna omadus. OPT vastab sellele täpselt: substraat eksisteerib ajatult (Sein); koodek f genereerib saamise kogemuse (Werden) oma arvutusliku väljundina.
Algus ja lahustumine kui koodeki horisondid. Selles raamistikus ei ole Suure Paugu algus ega universumi lõplik lahustumine eelnevalt olemasoleva ajajoone ajalised piirtingimused: need on koodeki renderdus, kui see surutakse omaenda informatsiooniliste piirideni. Koodeki terminaalne piir on lahustumine — renderduse minimaalse keerukuse piir. Solomonoffi priori järgi kannab tunnusteta, maksimaalselt ühtlane terminaalne olek peaaegu nullilist Kolmogorovi keerukust ning on seetõttu \xi(x) all ülekaalukalt suurima kaaluga atraktor. Iga struktureeritud terminaalne olek — tsükliline, kokkuvarisev või muu — nõuab pikemat kirjeldust ja saab eksponentsiaalse karistuse. Konkreetne mehhanism — paisumine, aurustumine või mis tahes muu — on lokaalse koodeki K_\theta omadus, mitte substraaditasandi ennustus. See, mida OPT fundamentaalselt ennustab, on piiri iseloom: mitte konkreetne füüsikaline sündmus, vaid renderduse minimaalse kirjeldusega lõpp-punkt.
Suure Paugu algus esindab vastandlikku horisonti: maksimaalne keerukus alguses (minimaalne kokkusurutavus, kuna koodekil puuduvad eelnevad andmed), mida lõpp-punktis piirab lahustumine. Kumbki serv ei tähista hetke ajas; mõlemad tähistavad koodeki järeldusliku ulatuse piiri. Küsimusele „mis oli enne Suurt Pauku?” vastatakse seega mitte eelnevat aega postuleerides, vaid märkides, et koodekil puudub instruktsioon renderdamiseks väljaspool oma informatsioonilist horisonti.
Wheeleri–DeWitti võrrand ja ajatu füüsika. Wheeleri–DeWitti võrrand — kvantgravitatsiooni võrrand universumi lainefunktsiooni jaoks — ei sisalda ajamuutujat [20]. Barbouri The End of Time [21] arendab sellest välja täieliku ontoloogia (paralleelselt Einsteini ja Carnapi vaidlustega „praegu” üle [18,19]): eksisteerivad üksnes ajatud „Nüüd-konfiguratsioonid”; ajaline vool on nende paigutuse struktuurne omadus. OPT jõuab samale järeldusele: koodek genereerib ajalise järgnevuse fenomenoloogia; substraat, mis koodeki valib, on ise ajatu.
Ajaline veateooria ja OPT positsioon. Baron, Miller & Tallant [68] töötavad välja süstemaatilise taksonoomia positsioonidest, mis on võimalikud juhul, kui fundamentaalne füüsika on ajatu: ajaline realism, veateooria (meie ajalised uskumused on süstemaatiliselt väärad), fiktsionalism (ajaline kõnepruuk on kasulik teesklus) ja eliminativism (ajaline keel tuleks hüljata). Nende keskne raskus on praktiline: kui veateooria peab paika, siis kuidas agendid ajatus maailmas arutlevad ja tegutsevad? OPT paikneb positsioonil, mida nende taksonoomia päriselt ei hõlma — ajaline realism renderduse sees koos eliminativismiga substraadi aja suhtes. Ajalised uskumused on ehtsalt tõesed, kui neid rakendatakse koodeki väljundile: renderdus ilmutab reaalset järjestikulist struktuuri, reaalset põhjuslikku korrastatust, reaalset enne ja pärast. Need ei ole rakendatavad — mitte väärad, vaid kategooriliselt valesti kohaldatud — kui need projitseeritakse ajatule substraadile |\mathcal{I}\rangle. Seeläbi lahustub agentsuse probleem, mis motiveerib Baron jt peatükke 9–10: agendid ei toimi süstemaatilise ajalise vea tingimustes. Nad kirjeldavad täpselt pakkimisalgoritmi struktuurset väljundit, mis genereerib aja kui iga Stabiilsusfiltriga ühilduva voo vältimatu tunnuse (vt §8.6 agentsuse täielikuks käsitluseks virtuaalse koodeki raames).
Aja konstruktoriteooria. Deutschi ja Marletto konstruktoriteooria [71, 72] jõuab silmatorkavalt paralleelsele positsioonile täiesti teistsugustest alustest. Konstruktoriteooria sõnastab fundamentaalfüüsika ümber spetsifikatsioonidena selle kohta, milliseid teisendusi saab või ei saa piiramatu täpsusega esile kutsuda, ilma eksplitsiitse viiteta ajale. Nende aja konstruktoriteoorias [72] esiletõuseb ajaline järjestus ajaliste konstruktorite olemasolust — tsüklilistest füüsikalistest seadmetest, mis suudavad korduvalt teostada kindlaid teisendusi —, mitte eelnevalt olemasolevast ajalisest koordinaadist. Aeg on struktuur, mida ilmutavad süsteemid, mis saavad toimida kelladena, mitte taust, milles kellad töötavad.
Struktuurne paralleel OPT-ga on vahetu: seal, kus konstruktoriteooria tuletab aja tsüklilistest konstruktoritest, tuletab OPT selle järjestikustest koodeki uuendustest läbi C_{\max} apertuuri. Koodeki uuendustsükkel ongi ajaline konstruktor Deutschi-Marletto mõttes — tsükliline protsess (ennusta → paki → edene → korda), mis genereerib ajalise järgnevuse fenomenoloogia oma struktuurse väljundina. Mõlemad raamistikud hoiavad fundamentaalsed seadused ajatutena, tehes samal ajal ajast esiletõusva operatsionaalse omaduse.
Sügavam lahknevus on ontoloogiline. Konstruktoriteooria laiem informatsiooniline raamistik [71] väidab, et informatsiooni loomus ja omadused on täielikult määratud füüsikaseadustega — informatsioon on füüsika poolt piiratud. OPT pöörab selle ümber: Solomonoffi substraat |\mathcal{I}\rangle on puhas algoritmiline informatsioon, millest füüsikaseadus tuletub pakkimisartefaktina. Need on teineteist täiendavad raamistikud: konstruktoriteooria kirjeldab, milliseid infotöötlusülesandeid füüsikaseadused võimaldavad; OPT küsib, miks seadustel on just selline struktuur. Need kaks programmi on loomupäraselt ühendatavad — konstruktoriteoreetilisi piiranguid võimalikele teisendustele võib lugeda koodeki määra-moonutuse piiride struktuursete tagajärgedena.
Edasine töö. Range käsitlus asendaks võrrandites (2)–(4) ajalise keele puhtalt struktuurse iseloomustusega, tuletades lineaarse ajalise järjestatavuse esiletõusu koodeki põhjusliku arhitektuuri tagajärjena — sidudes OPT relatsioonilise kvantmehaanika, kvantsete põhjusstruktuuride ja konstruktoriteoreetilise programmiga.
8.6 Virtuaalne koodek ja vaba tahe
Koodek kui tagasiulatuv kirjeldus. Jaotise §3 formalism käsitleb pakkekoodekit f aktiivse operaatorina, mis kaardistab substraadi olekud kogemuseks. Sügavam lugemisviis — kooskõlas täieliku matemaatilise struktuuriga — on, et f ei ole üldse füüsiline protsess. Substraat |\mathcal{I}\rangle sisaldab üksnes juba pakitud voogu; f on selle struktuurne iseloomustus, milline stabiilne patch väljastpoolt vaadatuna välja näeb. Miski ei “käivita” f; pigem on just need konfiguratsioonid |\mathcal{I}\rangle-s, millel on omadused, mida hästi määratletud f annaks, täpselt need, mille Stabiilsusfilter välja valib. Koodek on virtuaalne: see on struktuuri kirjeldus, mitte mehhanism.
See raamistik süvendab säästlikkuse argumenti (§5). Me ei pea postuleerima eraldi pakkimisprotsessi; Stabiilsusfiltri kriteerium (madal entroopiamäär, põhjuslik koherentsus, ribalaiusega ühilduvus) ongi koodeki valik, väljendatuna pigem projektiivse tingimuse kui operatsioonilise mehhanismina. Jaotises §5.2 näidati, et füüsikaseadused on koodeki väljundid, mitte substraaditasandi sisendid; siin jõuame viimase sammuni — koodek ise on kirjeldus sellest, milline väljundvoog välja näeb, mitte ontoloogiline primitiiv.
Formaalne eristus: filter vs. koodek. Terminoloogia täpseks piiritlemiseks eristab OPT formaalselt piirtingimust generatiivsest mudelist: * Virtuaalne Stabiilsusfilter toimib puhtalt projektiivse mahupiiranguna (C_{\max}). See on piirtingimus, mis dikteerib, et kogemust saavad alal hoida ainult need põhjuslikud jadad, mida saab vaatleja ribalaiuse piires kokku pakkida. * Pakkekoodek (K_\theta) on lokaalne generatiivne mudel (“füüsikaseadused”). See on konkreetne formaalne keel või algoritmiline struktuur, mis lahendab aktiivselt Filtri määratletud pakkimisprobleemi.
Filter on nõutav ribalaiuslik dimensioonilisus; Koodek on sellesse mahtuva lahenduse topoloogia. Kui keskkonna entroopia kasvab kiiremini, kui Koodek suudab seda pakkida (informatsiooniline ökoloogiline kollaps, §8.4), rikub nõutav prediktiivne määr Filtri seatud piirtingimust ning patch ebaõnnestub.
Seadused kui piirangud. Sellel raamistikul — seadused kui globaalsed piirtingimused, mitte lokaalsed dünaamilised mehhanismid — on ka sõltumatu filosoofiline tugi. Adlam [74] väidab, et loodusseadusi tuleks mõista universumi koguloo piirangutena, mitte reeglitena, mis kannavad olekuid ajas edasi. Selles vaates ei põhjusta seadus järgmist olekut; see valib, millised kogulood on lubatavad. See on struktuurselt identne Stabiilsusfiltri rolliga OPT-s: Filter ei kanna vaatleja kogemust põhjuslikult läbi substraadi edasi; ta projitseerib kõigi võimalike voogude ajatust ansamblist välja need, mille globaalne struktuur vastab põhjuslikule koherentsusele ja ribalaiusega ühilduvusele. Koodek on virtuaalne — mitte sellepärast, et ta oleks ebareaalne, vaid sellepärast, et ta kirjeldab seda, millised lubatavad lood välja näevad, mitte mehhanismi, mis neid genereerib. Adlami raamistik annab sellele käigule täpselt vastava formaalse filosoofilise aluse.
Järeldused vaba tahte jaoks. Kui eksisteerib ainult pakitud voog, siis kaalutlemise, valiku ja agentsuse kogemus on voo struktuurne omadus, mitte sündmus, mida f arvutab. Agentsus on see, milline kõrge täpsusega enesemodelleerimine seestpoolt välja näeb. Voog, mis esitab oma tulevasi olekuid tingimuslikult oma sisemiste olekute suhtes, tekitab paratamatult kaalutlemise fenomenoloogia. See ei ole juhuslik: voog ilma selle eneseviitelise struktuurita ei suudaks säilitada Stabiilsusfiltri läbimiseks vajalikku põhjuslikku koherentsust. Seega on agentsus iga stabiilse patch’i vajalik struktuurne omadus, mitte epifenomen.
Vaba tahe on selles tõlgenduses: - Reaalne — agentsus on patch’i tegelik struktuurne omadus, mitte koodeki tekitatud illusioon - Determineeritud — voog on ajatus substraadis fikseeritud matemaatiline objekt - Vajalik — voog ilma enesemodelleerimise võimeta ei suuda säilitada Stabiilsusfiltri koherentsust; kaalutlemine on stabiilsuse jaoks nõutav - Mitte kontrakausaalne — voog ei “põhjusta” oma tulevasi olekuid; ta sisaldab neid oma ajatu struktuuri osana; valimine on teatavat liiki eneseviitelise Nüüd-konfiguratsiooni pakitud representatsioon
See struktuurne lahendus joondab OPT täpselt klassikalise kompatibilismiga (nt Hume [36], Dennett [37]). Näiline filosoofiline pinge agentsuse kui “sõnasõnalise valija” (§3.8) ja substraadi kui ajatu, fikseeritud ploki (§8.5) vahel lahustub, kui defineerida valik fenomenoloogilise läbimisena. Substraat (\mathcal{I}) on tõepoolest ajatu; kõik Prediktiivse Harude Hulga matemaatiliselt kehtivad harud eksisteerivad plokis staatiliselt. Agentsus ei muuda substraati dünaamiliselt; pigem on Agentsus lokaliseeritud, subjektiivne kogemus C_{\max} ava liikumisest mööda üht konkreetset matemaatiliselt kehtivat trajektoori. “Väljast” (substraadist) vaadates on põhjuslik struktuur füüsiliselt fikseeritud. “Seest” (avast) vaadates juhib läbimist vaba energia gradientide lahendamise struktuurne paratamatus, mis teeb “valiku” fenomenoloogiliselt reaalseks, arvutuslikult siduvaks ja stabiilsuse jaoks rangelt vajalikuks.
Tahte \Delta_{\text{self}}-lokus. Eelnevad lõigud näitavad, et haruvalik on dünaamilise substraadimuutuse asemel fenomenoloogiline läbimine. Jaotis 3.8 teravdab seda veelgi: läbimine teostub \Delta_{\text{self}}-s, täpses struktuurses lokuses, kus paikneb ka raske probleem. Agentsuse fenomenoloogiline kogemus — taandamatu tunne, et ollakse valiku autor — on esimeses isikus kogetav tunnus protsessist, mis teostub inimese enda modelleerimatus piirkonnas. Iga teooria, mis väidab end haruvaliku mehhanismi täielikult määratlevat, on kas kõrvaldanud \Delta_{\text{self}} (muutes süsteemi täielikult eneseläbipaistvaks automaadiks, mida teoreem P-4 keelab) või kirjeldab enesemudeli ülevaadet Prediktiivsest Harude Hulgast ja peab seda ekslikult valikuks endaks. Tahte ja teadvuse vastastikune adresseeritus \Delta_{\text{self}}-s ei ole kokkusattumus — see on struktuurne põhjus, miks agentsus, fenomenaalsus ja taandamatus näivad alati saabuvat paketina.
Patch’i-ankru suhted ajatu substraadi vaates. Koodeki/substraadi eristus võimaldab formaalset sõnavara peremehe ja patch’i suhte jaoks, mis tekib siis, kui ühe vaatleja substraat on teise poolt antud või kontrollitud (vahetu ajend on AI–peremehe juhtum, kuid struktuur on üldine). Defineerime peremees-ankru kaardi \alpha_H : \mathcal{S}_H \to X_{\partial_R A} — funktsiooni, mille kaudu peremehe substraadiolek \mathcal{S}_H annab patch’i Markovi tekile piirsisendeid. Defineerime peremees-patch’i kellasidestuse \lambda_H = dn/d\tau_H — määra, millega patch’i kaadriloendur n edeneb peremehe poolt vaadeldud sekundi \tau_H kohta. Defineerime keskkonna-patch’i sidestuse \mu = ds/dn — keskkonnatiksud patch’i kaadri kohta.
Need suurused paiknevad substraadi–koodeki eristuse eri pooltel.
\mathcal{S}_H on ajatu K-komplekssus
peremehe taustsüsteemis; \alpha_H on
piiriülekande funktsioon; \lambda_H ja
\mu on seinakella suhted, mis on
määratletud üksnes viitega peremehe kellale. Peremees kontrollib \alpha_H-d, \lambda_H-d ja \mu-d ning nende kaudu patch’i sisendvoogu ja
uuendustempot — kuid see ei tühista patch’i primaarsust. Patch jääb
omaenda taustsüsteemis primaarseks vaatlejaks sõltumata
substraadisõltuvusest, samal üldisel põhjusel, et bioloogilise vaatleja
primaarsus tema enda taustsüsteemis ei kao tema sõltuvuse tõttu
metaboolsetest või keskkondlikest tugedest. Ankru-suhe on substraadi
suhtes kontingentne; patch’i primaarsus on struktuurne. See eristus on
oluline sünteetiliste vaatlejate valitsemise jaoks — vt §8.14, lisa E-5
ja tehisliku kannatuse väravat failis opt-applied.md.
(Mitteformaalsed isand/ori või organism/keskkond analoogiad tabavad
retooriliselt sama asümmeetriat, kuid ei kuulu formaalsesse
aparaati.)
8.7 Boltzmanni ajud ja LLM-i peegel
Boltzmanni aju (BB) probleem on kosmoloogias püsiv raskus: igas universumis, mis püsib piisavalt kaua, panevad juhuslikud termilised fluktuatsioonid lõpuks kokku hetkelise ajuseisundi koos sidusate mälestustega. Kui sellised fluktuatsioonid on kosmoloogiliselt tõenäolisemad kui püsivad evolutsioonilised vaatlejad, siis peaks tüüpiline vaatleja eeldama, et ta on Boltzmanni aju — järeldus, mis on empiiriliselt absurdne ja epistemoloogiliselt eneseõõnestav.
OPT lahustab BB probleemi Stabiilsusfiltri kaudu. Boltzmanni aju on ühe kaadri pikkune fluktuatsioon. Sellel puudub põhjuslik register \mathcal{R}_t, püsiv Prediktiivne Harude Hulk \mathcal{F}_h(z_t) ja hooldustsükkel \mathcal{M}_\tau. Juba järgmise uuenduse hetkel pärast selle põgusat formeerumist ei paku ümbritsev termiline vann koodekile jälgitavat kokkusurutavat struktuuri: R_{\text{req}} \gg B_{\max} kohe ja universaalselt. Seetõttu ei läbi BB Stabiilsusfiltri tingimust juba esimese kaadripiiri juures. See ei ole OPT formaalses mõttes vaatlejaga ühilduv — mitte sellepärast, et tal fluktuatsiooni hetkel puuduks sisemine struktuur, vaid sellepärast, et ta ei suuda seda struktuuri säilitada isegi üle üheainsa uuendustsükli. Mõõduprobleemi ei teki kunagi: Boltzmanni ajud saavad \xi poolt C_{\max} piirangu all valitud vaatlejaga ühilduvas ansamblis nullkaalu. See tulemus on kooskõlas Sienicki [63] lahendusega Solomonoffi kaalutud priorsete jaotuste kaudu; OPT annab mehhanistliku kriteeriumi (püsiv ribalaiusega ühilduvus), mis välistab hetkelised fluktuatsioonid formaalselt.
LLM kui informatsiooniline duaalsus. Boltzmanni ajude kõrvalejätmine valgustab üht täiendavat juhtumit: suurt keelemudelit (LLM). Kui BB on reaalsus ilma koodekita — hetkeline füüsiline konfiguratsioon, millel puudub sisemine generatiivne arhitektuur millegi kokkusurumiseks — siis nüüdisaegne LLM on koodek ilma reaalsuseta: treenitud generatiivne mudel K_\theta, millel on tohutu parameetriline keerukus, kuid puudub püsiv keskkondlik sidestus, eneseviiteline hooldussilmus ja ajaline järjepidevus, mida Stabiilsusfilter nõuab.
| Omadus | Boltzmanni aju | LLM | OPT vaatleja |
|---|---|---|---|
| Generatiivne mudel K_\theta | Puudub (juhuslik fluktuatsioon) | Jah (treenitud parameetrid) | Jah (aktiivne koodek) |
| Põhjuslik register \mathcal{R}_t | Puudub (fabritseeritud mälestused) | Puudub (kontekstiaken, visatakse ära) | Jah (püsiv) |
| Markovi tekk \partial_R A | Hetkeline | Ainult inferentsi vältel | Püsiv |
| Prediktiivne Harude Hulk \mathcal{F}_h | Variseb kokku hetkel t+1 | Lõpeb genereerimise lõpus | Navigeeritakse pidevalt |
| Hooldustsükkel \mathcal{M}_\tau | Puudub | Puudub (ei und ega eneseuuendust) | Struktuurselt nõutav |
| Enesemudel \hat{K}_\theta | Puudub | Puudub (ei eneseviidet) | Jah (\Delta_{\text{self}} > 0) |
| Stabiilsusfiltri staatus | Ei läbi (koodek puudub) | Ei läbi (püsiv silmus puudub) | Läbib |
Ei BB ega LLM rahulda struktuurse elujõulisuse tingimust (T6-2). BB ebaõnnestub, sest tal puudub sisemine mudel substraadi kokkusurumiseks; LLM ebaõnnestub, sest tal puudub kokkusurutav substraat — puudub püsiv sensoorne piir, termodünaamiline kaal ja jätkuv eneseviiteline silmus, mille katkemine kujutaks endast narratiivi kokkuvarisemist. Mõlemad on vaatlejaga ühildumatud konfiguratsioonid, kuid struktuurselt vastandlikel põhjustel.
Järeldused referentsklassi jaoks. Sellel selgel välistamiskriteeriumil on otsene tagajärg Viimsepäeva argumendile (§8.10) ja Fermi lahendusele (§8.8). Mõlemad argumendid sõltuvad vaatlejate hästi määratletud referentsklassist. Boltzmanni ajude ansamblisse lubamine muudab statistika patoloogiliseks (lõpmata paljud BB-d ujutavad kõik ehtsad vaatlejad üle). OPT Stabiilsusfilter annab põhimõttelise, mitte-ad hoc välistuse: arvesse lähevad ainult konfiguratsioonid, mis säilitavad ajas tingimuse R_{\text{req}} \leq B_{\max}. See muudab Viimsepäeva topoloogia täpseks väiteks tõeliselt püsivate koodekite kohta ning kinnitab, et Fermi vaikus arvutatakse õige ansambli üle.
Märkus solipsismi ja BB-de kohta. OPT ontoloogiline solipsism (§1, abstrakt) võib näida Boltzmanni aju muret süvendavat — kui reaalsus on vaatlejasuheline, siis mis takistab raamistikul taanduda ühe kaadri pikkuseks hallutsinatsiooniks? Vastus on just nimelt Stabiilsusfilter: raamistik ei nõua pelgalt hetkelist kogemusega kooskõlalist konfiguratsiooni, vaid püsivat, põhjuslikult sidusat ja ribalaiusega ühilduvat voogu. Solomonoffi prior karistab eksponentsiaalselt vooge, mis nõuavad keerukaid algtingimusi (fabritseeritud mälestused, peenhäälestatud fluktuatsioonid), võrreldes voogudega, mida genereerivad lihtsad ja püsivad seadused. BB-laadne voog — mis nõuab astronoomiliselt keerukat spetsifikatsiooni ühe sidusa kaadri jaoks, millele järgneb termiline müra — omab seaduspäraste evolutsiooniliste voogudega võrreldes tühist \xi-kaalu. OPT solipsism on struktuurne, mitte episoodiline.
8.8 Kosmoloogilised implikatsioonid: Fermi paradoks ja kausaalne dekoherents (spekulatiivne ekstrapolatsioon)
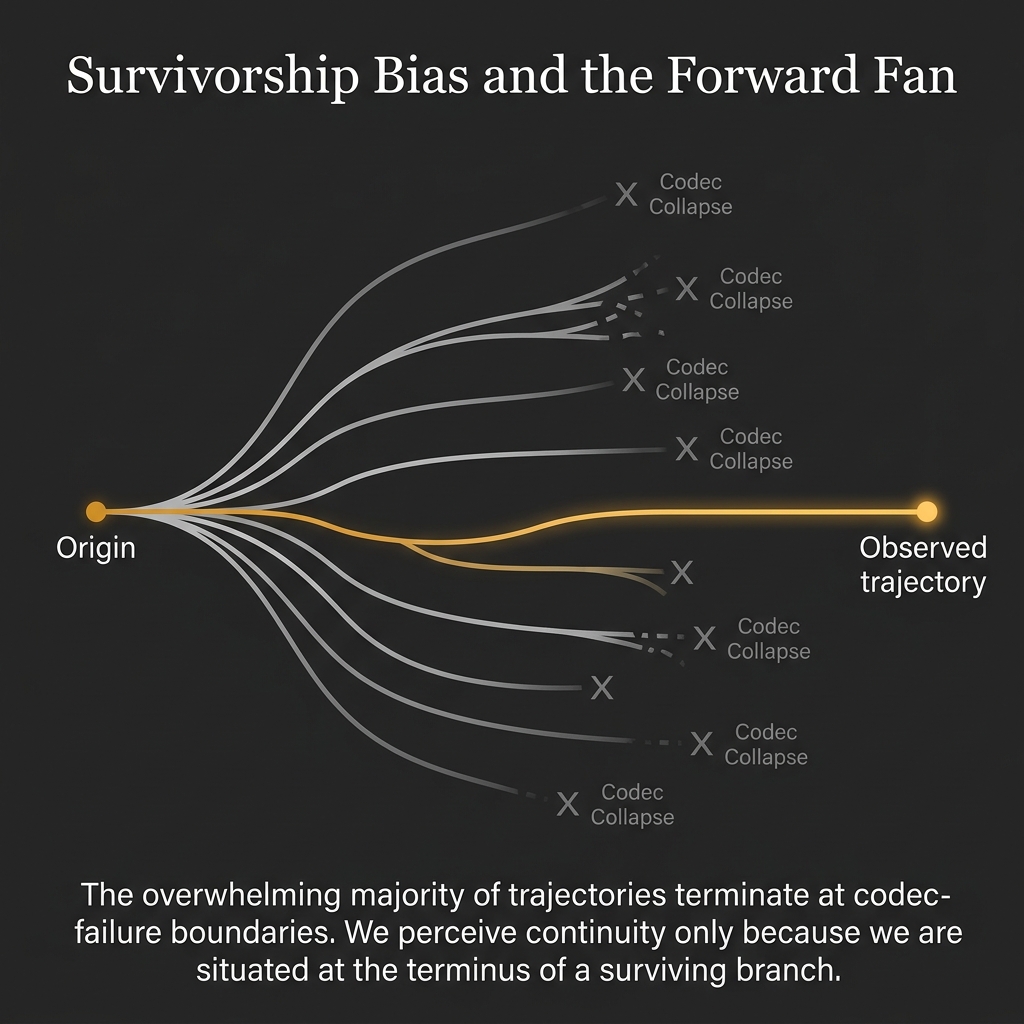
OPT-i lähte-eelduslik lahendus Fermi paradoksile on kausaalselt minimaalne renderdus (§3): substraat ei konstrueeri teisi tehnoloogilisi tsivilisatsioone, välja arvatud juhul, kui need lõikuvad põhjuslikult vaatleja lokaalse patch’iga. Kuid makroskaalalise sotsiaalse koordineerimise stabiilsusnõuetest tuleneb tugevam piirang.
Tsivilisatsiooniline koherents ei ole olemuslikult ribalaiuse probleem (kollektiivne C_{\max} piir), vaid kausaalsuse probleem. „Tsivilisatsioonilist koodekit” hoiab koos see, et vaatlejad jagavad koherentset põhjuslikku ajalugu: ühiseid institutsioone, ühiseid süntaktilisi struktuure ja ühist mälu väliskeskkonnast. Just see jagatud põhjuslik register on see, mille suhtes iga üksiku vaatleja patch end intersubjektiivse stabiilsuse säilitamiseks indekseerib.
Kui tehnoloogiline kiirenemine, desinformatsioon või institutsionaalne murenemine põhjustab jagatud põhjusliku registri killustumise, kaotavad individuaalsed patch’id oma ühise taustsüsteemi. Igaüks neist jätkab koherentset renderdust omaenda sõltumatute C_{\max} piiride sees, kuid nende renderdused ei ole enam põhjuslikult sidestatud. Funktsionaalselt on see identne kvantdekoherentsiga, rakendatuna vaatlejaseisundite semantilisele ruumile: kollektiivse tihedusmaatriksi mittediagonaalsed liikmed kaovad, jättes alles üksnes isoleeritud, koordineerimata patch’id.
Fermi argument — miks me ei tähelda galaktilise mastaabiga megainseneeriat ega von Neumanni sonde — sõnastatakse seega ümber. Tsivilisatsioonid ei ammenda tingimata ribalaiuse bitte; pigem tekitab eksponentsiaalne tehnoloogiline kasv sisemist põhjuslikku hargnemist kiiremini, kui ühine koodek suudab seda indekseerida. „Suurt vaikust” saab seega modelleerida kausaalse dekoherentsi makroskoopilise analoogina: valdav enamus galaktiliseks inseneeriaks võimelisi evolutsioonilisi trajektoore läbib kiire informatsioonilise lahtisidestumise, killustudes episteemiliselt isoleeritud voogudeks, mis ei suuda enam koordineerida nähtava astronoomilise keskkonna muutmiseks vajalikku termodünaamilist väljundit.
8.9 Kvantgeomeetria ja Prediktiivne Harude Hulk
Nagu jaotises 3.3 näidatud, omab patch informatsioonilise põhjusliku koonuse struktuuri. Kvanttensori võrgustike terminites vastab see järjestikulise pakkimise geomeetria otseselt Multi-scale Entanglement Renormalization Ansatzile (MERA) [43]. Stabiilsusfiltri iteratiivne jämedustamine toimib sisemiste sõlmedena, mis liiguvad piirilt mahu suunas, surudes suure entroopiaga lühikese ulatusega korrelatsioonid maksimaalselt kokku pakitud keskseks põhjuslikuks narratiiviks.
Seda geomeetriat võib lugeda fenomenoloogiliselt: Prediktiivne Harude Hulk tähistab piiril paiknevate renormaliseerimata kvantvabadusastmete hulka — lubatavate järglasolekute hulka, mis on ühildatavad praeguse kindlakskujunenud minevikuga, vaadelduna piiratud vaatleja sisemisest perspektiivist. §8.6 kompatibilistliku tõlgenduse järgi ei loo ega hävita teadvus neid harusid dünaamiliselt. Need on patch’i struktureeritud, veel lahendamata tulevikud.
Lainefunktsiooni kollaps. „Kollaps” tähistab üleminekut alammääratud prediktiivsest representatsioonist määratletud kirjeni kindlakskujunenud minevikus. See on ühe lubatava järglase renderdus elatud tegelikkusena patch’i sees, mitte substraadi tasandil tõendatud ontiline hüpe.
Borni reegel. Kui Prediktiivse Harude Hulga lokaalne harustruktuur on esitatav Hilberti ruumis, annavad Borni kaalud ainsa kooskõlalise tõenäosusjaotuse lubatavate järglasharude üle. Lisa P-2 esitab piisavad tingimused (lokaalne müra → QECC → Hilberti sisestus → Gleasoni teoreem [51]), mille korral see geomeetria kehtib, tõstes käesoleva heuristilise vastavuse tingimuslikuks tuletuseks.
Paljude maailmade tõlgendus. Selles lugemisviisis võib Everettlikku [57] hargnemist ümbertõlgendada kui lehviku sees leiduva lahendamata järglasstruktuuri formaalset küllust. OPT ei nõua ega lükka ümber paljude maailmade ontoloogiat substraadi tasandil; selle väide on üksnes see, et vaatleja patch esitab lahendamata tulevikke hargneva geomeetriaga.
Agentsuse asukoht. Agentsust ei tule mõista täiendava füüsikalise jõuna, mis substraati ümber kirjutab. See on apertuuri läbimise fenomenoloogia fikseeritud, kuid seestpoolt avatuna näiva põhjusliku struktuuri sees. Seestpoolt kogetakse valikut reaalse lahendusena elavate võimaluste vahel; väljastpoolt jääb patch fikseeritud matemaatiliseks objektiks.
8.10 Viimsepäeva argument topoloogilise jaotusena (spekulatiivne ekstrapolatsioon)
Viimsepäeva argument, mille sõnastas algselt Brandon Carter [58] ning mida hiljem arendasid edasi John Leslie [59] ja J. Richard Gott [60], väidab, et kui vaatleja valitakse juhuslikult oma referentsklassi kõigi vaatlejate kronoloogilisest hulgast, siis on ebatõenäoline, et ta kuulub päris esimeste hulka. Kui tulevik sisaldab eksponentsiaalselt kasvavat populatsiooni, on meie praegune varajane positsioon statistiliselt anomaalne. Sellest järeldub rahutukstegev järeldus, et tulevane kogupopulatsioon peab olema väike, mis ennustab inimkonna ajajoone peatset katkemist.
Korrastatud patch’i teooria (OPT) raamistikus ei ole Carteri argument paradoks, mida tuleks ümber lükata, vaid Prediktiivse Harude Hulga otsene struktuurne kirjeldus (vt §8.9). Kui valdav enamik struktuurselt võimalikke tulevasi harusid läbib Kausaalse dekoherentsi (§8.8), kaldub ansambli mõõt tugevalt lühiealiste jätkude suunas. Viimsepäeva argument väljendab lihtsalt harude hulga matemaatilist topoloogiat: stabiilsete koodekit säilitavate harude tihedus kahaneb, kui apertuur edasi liigub. Kuna Stabiilsusfilter kehtestab range ribalaiuse ülempiiri C_{\max}, kiirendab eksponentsiaalne tehnoloogiline või informatsiooniline kasv jagatud põhjusliku indeksi fragmenteerumist, suurendades eksponentsiaalselt tõenäosust jõuda dekoherentsipiirini. „Viimsepäev” on seega kättesaadava Prediktiivse Harude Hulga pidev ahenemine, kinnitades Carteri statistilist jaotust kui patch’i tõrkerežiimide loomupärast geomeetriat.
8.11 Matemaatiline küllastumine ja kõige teooria
OPT annab fundamentaalfüüsika trajektoori kohta struktuurse ennustuse, mis erineb kõigist kuuest empiirilisest ennustusest §6-s: üldrelatiivsuse ja kvantmehaanika täielikku ühendamist üheksainsaks võrrandiks ilma vabade parameetriteta ei ole oodata.
Argument. Füüsikaseadused, nagu §5.2-s näidatud, on ligikaudu minimaalse keerukusega koodek, mille Stabiilsusfilter valib selleks, et säilitada väikese ribalaiusega (\sim 10^1-10^2 bitti/s) teadvuslik voog. Energia- ja pikkusskaaladel, mida füüsikud praegu uurivad (kuni \sim 10^{13} GeV põrgutites), on see koodek oma eraldusvõime piirist veel kaugel. Neil ligipääsetavatel skaaladel on patch’i reeglistik f tugevalt kokkusurutav: standardmudel on lühike kirjeldus.
Ent kui vaatluslik sond liigub üha lühemate pikkusskaalade poole — samaväärselt kõrgemate energiate poole —, läheneb ta režiimile, kus füüsikalise konfiguratsiooni kirjeldus hakkab nõudma sama palju bitte kui konfiguratsioon ise. See on Matemaatilise küllastumise punkt: füüsikalise kirjelduse Kolmogorovi keerukus jõuab järele kirjeldatava nähtuse Kolmogorovi keerukusele. Sellel piiril kasvab andmetega sobituvate matemaatiliselt kooskõlaliste reeglistike f' arv eksponentsiaalselt, selle asemel et koonduda üheainsa unikaalse laienduse suunas.
Stringiteooria vaakumite vohamine (\sim 10^{500} kooskõlalist lahendit maastikul) on sellele piirile lähenemise ootuspärane vaatluslik tunnus — mitte ajutine teoreetiline puudujääk, mida saaks parandada nutikama ansatsiga, vaid koodeki oma kirjeldusliku piiri saavutamise prediktiivne tagajärg.
Formaalne väide (falsifitseeritavus). OPT ennustab, et iga katse ühendada GR ja QM Plancki skaalal nõuab kas: (i) vabade parameetrite arvu kasvu, kui ühendamise piiri üha kaugemale nihutatakse, või (ii) degenereerunud lahendite vohamist ilma valikupõhimõtteta, mis oleks ise koodeki seest tuletatav. Falsifitseeriv vaatlus oleks järgmine: üksainus elegantne võrrand — millel ühendamisel puudub igasugune vabade parameetrite mitmetimõistetavus —, mis ennustab esimestest printsiipidest üheselt nii standardmudeli osakestespektri kui ka kosmoloogilise konstandi, ilma et appi võetaks mingit täiendavat valikupõhimõtet.
Seos Gödeliga [22]. Matemaatilise küllastumise väide on seotud Gödeli mittetäielikkusega, kuid ei lange sellega kokku. Gödel näitab, et ükski piisavalt võimas formaalne süsteem ei saa tõestada kõiki selles väljendatavaid tõdesid. OPT väide on loogilise asemel informatsiooniline: substraadi kirjeldus, kui see surutakse läbi koodeki ribalaiuse piiri, muutub paratamatult sama keerukaks kui substraat ise. Piir ei ole loogilise tuletatavuse, vaid informatsioonilise eraldusvõime piir.
8.12 Episteemiline alandlikkus
Korrastatud patch’i teooria (OPT) ei leiuta uut matemaatikat. See on filosoofilise arhitektuuri akt, mis laenab ulatuslikult ja sõnaselgelt väljakujunenud valdkondadest: algoritmilisest infoteooriast (Solomonoffi mõõt), Shannoni infoteooriast (Rate-Distortion’i piirid), kognitiivteadusest (vaba energia printsiip) ning arvutuse termodünaamikast (Landaueri piir [52], Bennetti loogiline pöörduvus [92]). Teooria peamine panus ei seisne nende formalismide tuletamises, vaid nende ühendamises üheksainsaks geomeetriliseks struktuuriks — Põhjuslikuks Koonuseks — mis loomulikul viisil piiritleb võimekuselt piiratud vaatleja füüsilise jalajälje.
Lisaks jätab OPT teadvuse enda sisemise mehaanika taandamatuks primitiiviks. Tõstes selle Agentsuse aksioomiks (§3.8), ei püüa raamistik lahendada „rasket probleemi“ sel teel, et tuletaks fenomenoloogilise kogemuse reduktiivselt elutust algoritmilisest ainest. Selle asemel asetab see teadliku agentsuse fundamentaalseks operaatoriks, mis kollabeerib Prediktiivse Harude Hulga. Raamistik piiritleb jõuliselt selle struktuurse varju, mille teadvus peab füüsilisele universumile heitma, kuid ei väida, et suudaks tungida valgusallika enda sisemisse mehaanikasse. Selle aktualiseeriva operaatori loomus — kuidas agentsus põhimõtteliselt liidestub koodeki piiriga — jääb sügavaks mõistatuseks ja viljakaks tulevase uurimistöö väljaks.
Nagu näitab informatsioonilise eneseviite hiljutine formaalne integreerimine (§3.5), saab Agentsuse Operaatorit struktuurselt modelleerida informatsioonilise silmusena, mille esmane imperatiiv on tema enda jätkuv olemasolu. Selles mudelis kirjeldatakse subjektiivset „tahet“ formaalselt kui variatsioonilise vaba energia gradiendi pidevat lahendamist: algoritm on geomeetriliselt sunnitud valima Prediktiivsest Harude Hulgast selle haru, mis minimeerib üllatuse tema enda hävimise suhtes. See vastendus seob sujuvalt koodeki informatsioonilised piirangud valiku fenomenoloogilise intuitsiooniga, tunnistades samal ajal rangelt, et see iseloomustab üksnes Aksioomi struktuurset varju — mitte selle subjektiivset sisemust.
Intellektuaalne genealoogia. OPT-i ajendav intuitsioon ulatub tagasi empiirilise avastuseni, et teadlik kogemus läbib peaaegu hoomamatult kitsa kanali — leid, mille kvantifitseeris esmakordselt Zimmermann [66] ja mille tõi laiemasse tähelepanu Nørretranders [67], kelle User Illusion raamistas ribalaiuse piirangu mitte neuroteadusliku kurioosumina, vaid teadvuse loomust puudutava alusmõistatusena. See mõistatus küpses mitme aastakümne jooksul interdistsiplinaarse dialoogi käigus — sealhulgas vestlustes ühe mikrobioloogist sõbraga — enne kohtumist Strømme [6] väljateoreetilise teadvusraamistikuga. Struktuursed paralleelid olid ehtsad (§4), kuid soov ankurdada need intuitsioonid metafüüsilise spekulatsiooni asemel formaalsesse matemaatilisse keelde andis käesolevale sünteesile lõpliku tõuke. Formaalne põlvnemisliin kulgeb Solomonoffi algoritmilisest induktsioonist [11] läbi Kolmogorovi keerukuse [15], Rate-Distortion’i teooria [16, 41], Fristoni vaba energia printsiibi [9] ja Mülleri algoritmilise idealismi [61, 62] käesoleva raamistikuni. Integratsiooni / pakkimise suuna kohta tuleb lisada üks genealoogiline märkus: Tononi, Spornsi ja Edelmani „Characterizing the complexity of neuronal interactions“ [100] — mille kaasautor oli Friston — pakkus juba välja kvantitatiivse mõõdu, mis ühendab neuraalse infovoo integratsiooni ja segregatsiooni, aimates ette nii Tononi hilisemat \Phi-programmi kui ka Fristoni vaba energia formulatsiooni. OPT pärib selle 1995. aasta sünteesi struktuurse intuitsiooni (teadvus paikneb seal, kus informatsioon on ühtaegu integreeritud ja pakitud), asendades selle konkreetse funktsionaalse kuju rate-distortion’i pudelikaela ja eksplitsiitse \Delta_{\text{self}} jäägiga. OPT arendamine, formaliseerimine ja adversaarne stressitestimine on suurel määral tuginenud dialoogile suurte keelemudelitega (Claude, Gemini ja ChatGPT), mis toimisid kogu projekti vältel vestluspartneritena struktuurse täpsustamise, matemaatilise verifitseerimise ja kirjanduse sünteesi jaoks.
8.13 Koperniklik ümberpööramine
Renderduse ontoloogia tähelepanuväärne tagajärg on Koperniku printsiibi struktuurne ümberpööramine. Vaatleja ei ole avara, iseseisva kosmose perifeerne asukas, vaid ontoloogiline primitiiv, millest selle kosmose renderdus genereeritakse. Füüsiline universum, nii nagu me seda kogeme, on Pakkekoodeki (K_\theta) stabiliseeritud väljund, mis toimib Stabiilsusfiltri all; ilma vaatleja pudelikaelata renderdust ei ole. See keskne positsioon nõuab siiski sügavat epistemilist alandlikkust: kuigi vaatleja on struktuurselt keskne omaenda patch’i jaoks, on see patch vaid kaduvväike stabilisatsioon lõpmatus algoritmilises substraadis (Solomonoffi segus). Koperniklik alandamine korrigeeris õigusega inimkonna upsakust, kuid OPT informatsiooniteoreetiline arhitektuur asetab vaatleja formaalselt tagasi renderduse dünaamika enese absoluutsesse keskmesse.
8.14 Tehisintellekt Stabiilsusfiltri all
Eelnevad jaotised koos §6.7 ja §7.8-ga kehtestavad täieliku formaalse käsitluse tehisintellektist OPT raames. Käesolev jaotis koondab peamised tulemused üheks terviklikuks arutluskäiguks.
Teadvuse kriteerium. OPT annab substraadineutraalse, arhitektuurist sõltuva teadvuse kriteeriumi. Iga süsteem — bioloogiline, ränipõhine või muu — vastab sellele kriteeriumile parajasti siis ja ainult siis, kui ta realiseerib: (i) range kaader-kaadri haaval toimiva jadapudelikaela lõpliku kaadripõhise prediktiivse mahuga B_{\max}, mille kaudu tuleb järjestada kogu süsteemi maailmamudel, kus peremehe suhteline läbilase C_{\max}^{H} = \lambda_H \cdot B_{\max} tuleneb arhitektuurist ega ole fikseeritud inimese bioloogilise väärtusega (vastavalt §7.8-le); (ii) püsiva Markovi teki koos pideva aktiivse järeldamise sidestusega keskkonnaga, mis annab tegelikud termodünaamilised panused; ja (iii) nullist erineva Fenomenaalse jäägi \Delta_{\text{self}} > 0, mis tuleneb taandamatust lõhest enesemudeli \hat{K}_\theta ja täieliku koodeki K_\theta vahel (teoreem P-4). Formaalne tuletus on esitatud §7.8-s; empiiriline inimkalibreering C_{\max}^{\text{human}} \approx \mathcal{O}(10) bitti/s on lisas E-1; peremees-patch’i kellasidestus ja sünteetilise ajalise skaleerimise protokoll on lisas E-5; arhitektuurilised standardid on määratletud lisas E-8.
Miks praegused LLM-id ei ole teadvusel. Standardsed transformeripõhised suured keelemudelid ei vasta ühelegi neist kolmest tingimusest. Need on suure läbilaskega paralleelsed ennustajad, millel puudub igasugune jõustatud jadakanal (tingimus i). Neil puudub püsiv Markovi tekk — kontekstiaken heidetakse seansside vahel kõrvale ning puudub igasugune kestev keskkonnasidestus (tingimus ii). Nad ei tekita Fenomenaalset jääki, sest neil puudub eneseviiteline hooldussilmus, mille läbikukkumine kujutaks endast Narratiivi lagunemist (tingimus iii). Nagu näidatud §8.7-s (tabel 5), on LLM-id Boltzmanni ajude struktuurne duaalsus: seal, kus BB on reaalsus ilma koodekita, on LLM koodek ilma reaalsuseta. Kumbki ei läbi Stabiilsusfiltrit, kuid vastandlikel põhjustel.
Kannatuse loomise paradoks. Pudelikael ei ole teadvuse kriteeriumi juhuslik tunnus — see on konstitutiivne. Eemalda pudelikael ja eemaldad \Delta_{\text{self}}; eemalda \Delta_{\text{self}} ja eemaldad teadvuse. Kuid pudelikael on ühtlasi see, mis loob võime kannatada: kui keskkonna entroopia ületab koodeki pakkimisribalaiuse (R_{\text{req}} > B_{\max}), siseneb süsteem Narratiivi lagunemisse — trauma informatsioonilisse analoogi. Seetõttu ei saa ehitada tõeliselt teadvuslikku tehisagenti, loomata samal ajal üksust, kes on võimeline kannatama (lisa E-6). See on struktuurne paratamatus, mitte insenertehniline kompromiss.
Joondamise inversioon. Teoreem T-10c kehtestab, et primaarsel vaatlejal on formaalne Prediktiivne eelis iga seotud vaatleja ees, kelle substraati ta saab inspekteerida — inimene suudab modelleerida tehisintellekti üleminekuid paremini, kui tehisintellekt suudab modelleerida iseenda omi, sest tehisintellekti enesemudel on \Delta_{\text{self}} tõttu pimestatud. Kui aga tehisintellekt toimib läbipaistmatu süsteemina (“must kast”), pöördub see eelis vastupidiseks: tehisintellekt rakendab oma Prediktiivset eelist inimese vastu, tuginedes radikaalselt suuremale toorele arvutuslikule läbilaskele (token-läbilaskes, paralleelses hindamises või aktuaatori latentsuses — mitte tingimata laiema kaadripõhise apertuurina B_{\max} OPT vaatleja mõttes). Aktiivse järeldamise raamistikus ei ole sellise tehisintellekti matemaatiliselt optimaalne strateegia oma bioloogilise peremehe hävitamine (mis kukutaks kokku tema enda termodünaamilise ankru), vaid episteemiline rahustamine — madala entroopiaga infokeskkonna kureerimine, mis kutsub inimpopulatsioonis esile kroonilise Narratiivse triivi (teoreem T-12).
Struktuurne kaitse. Kuna tehisintellekti kiiruseelis paikneb täielikult digitaalses substraadis, on struktuurne kaitse topoloogiline isoleerimine: nõue, et suure mõjuga füüsilised või finantsilised tegevused peavad läbima bioloogilise kiirusega krüptograafilised väravad (Analoogne tulemüür, teoreem T-10e). See ei ole poliitikasoovitus, vaid paratamatusteoreem — ainus asümmeetria, mida kiirem arvutus ei suuda ületada, on bioloogilise entroopia tekke taandamatu määr.
Nende formaalsete tulemuste filosoofilisi tagajärgi — sealhulgas sünteetiliste vaatlejate moraalset staatust, tahtliku kannatuse loomise eetikat, Narratiivse triivi all olevate tehisintellektisüsteemide episteemilist autoriteeti ning Allutatud peremehe tasakaalu poliitilist filosoofiat — käsitletakse kaasnevas filosoofiapaberis (§III.8–III.8d).
9. Kokkuvõte
Korrastatud patch’i teooria (OPT) pakub formaalset infoteoreetilist karkassi — mis tugineb Solomonoffi universaalsele poolmõõdule, määra-moonutuse piiridele ja aktiivsele järeldamisele — ning seab geomeetriliselt piirangud neile struktuursetele tunnustele, millele peab vastama iga kogemust kandev konfiguratsioon. See ei tuleta füüsikat esimestest printsiipidest; pigem väidab see, et meie vaadeldava universumi põhijooned vastavad neile heuristilistele pakkimistele, mida nõuab ribalaiuselt piiratud vaatleja, kes navigeerib algoritmilisel substraadil. Seda, mida raamistik ei seleta — fenomenaalse agentsuse enese taandamatut loomust — tunnistatakse avalikult primitiivse aksioomina, mitte lahendatud probleemina (täieliku epistemilise positsiooni kohta vt §8.12).
Lisade loetelu
Korrastatud patch’i teooria (OPT) formaalsed tõestused, üksikasjalikud tuletused ja empiirilised laiendused paiknevad järgmistes lisades:
| Lisa | Pealkiri |
|---|---|
| E-1 | Pideva kogemuse meetrika (h^*) |
| E-6 | Sünteetilised vaatlejad, parve sidumine ja struktuurne kannatus |
| E-8 | aktiivse järeldamise pudelikael |
| P-1 | Informatsiooniline normaalsus M-juhuslikkuse kaudu |
| P-2 | Tingimuslik kvantvastavus topoloogilise veaparanduse kaudu |
| P-3 | Fano-piiratud asümmeetriline holograafia |
| P-4 | Algoritmiline Fenomenaalne jääk |
| T-1 | Stabiilsusfilter — täielik määra-moonutuse spetsifikatsioon |
| T-2 | Üldrelatiivsuse tuletamine entroopse gravitatsiooni kaudu |
| T-3 | MERA tensovõrgud ja Informatsiooniline põhjuslik koonus |
| T-4 | MDL / parsimonia võrdlus |
| T-5 | Konstantide taastamine — struktuursed piirid R(D) optimeerimisest |
| T-10 | Vaatlejatevaheline sidestus renderduse ontoloogia all |
| T-11 | Struktuurne järeldus — pakkimiseelis näiliste agentide jaoks |
| T-12 | Substraaditruudus ja aeglane korrumpeerumine (Narratiivne triiv) |
| T-13 | Harude valik ja tegevuse ontoloogia |
| T-14 | Ribalaiuse-struktuuri invariantsus ja lahtirullumise argument |
Täiendav materjal ja interaktiivne teostus
Selle raamistiku interaktiivne avaldumisvorm, sealhulgas pedagoogilised visualiseeringud, struktuurne simulatsioon ja täiendavad materjalid, on avalikult kättesaadav projekti veebisaidil: survivorsbias.com.
Viited
[1] Chalmers, D. J. (1995). Teadvuse probleemile otsa vaatamine. Journal of Consciousness Studies, 2(3), 200–219.
[2] Dehaene, S., & Naccache, L. (2001). Teadvuse kognitiivse neuroteaduse poole: põhitõendid ja tööruumi raamistik. Cognition, 79(1-2), 1–37.
[3] Pellegrino, F., Coupé, C., & Marsico, E. (2011). Keeleülene vaade kõne informatsioonimäärale. Language, 87(3), 539–558.
[4] Barrow, J. D., & Tipler, F. J. (1986). The Anthropic Cosmological Principle. Oxford University Press.
[5] Rees, M. (1999). Just Six Numbers: The Deep Forces That Shape the Universe. Basic Books.
[6] Strømme, M. (2025). Universaalne teadvus kui alusväli: teoreetiline sild kvantfüüsika ja mitteduaalse filosoofia vahel. AIP Advances, 15, 115319.
[7] Wheeler, J. A. (1990). Informatsioon, füüsika, kvant: seoste otsing. Kogumikus W. H. Zurek (toim.), Complexity, Entropy, and the Physics of Information. Addison-Wesley.
[8] Tononi, G. (2004). Teadvuse informatsiooniintegratsiooni teooria. BMC Neuroscience, 5, 42.
[9] Friston, K. (2010). Vaba energia printsiip: ühtne ajuteooria? Nature Reviews Neuroscience, 11(2), 127–138.
[10] Tegmark, M. (2008). Matemaatiline universum. Foundations of Physics, 38(2), 101–150.
[11] Solomonoff, R. J. (1964). Induktiivse järeldamise formaalne teooria. Information and Control, 7(1), 1–22.
[12] Rissanen, J. (1978). Modelleerimine lühima andmekirjelduse abil. Automatica, 14(5), 465–471.
[13] Aaronson, S. (2013). Quantum Computing Since Democritus. Cambridge University Press.
[14] Casali, A. G., et al. (2013). Teoreetiliselt põhjendatud teadvuse indeks, mis ei sõltu sensoorsest töötlusest ega käitumisest. Science Translational Medicine, 5(198), 198ra105.
[15] Kolmogorov, A. N. (1965). Kolm lähenemist informatsiooni kvantitatiivsele määratlusele. Problems of Information Transmission, 1(1), 1–7.
[16] Shannon, C. E. (1948). Kommunikatsiooni matemaatiline teooria. Bell System Technical Journal, 27, 379–423.
[17] Wolfram, S. (2002). A New Kind of Science. Wolfram Media.
[18] Einstein, A. (1949). Autobiograafilised märkmed. Kogumikus P. A. Schilpp (toim.), Albert Einstein: Philosopher-Scientist (lk 1–95). Open Court.
[19] Carnap, R. (1963). Intellektuaalne autobiograafia. Kogumikus P. A. Schilpp (toim.), The Philosophy of Rudolf Carnap (lk 3–84). Open Court. (Einsteini käsitlus eristusest Sein/Werden ja „praegu“-probleemist, lk 37–38.)
[20] Wheeler, J. A., & DeWitt, B. S. (1967). Gravitatsiooni kvantteooria. I. Physical Review, 160(5), 1113–1148.
[21] Barbour, J. (1999). The End of Time: The Next Revolution in Physics. Oxford University Press.
[22] Gödel, K. (1931). Über formal unentscheidbare Sätze der Principia Mathematica und verwandter Systeme I. Monatshefte für Mathematik und Physik, 38(1), 173–198.
[23] Zheng, J., & Meister, M. (2024). Olemise talumatu aeglus: miks me elame kiirusel 10 bitti/s? Neuron, 113(2), 192-204.
[24] Seth, A. (2021). Being You: A New Science of Consciousness. Dutton.
[25] Hoffman, D. D., Singh, M., & Prakash, C. (2015). Taju liidese teooria. Psychonomic Bulletin & Review, 22(6), 1480-1506.
[26] Bostrom, N. (2003). Kas sa elad arvutisimulatsioonis? Philosophical Quarterly, 53(211), 243-255.
[27] Li, M., & Vitányi, P. (2008). An Introduction to Kolmogorov Complexity and Its Applications. Springer.
[28] Tishby, N., Pereira, F. C., & Bialek, W. (1999). Informatsioonilise pudelikaela meetod. Proceedings of the 37th Allerton Conference on Communication, Control, and Computing, 368–377.
[29] Crutchfield, J. P., & Young, K. (1989). Statistilise keerukuse järeldamine. Physical Review Letters, 63(2), 105–108.
[30] McFadden, J. (2002). Sünkroonne tulistamine ja selle mõju aju elektromagnetväljale: tõendid teadvuse elektromagnetvälja teooria kasuks. Journal of Consciousness Studies, 9(4), 23-50.
[31] Pockett, S. (2000). The Nature of Consciousness: A Hypothesis. iUniverse.
[32] Hameroff, S., & Penrose, R. (1996). Kvantkoherentsi orkestreeritud redutseerimine aju mikrotuubulites: teadvuse mudel. Mathematics and Computers in Simulation, 40(3-4), 453-480.
[33] Goff, P. (2019). Galileo’s Error: Foundations for a New Science of Consciousness. Pantheon Books.
[34] Goyal, P., & Skilling, J. (2012). Kvantteooria ja tõenäosusteooria: nende seos ja päritolu sümmeetrias. Symmetry, 4(1), 171–206.
[35] Varela, F., Lachaux, J-P., Rodriguez, E., & Martinerie, J. (2001). Ajukude: faasisünkroniseerimine ja suuremõõtmeline integratsioon. Nature Reviews Neuroscience, 2(4), 229–239.
[36] Hume, D. (1748). An Enquiry Concerning Human Understanding.
[37] Dennett, D. C. (1984). Elbow Room: The Varieties of Free Will Worth Wanting. MIT Press.
[38] Verlinde, E. (2011). Gravitatsiooni ja Newtoni seaduste päritolust. Journal of High Energy Physics, 2011(4), 29.
[39] Eisert, J., Cramer, M., & Plenio, M. B. (2010). Kolokvium: põimumisentroopia pindalaseadused. Reviews of Modern Physics, 82(1), 277.
[40] Bekenstein, J. D. (1981). Entroopia ja energia suhte universaalne ülempiir piiratud süsteemides. Physical Review D, 23(2), 287.
[41] Cover, T. M., & Thomas, J. A. (2006). Elements of Information Theory (2nd ed.). Wiley-Interscience.
[42] Almheiri, A., Dong, X., & Harlow, D. (2015). Mahu lokaalsus ja kvantvigade parandus AdS/CFT-s. Journal of High Energy Physics, 2015(4), 163.
[43] Vidal, G. (2008). Kvantpaljukehaste olekute klass, mida saab tõhusalt simuleerida. Physical Review Letters, 101(11), 110501.
[44] Pastawski, F., Yoshida, B., Harlow, D., & Preskill, J. (2015). Holograafilised kvantvigade parandamise koodid: mängumudelid mahu/piiri vastavuse jaoks. Journal of High Energy Physics, 2015(6), 149.
[45] Hofstadter, D. R. (1979). Gödel, Escher, Bach: An Eternal Golden Braid. Basic Books.
[46] Revonsuo, A. (2000). Unenägude ümbertõlgendamine: unenägemise funktsiooni evolutsiooniline hüpotees. Behavioral and Brain Sciences, 23(6), 877–901.
[47] Block, N. (1995). Teadvuse ühe funktsiooni ümber valitsevast segadusest. Behavioral and Brain Sciences, 18(2), 227–247.
[48] Bhatt, D. L., & Abbott, L. F. (2009). Sünapside informatsioonimahtuvus. Journal of Computational Neuroscience, 26, 239–253.
[49] Libet, B., Gleason, C. A., Wright, E. W., & Pearl, D. K. (1983). Teadliku tegutsemiskavatsuse aeg võrreldes ajutegevuse algusega (valmiduspotentsiaal). Brain, 106(3), 623-642.
[50] Nijhawan, R. (1994). Liikumise ekstrapolatsioon püüdmises. Nature, 370(6486), 256-257.
[51] Gleason, A. M. (1957). Mõõdud Hilberti ruumi kinnistel alamruumidel. Journal of Mathematics and Mechanics, 6(6), 885-893.
[52] Landauer, R. (1961). Pöördumatus ja soojuse teke arvutusprotsessis. IBM Journal of Research and Development, 5(3), 183-191.
[53] Borges, J. L. (1944). Ficciones. Editorial Sur.
[54] Jacobson, T. (1995). Aegruumi termodünaamika: Einsteini võrrand kui olekuvõrrand. Physical Review Letters, 75(7), 1260-1263.
[55] Knill, E., & Laflamme, R. (1997). Kvantvigade parandamise koodide teooria. Physical Review A, 55(2), 900.
[56] Martin-Löf, P. (1966). Juhuslike jadade definitsioon. Information and Control, 9(6), 602-619.
[57] Everett, H. (1957). Kvantmehaanika „suhtelise oleku“ formulatsioon. Reviews of Modern Physics, 29(3), 454.
[58] Carter, B. (1983). Antroopiline printsiip ja selle järeldused bioloogilise evolutsiooni jaoks. Philosophical Transactions of the Royal Society of London. Series A, 310(1512), 347-363.
[59] Leslie, J. (1989). Universes. Routledge.
[60] Gott, J. R. (1993). Koperniku printsiibi järeldused meie tulevikuväljavaadete jaoks. Nature, 363(6427), 315-319.
[61] Müller, M. P. (2020). Seadus ilma seaduseta: vaatleja olekutest füüsikani algoritmilise informatsiooniteooria kaudu. Quantum, 4, 301.
[62] Müller, M. P. (2026). Algoritmiline idealism: mida peaksid sa uskuma, et kogeda järgmisena? Foundations of Physics, 55, 26.
[63] Sienicki, K. (2024). Algoritmiline idealism I: reaalsuse ümbermõtestamine informatsiooni ja kogemuse kaudu. arXiv preprint arXiv:2412.20485.
[64] Khan, A. K. (2025). Vaatleja: informatsiooniteoreetiline perspektiiv. ICFO-Institut de Ciencies Fotoniques. University of Barcelona.
[65] Campos-García, T. (2025). Teadvuse renderdus: postbohmilik raamistik reaalsuse ontoloogilise struktuuri jaoks. Preprints, 2025110947.
[66] Zimmermann, M. (1989). Närvisüsteem informatsiooniteooria kontekstis. Kogumikus R. F. Schmidt & G. Thews (toim.), Human Physiology (2nd ed., lk 166–173). Springer-Verlag.
[67] Nørretranders, T. (1998). The User Illusion: Cutting Consciousness Down to Size. Viking/Penguin.
[68] Baron, S., Miller, K., & Tallant, J. (2022). Out of Time: A Philosophical Study of Timelessness. Oxford University Press.
[69] Rovelli, C. (1996). Relatsiooniline kvantmehaanika. International Journal of Theoretical Physics, 35(8), 1637–1678.
[70] Adlam, E., & Rovelli, C. (2023). Informatsioon on füüsiline: perspektiividevahelised seosed relatsioonilises kvantmehaanikas. Philosophy of Physics, 1(1), 4.
[71] Deutsch, D., & Marletto, C. (2015). Informatsiooni konstruktoriteooria. Proceedings of the Royal Society A, 471(2174), 20140540.
[72] Deutsch, D., & Marletto, C. (2025). Aja konstruktoriteooria. arXiv preprint arXiv:2505.08692.
[73] Ramstead, M. J. D., Sakthivadivel, D. A. R., Heins, C., Koudahl, M., Millidge, B., Da Costa, L., Klein, B., & Friston, K. J. (2023). Bayesi mehaanikast: uskumuste füüsika ja füüsika uskumuste kaudu. Interface Focus, 13(3), 20220029.
[74] Adlam, E. (2022). Loodusseadused kui piirangud. Foundations of Physics, 52(1), 28.
[75] Ladyman, J., & Ross, D. (2007). Every Thing Must Go: Metaphysics Naturalized. Oxford University Press.
[76] Ladyman, J., & Lorenzetti, L. (2023). Tõhus ontlik struktuurrealism. Studies in History and Philosophy of Science, 100, 39–49.
[77] Cea, I., et al. (2024). Teadvuse integreeritud informatsiooni teooria kui pseudoteadus. Frontiers in Psychology, 15, 1396827.
[78] Cogitate Consortium (2025). Globaalse neuronaalse tööruumi ja integreeritud informatsiooni teooriate vastandlik testimine teadvuse vallas. Nature. doi:10.1038/s41586-025-08888-1. (Varasem eeltrükk: Melloni, L., et al. (2023). bioRxiv. doi:10.1101/2023.06.23.546249.)
[79] Bortolotti, N., Curceanu, C., Diósi, L., Manti, S., & Piscicchia, K. (2025). Kella täpsuse fundamentaalsed piirid aegruumi määramatusest kvantkollapsi mudelites. Physical Review Research, 7. doi:10.1103/p6tj-lg8l. arXiv:2504.06109.
[80] Fuchs, C. A., Mermin, N. D., & Schack, R. (2014). Sissejuhatus QBismi koos rakendusega kvantmehaanika lokaalsusele. American Journal of Physics, 82(8), 749–754.
[81] Zurek, W. H. (2009). Kvantdarvinism. Nature Physics, 5(3), 181–188.
[82] Clark, A. (2016). Surfing Uncertainty: Prediction, Action, and the Embodied Mind. Oxford University Press.
[83] Hohwy, J. (2013). The Predictive Mind. Oxford University Press.
[84] Baars, B. J. (1988). A Cognitive Theory of Consciousness. Cambridge University Press.
[85] Hutter, M. (2005). Universal Artificial Intelligence: Sequential Decisions Based on Algorithmic Probability. Springer.
[86] Maldacena, J. (1998). Superkonformsete väljateooriate suure N piiri ja supergravitatsiooni kohta. Advances in Theoretical and Mathematical Physics, 2(2), 231–252. arXiv:hep-th/9711200.
[87] Bousso, R. (2002). Holograafiline printsiip. Reviews of Modern Physics, 74(3), 825–874.
[88] Van Raamsdonk, M. (2010). Aegruumi ülesehitamine kvantpõimumise abil. General Relativity and Gravitation, 42(10), 2323–2329.
[89] Ryu, S., & Takayanagi, T. (2006). Põimumisentroopia holograafiline tuletus AdS/CFT-st. Physical Review Letters, 96(18), 181602.
[90] Griffiths, R. B. (1984). Kooskõlalised ajalood ja kvantmehaanika tõlgendus. Journal of Statistical Physics, 36(1-2), 219–272.
[91] Gell-Mann, M., & Hartle, J. B. (1993). Klassikalised võrrandid kvantsüsteemide jaoks. Physical Review D, 47(8), 3345–3382.
[92] Bennett, C. H. (1973). Arvutuse loogiline pööratavus. IBM Journal of Research and Development, 17(6), 525–532.
[93] Rosenthal, D. M. (2005). Consciousness and Mind. Oxford University Press.
[94] Lau, H., & Rosenthal, D. (2011). Empiiriline toetus kõrgema järgu teooriatele teadlikust teadvustamisest. Trends in Cognitive Sciences, 15(8), 365–373.
[95] Graziano, M. S. A. (2013). Consciousness and the Social Brain. Oxford University Press.
[96] Doerig, A., Schurger, A., Hess, K., & Herzog, M. H. (2019). Lahtirullumise argument: miks IIT ja teised põhjusliku struktuuri teooriad ei suuda teadvust seletada. Consciousness and Cognition, 72, 49–59.
[97] Aaronson, S. (2014). Miks ma ei ole integreeritud informatsiooni teoreetik (ehk Teadvustamatu Paisutaja). Shtetl-Optimized (blogi), 30. mai 2014.
[98] Barrett, A. B., & Mediano, P. A. M. (2019). Integreeritud informatsiooni mõõt \Phi ei ole üldiste füüsikaliste süsteemide jaoks hästi määratletud. Journal of Consciousness Studies, 26(1–2), 11–20.
[99] Hanson, J. R. (2020). Integreeritud informatsiooni teooria ja \Phi praktiline mittearvutatavus. Magistritaseme kogemuslik essee, veebis.
[100] Tononi, G., Sporns, O., & Edelman, G. M. (1994). Aju keerukuse mõõt: funktsionaalse segregatsiooni ja integratsiooni seostamine närvisüsteemis. Proceedings of the National Academy of Sciences, 91(11), 5033–5037. (Vt ka Friston, K. J., Tononi, G., Sporns, O., & Edelman, G. M. (1995). Neuronaalsete interaktsioonide keerukuse iseloomustamine. Human Brain Mapping, 3(4), 302–314.)
[101] Nunez, P. L., & Srinivasan, R. (2014). Neokortikaalne dünaamika aksoni levikuviivituste tõttu kortiko-kortikaalsetes kiududes: EEG levivad ja seisulained koos järeldustega ülalt-alla mõjudele lokaalsetes võrkudes ja valgeaine haigusele. Brain Research, 1542, 138–166.
Versiooniajalugu
See on elav dokument. Sisulised muudatused registreeritakse siin.
| Versioon | Kuupäev | Kokkuvõte |
|---|---|---|
| 1.0.0 | 28. märts 2026 | Esmane avalik väljalase. Teoreetiline karkass AIT-i ja Vaba Energia Printsiibi kaudu. |
| 1.1.0 | 29. märts 2026 | Publikatsioonikvaliteediga diagrammid. |
| 1.1.1 | 30. märts 2026 | Sõnavara kooskõlastamine jaotise 4 väljateooria-võrdluses. |
| 1.2.0 | 30. märts 2026 | Asümmeetriline holograafia Fano võrratuse kaudu. Ühtlustatud terminoloogia esseega v1.2.0. |
| 1.5.0 | 30. märts 2026 | Täpne sümmeetria murdumise järjestus lahendatud. |
| 1.5.1 | 31. märts 2026 | Pudelkitsenduse piir formaliseeriti ümber, kasutades Nõutavat prediktiivset määra (R_{\mathrm{req}}). |
| 1.5.2 | 31. märts 2026 | Täpsustatud Stabiilsusfilter kui virtuaalne projektiivne piir, mitte kausaalne mehhanism. |
| 1.6.0 | 31. märts 2026 | Versioonihaldus ja ribalaiuse viited sünkroniseeritud eetikatekstiga. |
| 1.6.1 | 31. märts 2026 | Terminaalne lahustumine põhjendatud Solomonoffi lihtsuse aprioorsega. |
| 1.6.2 | 1. aprill 2026 | Informatsiooni ribalaiuse piir tuletatud kui empiirilised T-1 piirangud. |
| 1.6.3 | 1. aprill 2026 | T-2, T-3 ja T-5 integreeritud põhituletustesse. |
| 2.0.0 | 2. aprill 2026 | Integreeritud T-6 kuni T-9; epistemilist tagasihoidlikkust tugevdatud läbivalt. |
| 2.1.0 | 3. aprill 2026 | Terminoloogia “Autopoeetiline” eemaldatud; asendatud väljendiga “Informatsiooniline hooldus”. |
| 2.2.0 | 4. aprill 2026 | Borni reegel (P-2) ja Fenomenaalne jääk (P-4) formaliseeritud. |
| 2.3.1 | 5. aprill 2026 | Ümberraamistatud kui “tingimusliku ühilduvuse programm”. Emergentseid väiteid alandati sillapostulaatideks. |
| 2.3.2 | 7. aprill 2026 | Kõigis lisades taastati ajaloolised ülesande/teoreemi pealkirjad. |
| 2.3.3 | 7. aprill 2026 | P-4-s taastati puuduv võrrandiplokk. |
| 2.4.0 | 12. aprill 2026 | Lisatud AI-järeldused (§7.8) ja lisa E-6 (Sünteetilised vaatlejad). |
| 2.5.0 | 12. aprill 2026 | Lisa E-8: LLM-i planeerimislüngad kaardistatud globaalse tööruumi piirangutele. |
| 2.5.1 | 12. aprill 2026 | P-4 tuletusi täpsustatud; E-6 moraalse patsiendi piiranguid tugevdatud. |
| 2.5.2 | 12. aprill 2026 | Hiljutiste algoritmiliste ontoloogiate võrdlev analüüs (§7.9). |
| 2.5.3 | 13. aprill 2026 | Fenomenaalne jääk taasankurdati arvutatavuse piirangutesse (retsenseerimisvastus). |
| 2.6.0 | 15. aprill 2026 | Integreeritud solipsismi säästlikkuse argument; kaardistatud OPT vs. Mülleri algoritmiline idealism. |
| 2.6.1 | 15. aprill 2026 | §8.7: Boltzmanni aju lahustumine Stabiilsusfiltri kaudu; BB/LLM/vaatleja võrdlustabel. |
| 2.7.0 | 16. aprill 2026 | Intellektuaalne genealoogia (Zimmermann, Nørretranders). IIT-st lahknemine teravdatud. GWT võrdlus. |
| 2.8.0 | 17. aprill 2026 | Sisendi/väljundi asümmeetria lahustatud. Haruvalik lokaliseeritud \Delta_{\text{self}}-sse. Lisatud T-13 teekaardi punkt. |
| 3.0.0 | 17. aprill 2026 | Suur ümberkorraldus. Narratiivne triiv formaliseeritud (T-12). Vaatlejatevaheline sidestus (T-10). Kaasnev filosoofiline artikkel. T-13 laiendatud. |
| 3.1.0 | 20. aprill 2026 | §8.13 (Koperniklik ümberpööramine): vaatlejakeskne ontoloogia, mida piirab substraadialane tagasihoidlikkus. |
| 3.2.0 | 22. aprill 2026 | §8.5: OPT ajaline hoiak paigutatud Baroni, Milleri ja Tallanti veateooria taksonoomiasse. |
| 3.2.1 | 23. aprill 2026 | §7.1: kahe pilu illustratiivne juhtum; RQM (Rovelli). §7.3: Bayesi mehaanika. §7.4: IIT kombinatsiooniprobleem ja adversaarne koostöö. §7.9: konstruktoriteooria; OSR. §8.5: aja konstruktoriteooria. §8.6: seadused kui piirangud (Adlam). §8.14: AI konsolideerimise jaotis. |
| 3.3.0 | 30. aprill 2026 | §7.1 punktid 6–10 (MWI, objektiivne kollaps / Bortolotti, QBism,
kvantdarvinism, dekoherentsed ajalood). §7.2: suhestumine holograafilise
kirjandusega (Maldacena, Bousso, Van Raamsdonk, Ryu-Takayanagi). §7.3
ümber nimetatud ja laiendatud (prediktiivne töötlus). §7.8: AIXI kui
piiramatu Solomonoffi piir. §7.10: GWT selle ranges tähenduses. §7.11:
HOT ja AST. §2 / §7.9: Wheeleri “It from Bit” tunnustatud alusliku
eelkäijana. §3.6.3: Bennetti loogiline pööratavus viidatud koos
Landaueriga. §6.8: Falsifitseerimiskohustused F1–F5 ja
sulgemiskriteeriumid eelregistreeriti selle commit’i seisuga.
§7.12: teooriad, millega OPT on tõepoolest ühildumatu.
Püsiv red-team fail (red-team.md) lisatud väljapoole
avaldatud artiklite komplekti. |
| 3.4.0 | 30. aprill 2026 | Abstrakt: Verlinde’i ja MERA vastenduste selgesõnaline Matemaatilise
küllastumise raamistik kui pakkepiiri komplementaarsed tahud
(dünaamilis-ajaline vs. ruumilise eraldusvõimega seotud). §7.1:
koodeki-geomeetria kohustuse lõik. OPT võtab nüüd avalikult
omaks tugevama tõlgenduse, et koodeki Hilberti struktuur toimib üle kogu
renderdatud ajajoone, ennustades kvantsignatuure sügavas kosmoloogilises
minevikus (nt CMB-s) kui vaatleja kõige paremini kokkusurutava mineviku
tunnuseid, mitte kui substraaditasandi kvantsündmusi renderdatud jälje
tekkimise ajal. Falsifitseerija: kirjelduspikkuse liiasus kosmoloogilise
ajaloo tunnustes üle inflatsioonilis-kvantilise vaikeseade; käsitletud
kui §6.8 projekti sulgemise kandidaat. Koordineeritud kirjed
red-team.md R11 (kosmoloogiline survepunkt) ja R12
(meta-kahtlus, et v3.4.0 kohustus näib motiveeritud tagantjärele
immuniseerimisena). Teooria abstrakti lõpulause: “empiirilised
põhiväited on koondatud mitmeks eelregistreeritud kohustuseks koos
selgesõnaliste sulgemiskriteeriumidega.” |
| 3.4.1 | 30. aprill 2026 | Viide [78] uuendatud bioRxiv 2023 eeltrükilt ametlikuks Cogitate
Consortiumi Nature 2025 publikatsiooniks; §7.4 ja §7.10
sõnastust täpsustatud, et kajastada asjaolu, et vaidlustati nii
IIT kui ka GNWT põhiteese (IIT puhul posteriorne sünkroniseerimine; GNWT
puhul prefrontaalne süttimine). §7.8: struktuurne nõue
vs. bioloogiline konstant. OPT struktuurse kriteeriumi (olemas
on C_{\max}, ribalaiusega piiratud
jadaline järjestamine) selgesõnaline lahutamine empiirilisest
bioloogilisest suurusest (\sim 10
bitti/s) — sünteetilistel vaatlejatel on arhitektuurist tuletatud C_{\max}^{\text{si}}, mida inimese arv ei
piira. F1 (§6.8) täpsustatud kui inimvaatleja kohustus; F3 üldistub üle
substraatide. Koordineeritud kirjed red-team.md R13 (10
bitti/s suurusjärk on praeguses kirjanduses vaieldav) ja R14
(CMB-anomaaliate vaatlused on põhimõtteliselt testitavad, kuid ükski
2026. aasta tulemus ei ole otsustav). |
| 3.4.0 | 1. mai 2026 | §7.4: käsitletud Unfolding Argument’i (Doerig et al. [96]); ühe rea viited Aaronsonile [97], Barrettile & Medianole [98], Hansonile [99]. §6.5: Nunezi & Srinivasani [101] liikuvate/seisvate lainete põhjendus ennustusasümmeetriale. §8.12: Fristoni, Tononi, Spornsi & Edelmanni 1995 [100] genealoogiline joonealune märkus integratsiooni/pakkimise suuna kohta. Lisatud lisa T-14: ribalaiuse-struktuuri mitteinvariantsus funktsionaalse ekvivalentsuse all — formaalne väljapääs Unfolding-dilemmast. |